正在加载图片...
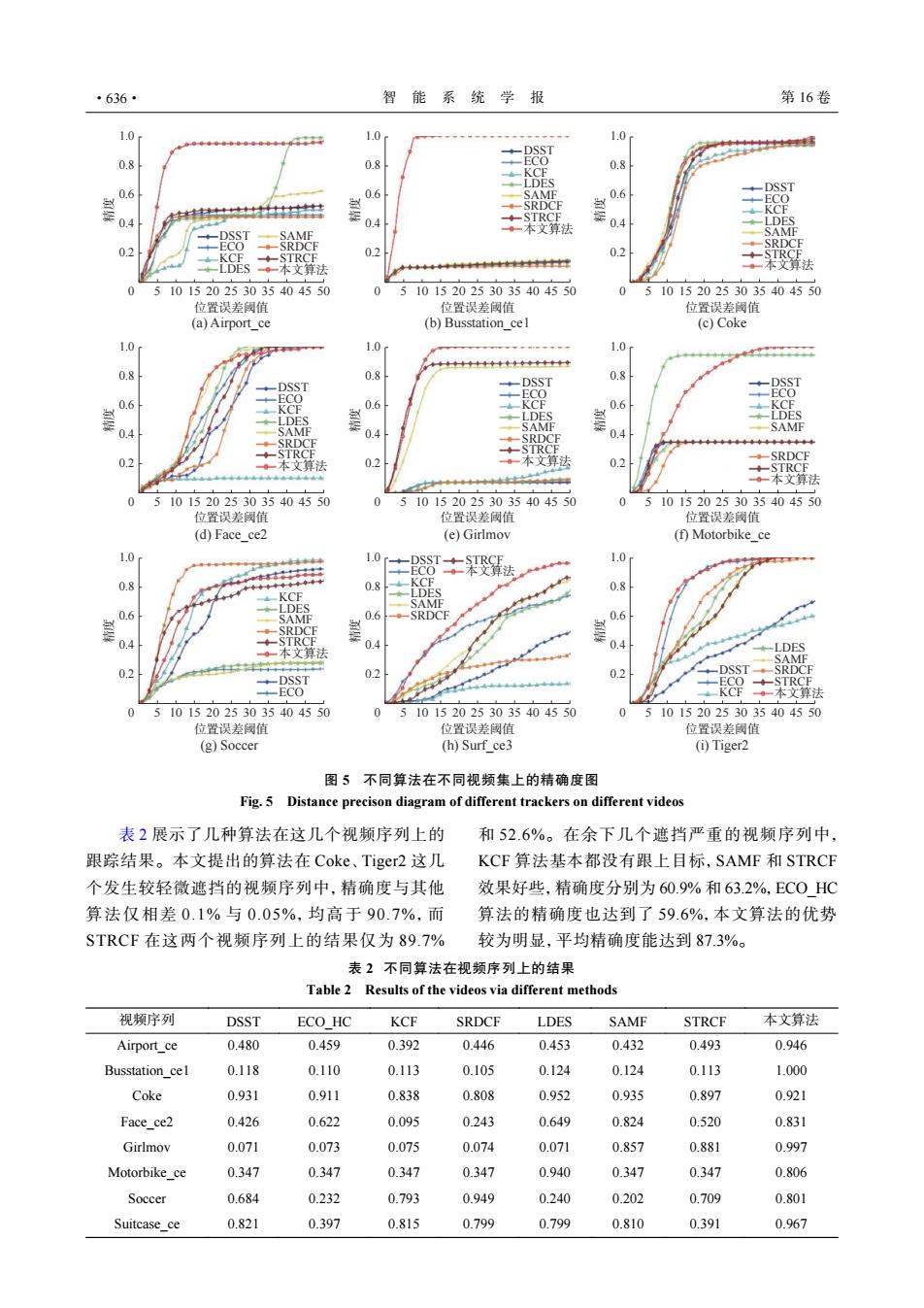
·636· 智能系统学报 第16卷 1.0 1.0 1.0 -DSST 0.8 Q8 0.8 0.6 0.6 0.6 04 04 0.4 DSST SAMF 本文算法 AME 0.2 ECO KCF ◆-STRCE 02 。一本文算法 文算法 10 1520253035404550 5 101520253035404550 101520253035404550 位置误差阚值 位置误差阅值 位置误差圆值 (a)Airport ce (b)Busstation cel (c)Coke 1.0 1.0 1.0 0.8 0.8 -DSST DSST 0.8 -DSST ECO FCO 0.6 ECO KCF 0.6 KCF 0.6 KCF LDES LDES ★-LDES SAME SAME samf 0.4 0.4 0.4 SRDCE SRDCE 0.2 本文算法 0.2 文算法 0.2 -STRC 本文算法 5101520253035404550 0 5101520253035404550 5101520253035404550 位置误差阚值 位置误差阅值 位置误差圆值 (d)Face ce2 (e)Girlmov (f)Motorbike ce 0 DSST -STRCF 1.0 本文算法 0.8 0.8 0.8 0.6 0.6 0.6 0.4 04 0.4 本文算法 0.2 0.2 DSST 0.2 DSST- +一ECO◆STRCF ECO KCF ·一本文算法 101520253035404550 0 5101520253035404550 5 101520253035404550 位置误差阈值 位置误差國值 位置误差圆值 (g)Soccer (h)Surf ce3 (①)Tiger.2 图5不同算法在不同视频集上的精确度图 Fig.5 Distance precison diagram of different trackers on different videos 表2展示了几种算法在这几个视频序列上的 和52.6%。在余下几个遮挡严重的视频序列中, 跟踪结果。本文提出的算法在Coke、Tiger2这几 KCF算法基本都没有跟上目标,SAMF和STRCF 个发生较轻微遮挡的视频序列中,精确度与其他 效果好些,精确度分别为60.9%和63.2%,EC0HC 算法仅相差0.1%与0.05%,均高于90.7%,而 算法的精确度也达到了59.6%,本文算法的优势 STRCF在这两个视频序列上的结果仅为89.7% 较为明显,平均精确度能达到87.3%。 表2不同算法在视频序列上的结果 Table 2 Results of the videos via different methods 视频序列 DSST ECO HC KCF SRDCF LDES SAMF STRCF 本文算法 Airport ce 0.480 0.459 0.392 0.446 0.453 0.432 0.493 0.946 Busstation cel 0.118 0.110 0.113 0.105 0.124 0.124 0.113 1.000 Coke 0.931 0.911 0.838 0.808 0.952 0.935 0.897 0.921 Face ce2 0.426 0.622 0.095 0.243 0.649 0.824 0.520 0.831 Girlmov 0.071 0.073 0.075 0.074 0.071 0.857 0.881 0.997 Motorbike ce 0.347 0.347 0.347 0.347 0.940 0.347 0.347 0.806 Soccer 0.684 0.232 0.793 0.949 0.240 0.202 0.709 0.801 Suitcase_ce 0.821 0.397 0.815 0.799 0.799 0.810 0.391 0.9671.0 5 10 15 20 25 30 35 40 45 50 精度 (a) Airport_ce (b) Busstation_ce1 (c) Coke (d) Face_ce2 (e) Girlmov (f) Motorbike_ce (g) Soccer (h) Surf_ce3 (i) Tiger2 位置误差阈值 位置误差阈值 位置误差阈值 位置误差阈值 位置误差阈值 位置误差阈值 位置误差阈值 位置误差阈值 位置误差阈值 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 1.0 5 10 15 20 25 30 35 40 45 50 精度 0.8 0.6 0.4 0.2 0 DSST ECO KCF LDES DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 SAMF SRDCF STRCF 本文算法 DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 DSST ECO KCF LDES SAMF SRDCF STRCF 本文算法 图 5 不同算法在不同视频集上的精确度图 Fig. 5 Distance precison diagram of different trackers on different videos 表 2 展示了几种算法在这几个视频序列上的 跟踪结果。本文提出的算法在 Coke、Tiger2 这几 个发生较轻微遮挡的视频序列中,精确度与其他 算法仅相差 0.1% 与 0.05%,均高于 90.7%,而 STRCF 在这两个视频序列上的结果仅为 89.7% 和 52.6%。在余下几个遮挡严重的视频序列中, KCF 算法基本都没有跟上目标,SAMF 和 STRCF 效果好些,精确度分别为 60.9% 和 63.2%,ECO_HC 算法的精确度也达到了 59.6%,本文算法的优势 较为明显,平均精确度能达到 87.3%。 表 2 不同算法在视频序列上的结果 Table 2 Results of the videos via different methods 视频序列 DSST ECO_HC KCF SRDCF LDES SAMF STRCF 本文算法 Airport_ce 0.480 0.459 0.392 0.446 0.453 0.432 0.493 0.946 Busstation_ce1 0.118 0.110 0.113 0.105 0.124 0.124 0.113 1.000 Coke 0.931 0.911 0.838 0.808 0.952 0.935 0.897 0.921 Face_ce2 0.426 0.622 0.095 0.243 0.649 0.824 0.520 0.831 Girlmov 0.071 0.073 0.075 0.074 0.071 0.857 0.881 0.997 Motorbike_ce 0.347 0.347 0.347 0.347 0.940 0.347 0.347 0.806 Soccer 0.684 0.232 0.793 0.949 0.240 0.202 0.709 0.801 Suitcase_ce 0.821 0.397 0.815 0.799 0.799 0.810 0.391 0.967 ·636· 智 能 系 统 学 报 第 16 卷