正在加载图片...
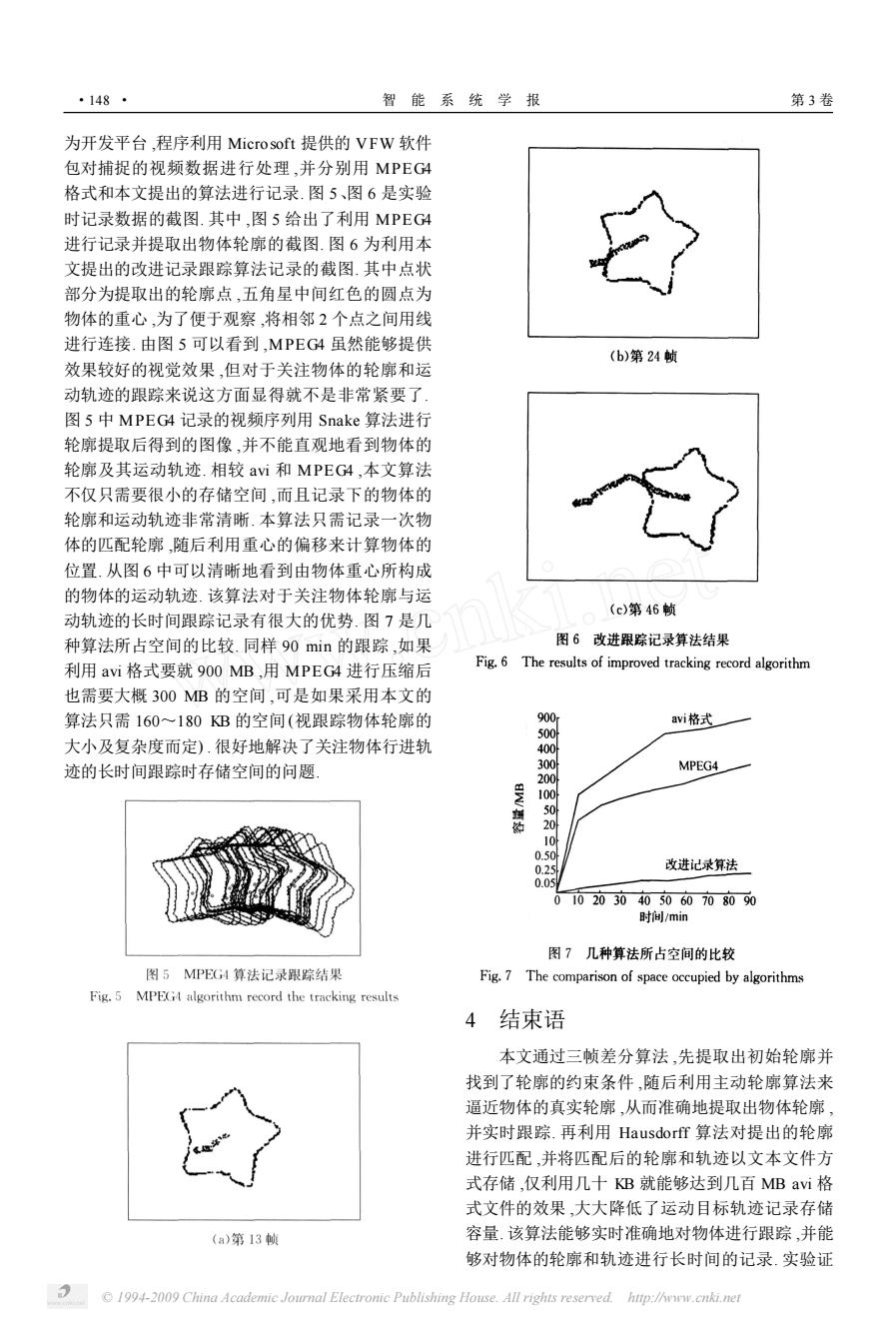
·148· 智能系统学报 第3卷 为开发平台,程序利用Micro soft提供的VFW软件 包对捕捉的视频数据进行处理,并分别用MPEG4 格式和本文提出的算法进行记录.图5、图6是实验 时记录数据的截图.其中,图5给出了利用MPEG4 进行记录并提取出物体轮廓的截图.图6为利用本 文提出的改进记录跟踪算法记录的截图.其中点状 部分为提取出的轮廓点,五角星中间红色的圆点为 物体的重心,为了便于观察,将相邻2个点之间用线 进行连接.由图5可以看到,MPEG4虽然能够提供 (b)第24帧 效果较好的视觉效果,但对于关注物体的轮廓和运 动轨迹的跟踪来说这方面显得就不是非常紧要了, 图5中MPEG4记录的视频序列用Snake算法进行 轮廓提取后得到的图像,并不能直观地看到物体的 轮廓及其运动轨迹.相较avi和MPEG4,本文算法 不仅只需要很小的存储空间,而且记录下的物体的 轮廓和运动轨迹非常清晰.本算法只需记录一次物 体的匹配轮廓,随后利用重心的偏移来计算物体的 位置.从图6中可以清晰地看到由物体重心所构成 的物体的运动轨迹.该算法对于关注物体轮廓与运 (c)第46帧 动轨迹的长时间跟踪记录有很大的优势.图7是几 种算法所占空间的比较.同样90min的跟踪,如果 图6改进跟踪记录算法结果 利用avi格式要就900MB,用MPEG4进行压缩后 Fig.6 The results of improved tracking record algorithm 也需要大概300MB的空间,可是如果采用本文的 算法只需160~180KB的空间(视跟踪物体轮廓的 900 avi格式一 500 大小及复杂度而定).很好地解决了关注物体行进轨 400 迹的长时间跟踪时存储空间的问题, 300 MPEG4 200, 100 0 20 0.50 0.25 改进记录算法 0.05 102030405060708090 时间/min 图7几种算法所占空间的比较 图5MPEG1算法记录跟踪结果 Fig.7 The comparison of space occupied by algorithms Fig.5 MPEG4 algorithm record the tracking results 4结束语 本文通过三帧差分算法,先提取出初始轮廓并 找到了轮廓的约束条件,随后利用主动轮廓算法来 逼近物体的真实轮廓,从而准确地提取出物体轮廓, 并实时跟踪.再利用Hausdorff算法对提出的轮廓 进行匹配,并将匹配后的轮廓和轨迹以文本文件方 式存储,仅利用几十KB就能够达到几百MB avi格 式文件的效果,大大降低了运动目标轨迹记录存储 (a)第13顿 容量.该算法能够实时准确地对物体进行跟踪,并能 够对物体的轮廓和轨迹进行长时间的记录.实验证 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.htp://www.cnki.net为开发平台 ,程序利用 Microsoft 提供的 VFW 软件 包对捕捉的视频数据进行处理 ,并分别用 MPEG4 格式和本文提出的算法进行记录. 图 5、图 6 是实验 时记录数据的截图. 其中 ,图 5 给出了利用 MPEG4 进行记录并提取出物体轮廓的截图. 图 6 为利用本 文提出的改进记录跟踪算法记录的截图. 其中点状 部分为提取出的轮廓点 ,五角星中间红色的圆点为 物体的重心 ,为了便于观察 ,将相邻 2 个点之间用线 进行连接. 由图 5 可以看到 ,MPEG4 虽然能够提供 效果较好的视觉效果 ,但对于关注物体的轮廓和运 动轨迹的跟踪来说这方面显得就不是非常紧要了. 图 5 中 MPEG4 记录的视频序列用 Snake 算法进行 轮廓提取后得到的图像 ,并不能直观地看到物体的 轮廓及其运动轨迹. 相较 avi 和 MPEG4 ,本文算法 不仅只需要很小的存储空间 ,而且记录下的物体的 轮廓和运动轨迹非常清晰. 本算法只需记录一次物 体的匹配轮廓 ,随后利用重心的偏移来计算物体的 位置. 从图 6 中可以清晰地看到由物体重心所构成 的物体的运动轨迹. 该算法对于关注物体轮廓与运 动轨迹的长时间跟踪记录有很大的优势. 图 7 是几 种算法所占空间的比较. 同样 90 min 的跟踪 ,如果 利用 avi 格式要就 900 MB ,用 MPEG4 进行压缩后 也需要大概 300 MB 的空间 ,可是如果采用本文的 算法只需 160~180 KB 的空间(视跟踪物体轮廓的 大小及复杂度而定) . 很好地解决了关注物体行进轨 迹的长时间跟踪时存储空间的问题. 4 结束语 本文通过三帧差分算法 ,先提取出初始轮廓并 找到了轮廓的约束条件 ,随后利用主动轮廓算法来 逼近物体的真实轮廓 ,从而准确地提取出物体轮廓 , 并实时跟踪. 再利用 Hausdorff 算法对提出的轮廓 进行匹配 ,并将匹配后的轮廓和轨迹以文本文件方 式存储 ,仅利用几十 KB 就能够达到几百 MB avi 格 式文件的效果 ,大大降低了运动目标轨迹记录存储 容量. 该算法能够实时准确地对物体进行跟踪 ,并能 够对物体的轮廓和轨迹进行长时间的记录. 实验证 ·148 · 智 能 系 统 学 报 第 3 卷 © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net