正在加载图片...
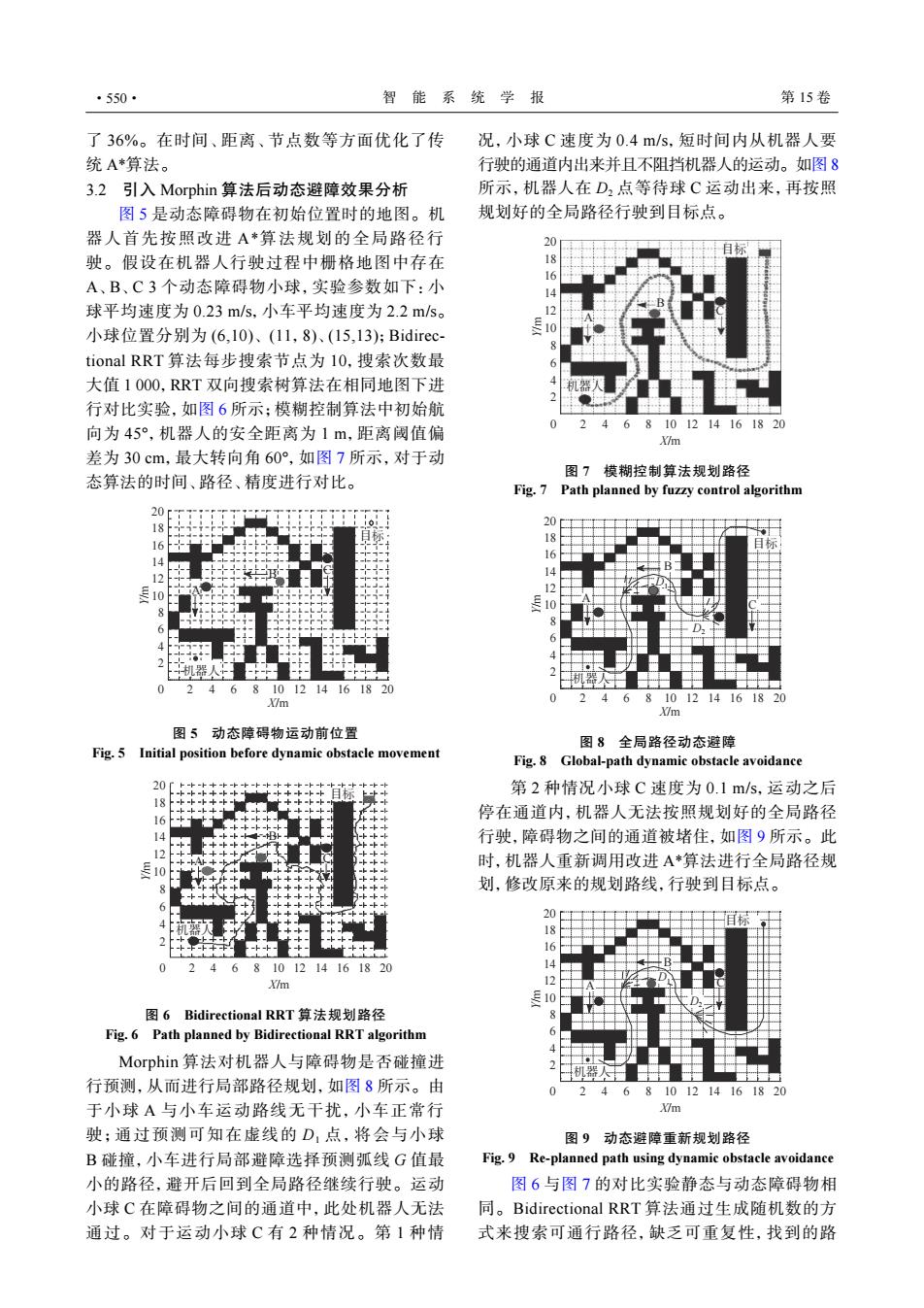
·550· 智能系统学报 第15卷 了36%。在时间、距离、节点数等方面优化了传 况,小球C速度为0.4m/s,短时间内从机器人要 统A*算法。 行驶的通道内出来并且不阻挡机器人的运动。如图8 3.2引入Morphin算法后动态避障效果分析 所示,机器人在D2点等待球C运动出来,再按照 图5是动态障碍物在初始位置时的地图。机 规划好的全局路径行驶到目标点。 器人首先按照改进A*算法规划的全局路径行 20 目标 驶。假设在机器人行驶过程中栅格地图中存在 18 16 A、B、C3个动态障碍物小球,实验参数如下:小 14 球平均速度为0.23m/s,小车平均速度为2.2m/s。 小球位置分别为(6,10)、(11,8)、(15,13):Bidirec- 号10 tional RRT算法每步搜索节点为l0,搜索次数最 大值1O00,RRT双向搜索树算法在相同地图下进 机器人 行对比实验,如图6所示:模糊控制算法中初始航 0 向为45°,机器人的安全距离为1m,距离阈值偏 2 468101214161820 m 差为30cm,最大转向角60°,如图7所示,对于动 图7模糊控制算法规划路径 态算法的时间、路径、精度进行对比。 Fig.7 Path planned by fuzzy control algorithm 20 18F 20 16 18 16 14 10 机器人上上 机器人 2468101214161820 X/m 0 2468101214161820 X/m 图5动态障碍物运动前位置 图8全局路径动态避障 Fig.5 Initial position before dynamic obstacle movement Fig.8 Global-path dynamic obstacle avoidance 20上+-+++ 第2种情况小球C速度为0.1m/s,运动之后 18 16 停在通道内,机器人无法按照规划好的全局路径 14 行驶,障碍物之间的通道被堵住,如图9所示。此 12 时,机器人重新调用改进A*算法进行全局路径规 10 划,修改原来的规划路线,行驶到目标点。 20 18 16 0 68101214161820 14 X/m 号10 图6 Bidirectional RRT算法规划路径 Fig.6 Path planned by Bidirectional RRT algorithm Morphin算法对机器人与障碍物是否碰撞进 机器人 行预测,从而进行局部路径规划,如图8所示。由 0 2468101214161820 于小球A与小车运动路线无干扰,小车正常行 X/m 驶;通过预测可知在虚线的D,点,将会与小球 图9动态避障重新规划路径 B碰撞,小车进行局部避障选择预测弧线G值最 Fig.9 Re-planned path using dynamic obstacle avoidance 小的路径,避开后回到全局路径继续行驶。运动 图6与图7的对比实验静态与动态障碍物相 小球C在障碍物之间的通道中,此处机器人无法 同。Bidirectional RRT算法通过生成随机数的方 通过。对于运动小球C有2种情况。第1种情 式来搜索可通行路径,缺乏可重复性,找到的路了 36%。在时间、距离、节点数等方面优化了传 统 A*算法。 3.2 引入 Morphin 算法后动态避障效果分析 图 5 是动态障碍物在初始位置时的地图。机 器人首先按照改进 A*算法规划的全局路径行 驶。假设在机器人行驶过程中栅格地图中存在 A、B、C 3 个动态障碍物小球,实验参数如下:小 球平均速度为 0.23 m/s,小车平均速度为 2.2 m/s。 小球位置分别为 (6,10)、 (11,8)、(15,13);Bidirectional RRT 算法每步搜索节点为 10,搜索次数最 大值 1 000,RRT 双向搜索树算法在相同地图下进 行对比实验,如图 6 所示;模糊控制算法中初始航 向为 45°,机器人的安全距离为 1 m,距离阈值偏 差为 30 cm,最大转向角 60°,如图 7 所示,对于动 态算法的时间、路径、精度进行对比。 机器人 目标 C A B 0 2 4 6 8 10 12 14 16 20 18 2 4 6 8 10 12 14 16 18 20 X/m Y/m 图 5 动态障碍物运动前位置 Fig. 5 Initial position before dynamic obstacle movement A B C 0 2 4 6 8 10 12 14 16 20 18 2 4 6 8 10 12 14 16 18 20 X/m Y/m 目标 机器人 图 6 Bidirectional RRT 算法规划路径 Fig. 6 Path planned by Bidirectional RRT algorithm Morphin 算法对机器人与障碍物是否碰撞进 行预测,从而进行局部路径规划,如图 8 所示。由 于小球 A 与小车运动路线无干扰,小车正常行 驶;通过预测可知在虚线的 D1 点,将会与小球 B 碰撞,小车进行局部避障选择预测弧线 G 值最 小的路径,避开后回到全局路径继续行驶。运动 小球 C 在障碍物之间的通道中,此处机器人无法 通过。对于运动小球 C 有 2 种情况。第 1 种情 况,小球 C 速度为 0.4 m/s,短时间内从机器人要 行驶的通道内出来并且不阻挡机器人的运动。如图 8 所示,机器人在 D2 点等待球 C 运动出来,再按照 规划好的全局路径行驶到目标点。 A B C 0 2 4 6 8 10 12 14 16 20 18 2 4 6 8 10 12 14 16 18 20 X/m Y/m 目标 机器人 图 7 模糊控制算法规划路径 Fig. 7 Path planned by fuzzy control algorithm 机器人 目标 0 2 4 6 8 10 12 14 16 20 18 2 4 6 8 10 12 14 16 18 20 X/m Y/m A B D2 C D1 图 8 全局路径动态避障 Fig. 8 Global-path dynamic obstacle avoidance 第 2 种情况小球 C 速度为 0.1 m/s,运动之后 停在通道内,机器人无法按照规划好的全局路径 行驶,障碍物之间的通道被堵住,如图 9 所示。此 时,机器人重新调用改进 A*算法进行全局路径规 划,修改原来的规划路线,行驶到目标点。 C 机器人 目标 0 2 4 6 8 10 12 14 16 20 18 2 4 6 8 10 12 14 16 18 20 X/m Y/m A B D1 D2 图 9 动态避障重新规划路径 Fig. 9 Re-planned path using dynamic obstacle avoidance 图 6 与图 7 的对比实验静态与动态障碍物相 同。Bidirectional RRT 算法通过生成随机数的方 式来搜索可通行路径,缺乏可重复性,找到的路 ·550· 智 能 系 统 学 报 第 15 卷