正在加载图片...
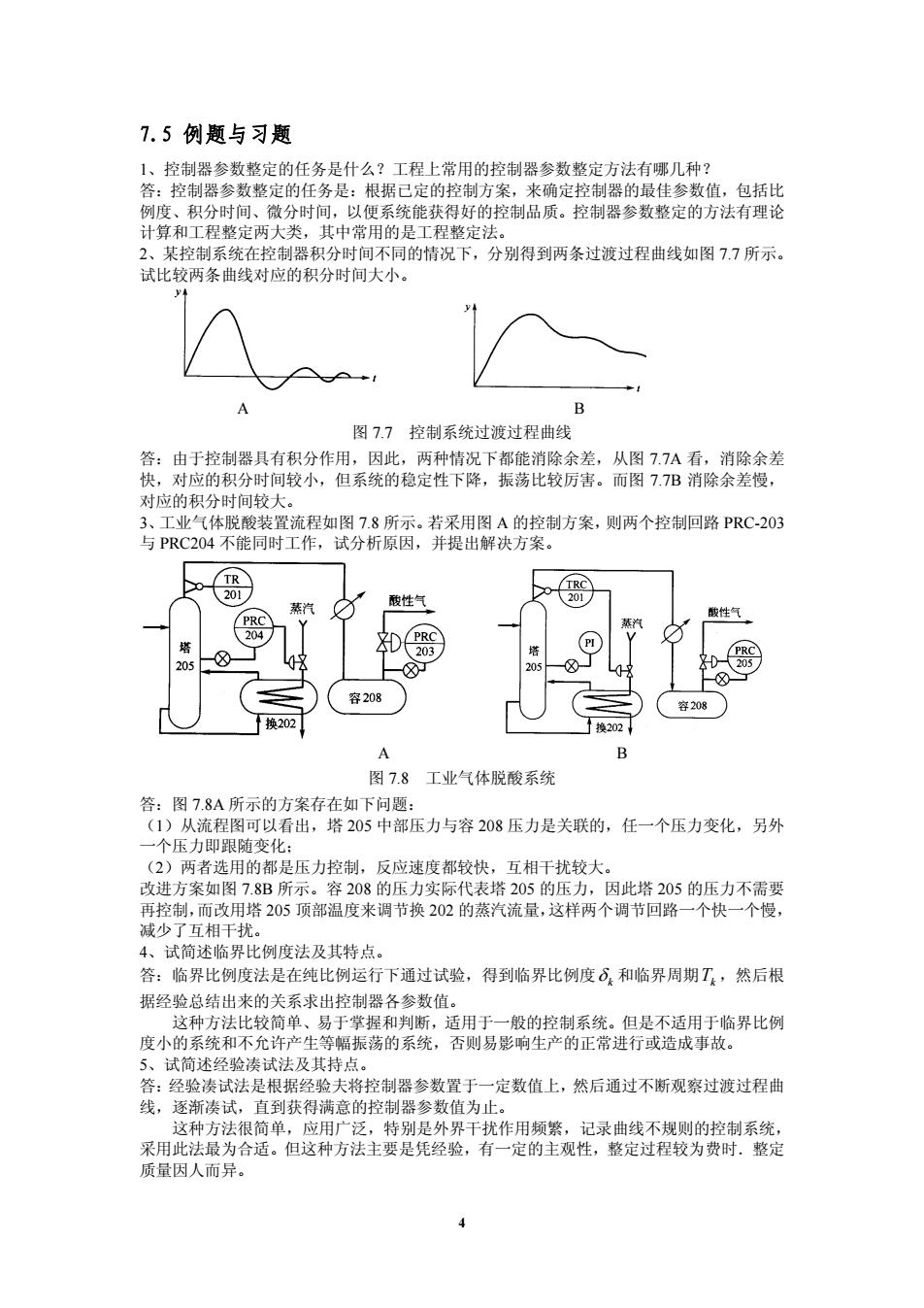
7.5例题与习题 1、控制器参数整定的任务是什么?工程上常用的控制器参数整定方法有哪几种? 答:控制器参数整定的任务是:根据已定的控制方案,来确定控制器的最佳参数值,包括比 例度、积分时间、微分时间,以便系统能获得好的控制品质。控制器参数整定的方法有理论 计算和工程整定两大类,其中常用的是工程整定法。 2、某控制系统在控制器积分时间不同的情况下,分别得到两条过渡过程曲线如图77所示。 试比较两条曲线对应的积分时间大小。 图7.7控制系统过渡过程曲线 答:由于控制器具有积分作用,因此,两种情况下都能消除余差,从图7.7A看,消除余差 快,对应的积分时间较小,但系统的稳定性下降,振荡比较厉害。而图77B消除余差慢, 对应的积分时间较大。 3、工业气体脱酸装置流程如图7.8所示。若采用图A的控制方案,则两个控制回路P℉C-203 与PRC204不能同时工作,试分析原因,并提出解决方案。 TR TRC 201 蒸汽 酸性气 201 酸性气 PRC 基汽 204 PRC 203 塔 205 205 205 容208 容208 换20 换202 图7.8工业气体脱酸系统 答:图7.8A所示的方案存在如下问题: (1)从流程图可以看出,塔205中部压力与容208压力是关联的,任一个压力变化,另外 一个压力即跟随变化: (2)两者选用的都是压力控制,反应速度都较快,互相干扰较大。 改进方案如图7.8B所示。容208的压力实际代表塔205的压力,因此塔205的压力不需要 再控制,而改用塔205顶部温度来调节换202的蒸汽流量,这样两个调节回路一个快一个慢, 减少了互相干扰。 4、试简述临界比例度法及其特点。 答:临界比例度法是在纯比例运行下通过试验,得到临界比例度6和临界周期T,然后根 据经验总结出来的关系求出控制器各参数值。 这种方法比较简单、易于掌握和判断,适用于一般的控制系统。但是不适用于临界比例 度小的系统和不允许产生等幅振荡的系统,否则易影响生产的正常进行或造成事故。 5、试简述经验凑试法及其持点。 答:经验凑试法是根据经验夫将控制器参数置于一定数值上,然后通过不断观察过渡过程曲 线,逐渐凑试,直到获得满意的控制器参数值为止。 这种方法很简单,应用广泛,特别是外界干扰作用频繁,记录曲线不规则的控制系统, 采用此法最为合适。但这种方法主要是凭经验,有一定的主观性,整定过程较为费时.整定 质量因人而异。7.5 例题与习题 1、控制器参数整定的任务是什么?工程上常用的控制器参数整定方法有哪几种? 答:控制器参数整定的任务是:根据已定的控制方案,来确定控制器的最佳参数值,包括比 例度、积分时间、微分时间,以便系统能获得好的控制品质。控制器参数整定的方法有理论 计算和工程整定两大类,其中常用的是工程整定法。 2、某控制系统在控制器积分时间不同的情况下,分别得到两条过渡过程曲线如图 7.7 所示。 试比较两条曲线对应的积分时间大小。 A B 图 7.7 控制系统过渡过程曲线 答:由于控制器具有积分作用,因此,两种情况下都能消除余差,从图 7.7A 看,消除余差 快,对应的积分时间较小,但系统的稳定性下降,振荡比较厉害。而图 7.7B 消除余差慢, 对应的积分时间较大。 3、工业气体脱酸装置流程如图 7.8 所示。若采用图 A 的控制方案,则两个控制回路 PRC-203 与 PRC204 不能同时工作,试分析原因,并提出解决方案。 A B 图 7.8 工业气体脱酸系统 答:图 7.8A 所示的方案存在如下问题: (1)从流程图可以看出,塔 205 中部压力与容 208 压力是关联的,任一个压力变化,另外 一个压力即跟随变化; (2)两者选用的都是压力控制,反应速度都较快,互相干扰较大。 改进方案如图 7.8B 所示。容 208 的压力实际代表塔 205 的压力,因此塔 205 的压力不需要 再控制,而改用塔 205 顶部温度来调节换 202 的蒸汽流量,这样两个调节回路一个快一个慢, 减少了互相干扰。 4、试简述临界比例度法及其特点。 答:临界比例度法是在纯比例运行下通过试验,得到临界比例度δ k 和临界周期 ,然后根 据经验总结出来的关系求出控制器各参数值。 Tk 这种方法比较简单、易于掌握和判断,适用于一般的控制系统。但是不适用于临界比例 度小的系统和不允许产生等幅振荡的系统,否则易影响生产的正常进行或造成事故。 5、试简述经验凑试法及其持点。 答:经验凑试法是根据经验夫将控制器参数置于一定数值上,然后通过不断观察过渡过程曲 线,逐渐凑试,直到获得满意的控制器参数值为止。 这种方法很简单,应用广泛,特别是外界干扰作用频繁,记录曲线不规则的控制系统, 采用此法最为合适。但这种方法主要是凭经验,有一定的主观性,整定过程较为费时.整定 质量因人而异。 4