正在加载图片...
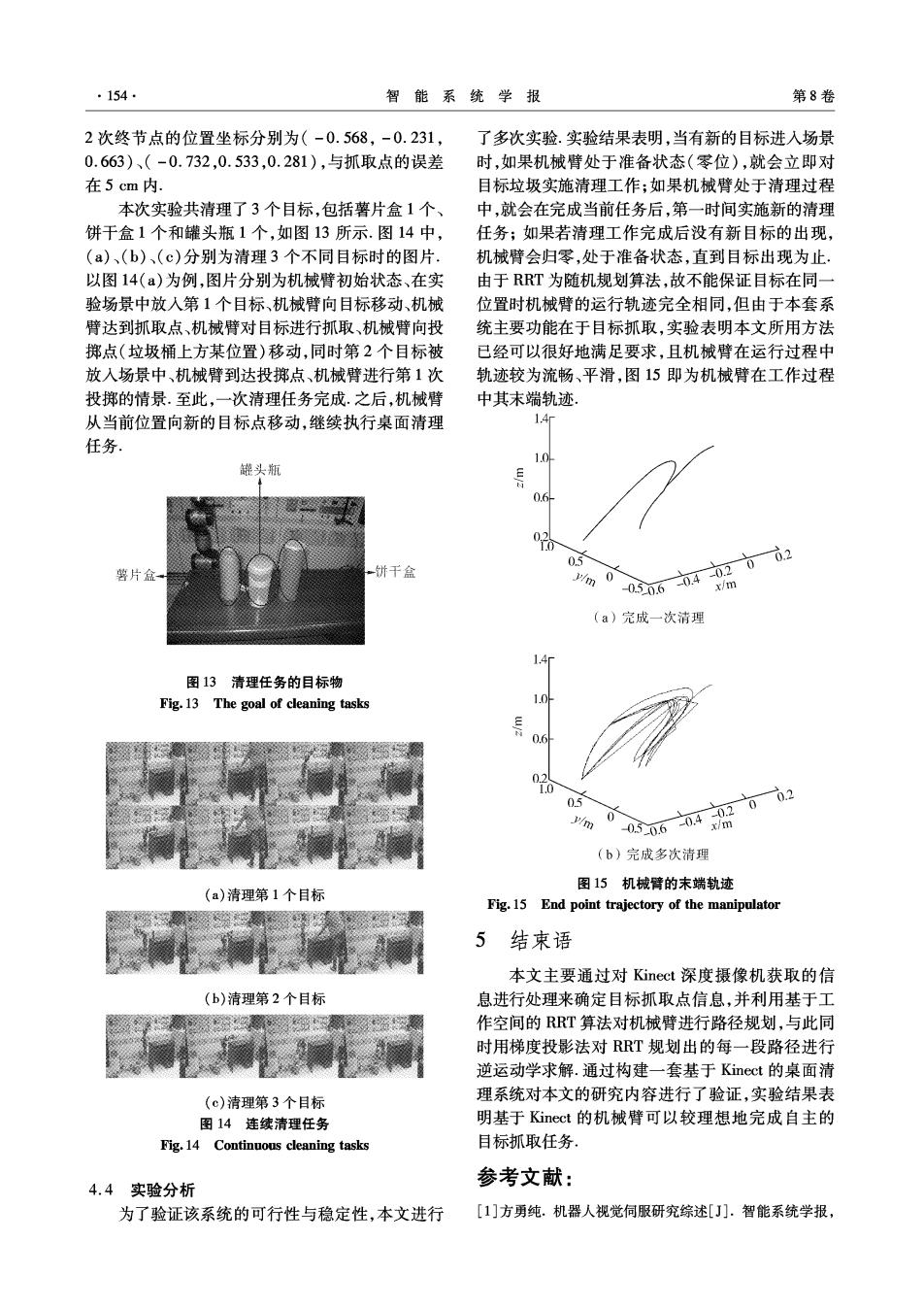
·154· 智能系统学报 第8卷 2次终节点的位置坐标分别为(-0.568,-0.231, 了多次实验.实验结果表明,当有新的目标进入场景 0.663)、(-0.732,0.533,0.281),与抓取点的误差 时,如果机械臂处于准备状态(零位),就会立即对 在5cm内. 目标垃圾实施清理工作;如果机械臂处于清理过程 本次实验共清理了3个目标,包括薯片盒1个、 中,就会在完成当前任务后,第一时间实施新的清理 饼干盒1个和罐头瓶1个,如图13所示.图14中, 任务;如果若清理工作完成后没有新目标的出现, (a)、(b)、(c)分别为清理3个不同目标时的图片. 机械臂会归零,处于准备状态,直到目标出现为止 以图14(a)为例,图片分别为机械臂初始状态、在实 由于RRT为随机规划算法,故不能保证目标在同一 验场景中放入第1个目标、机械臂向目标移动、机械 位置时机械臂的运行轨迹完全相同,但由于本套系 臂达到抓取点、机械臂对目标进行抓取、机械臂向投 统主要功能在于目标抓取,实验表明本文所用方法 掷点(垃圾桶上方某位置)移动,同时第2个目标被 已经可以很好地满足要求,且机械臂在运行过程中 放人场景中、机械臂到达投掷点、机械臂进行第1次 轨迹较为流畅、平滑,图15即为机械臂在工作过程 投掷的情景.至此,一次清理任务完成.之后,机械臂 中其末端轨迹 从当前位置向新的目标点移动,继续执行桌面清理 1.4 任务. 罐头瓶 05 薯片盒 饼干盒 /m0 -006040.2002 x/m (a)完成一次清理 1.4r 图13清理任务的目标物 Fig.13 The goal of cleaning tasks 1.0 0.6 0.5 y/m 06-0.40.200.2 0 (b)完成多次清理 图15机械臂的未端轨迹 (a)清理第1个目标 Fig.15 End point trajectory of the manipulator 5结束语 本文主要通过对Kinect深度摄像机获取的信 (b)清理第2个目标 息进行处理来确定目标抓取点信息,并利用基于工 作空间的RRT算法对机械臂进行路径规划,与此同 时用梯度投影法对RRT规划出的每一段路径进行 逆运动学求解.通过构建一套基于Kinect的桌面清 (c)清理第3个目标 理系统对本文的研究内容进行了验证,实验结果表 图14连续清理任务 明基于Kinect的机械臂可以较理想地完成自主的 Fig.14 Continuous cleaning tasks 目标抓取任务 参考文献: 4.4实验分析 为了验证该系统的可行性与稳定性,本文进行 [1]方勇纯.机器人视觉伺服研究综述[J小.智能系统学报