正在加载图片...
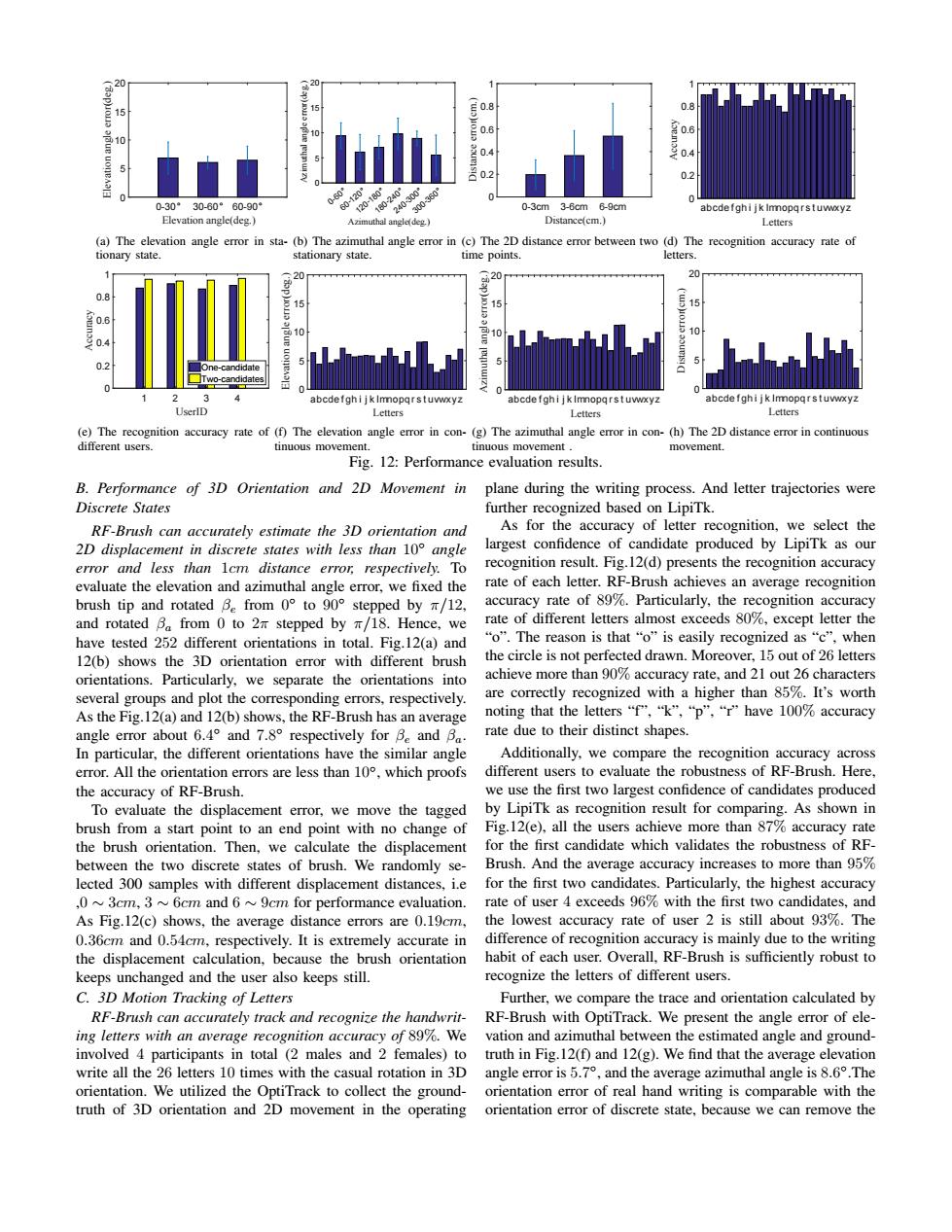
20 20 15 0.8 0.8 0.6 0.6 0. 0.4 0.2 060 20 2a0 0 0-30°30-60°60-90 240 0-3cm3-6cm6-9cm abcdefghi jk Imopqrstuwxyz Elevation angle(deg.) Azimuthal angledeg.) Distance(cm.) Letters (a)The elevation angle error in sta-(b)The azimuthal angle error in (c)The 2D distance error between two (d)The recognition accuracy rate of tionary state. stationary state. time points. letters. 15 ne-can 0-candidate 2 abcdefghi jkImmopqrstuvxyz abcde fghi jk Imnopgrstuwxyz abcde fghi jk UserID Letters Letters Letters (e)The recognition accuracy rate of (f)The elevation angle error in con-(g)The azimuthal angle error in con-(h)The 2D distance error in continuous different users. tinuous movement. tinuous movement movement. Fig.12:Performance evaluation results. B.Performance of 3D Orientation and 2D Movement in plane during the writing process.And letter trajectories were Discrete States further recognized based on LipiTk. RF-Brush can accurately estimate the 3D orientation and As for the accuracy of letter recognition,we select the 2D displacement in discrete states with less than 10 angle largest confidence of candidate produced by LipiTk as our error and less than 1cm distance error.respectively.To recognition result.Fig.12(d)presents the recognition accuracy evaluate the elevation and azimuthal angle error,we fixed the rate of each letter.RF-Brush achieves an average recognition brush tip and rotated Be from0°to90°stepped byπ/l2, accuracy rate of 89%.Particularly,the recognition accuracy and rotated Ba from 0 to 2m stepped by /18.Hence,we rate of different letters almost exceeds 80%,except letter the have tested 252 different orientations in total.Fig.12(a)and “o.The reason is that“o”is easily recognized as“c”,when 12(b)shows the 3D orientation error with different brush the circle is not perfected drawn.Moreover,15 out of 26 letters orientations.Particularly,we separate the orientations into achieve more than 90%accuracy rate,and 21 out 26 characters several groups and plot the corresponding errors,respectively. are correctly recognized with a higher than 85%.It's worth As the Fig.12(a)and 12(b)shows,the RF-Brush has an average noting that the letters“f,k”,"p”,"r”have 10o%accuracy angle error about 6.4 and 7.8 respectively for Be and Ba. rate due to their distinct shapes. In particular,the different orientations have the similar angle Additionally,we compare the recognition accuracy across error.All the orientation errors are less than 10,which proofs different users to evaluate the robustness of RF-Brush.Here, the accuracy of RF-Brush. we use the first two largest confidence of candidates produced To evaluate the displacement error,we move the tagged by LipiTk as recognition result for comparing.As shown in brush from a start point to an end point with no change of Fig.12(e),all the users achieve more than 87%accuracy rate the brush orientation.Then,we calculate the displacement for the first candidate which validates the robustness of RF- between the two discrete states of brush.We randomly se- Brush.And the average accuracy increases to more than 95% lected 300 samples with different displacement distances,i.e for the first two candidates.Particularly,the highest accuracy ,0~3cm,3~6cm and 6~9cm for performance evaluation. rate of user 4 exceeds 96%with the first two candidates,and As Fig.12(c)shows,the average distance errors are 0.19cm, the lowest accuracy rate of user 2 is still about 93%.The 0.36cm and 0.54cm,respectively.It is extremely accurate in difference of recognition accuracy is mainly due to the writing the displacement calculation,because the brush orientation habit of each user.Overall,RF-Brush is sufficiently robust to keeps unchanged and the user also keeps still. recognize the letters of different users. C.3D Motion Tracking of Letters Further,we compare the trace and orientation calculated by RF-Brush can accurately track and recognize the handwrit- RF-Brush with OptiTrack.We present the angle error of ele- ing letters with an average recognition accuracy of 89%.We vation and azimuthal between the estimated angle and ground- involved 4 participants in total (2 males and 2 females)to truth in Fig.12(f)and 12(g).We find that the average elevation write all the 26 letters 10 times with the casual rotation in 3D angle error is5.7°,and the average azimuthal angle is8.6°.The orientation.We utilized the OptiTrack to collect the ground- orientation error of real hand writing is comparable with the truth of 3D orientation and 2D movement in the operating orientation error of discrete state.because we can remove the0-30° 30-60° 60-90° Elevation angle(deg.) 0 5 10 15 20 Elevation angle error(deg.) (a) The elevation angle error in stationary state. 0-60° 60-120° 120-180° 180-240° 240-300° 300-360° Azimuthal angle(deg.) 0 5 10 15 20 Azimuthal angle error(deg.) (b) The azimuthal angle error in stationary state. 0-3cm 3-6cm 6-9cm Distance(cm.) 0 0.2 0.4 0.6 0.8 1 Distance error(cm.) (c) The 2D distance error between two time points. abcde f gh i j k lmnopq r s t uvwxyz Letters 0 0.2 0.4 0.6 0.8 1 Accuracy (d) The recognition accuracy rate of letters. 1 2 3 4 UserID 0 0.2 0.4 0.6 0.8 1 Accuracy One-candidate Two-candidates (e) The recognition accuracy rate of different users. abcde f gh i j k lmnopq r s t uvwxyz Letters 0 5 10 15 20 Elevation angle error(deg.) (f) The elevation angle error in continuous movement. abcde f gh i j k lmnopq r s t uvwxyz Letters 0 5 10 15 20 Azimuthal angle error(deg.) (g) The azimuthal angle error in continuous movement . abcde f gh i j k lmnopq r s t uvwxyz Letters 0 5 10 15 20 Distance error(cm.) (h) The 2D distance error in continuous movement. Fig. 12: Performance evaluation results. B. Performance of 3D Orientation and 2D Movement in Discrete States RF-Brush can accurately estimate the 3D orientation and 2D displacement in discrete states with less than 10◦ angle error and less than 1cm distance error, respectively. To evaluate the elevation and azimuthal angle error, we fixed the brush tip and rotated βe from 0 ◦ to 90◦ stepped by π/12, and rotated βa from 0 to 2π stepped by π/18. Hence, we have tested 252 different orientations in total. Fig.12(a) and 12(b) shows the 3D orientation error with different brush orientations. Particularly, we separate the orientations into several groups and plot the corresponding errors, respectively. As the Fig.12(a) and 12(b) shows, the RF-Brush has an average angle error about 6.4 ◦ and 7.8 ◦ respectively for βe and βa. In particular, the different orientations have the similar angle error. All the orientation errors are less than 10◦ , which proofs the accuracy of RF-Brush. To evaluate the displacement error, we move the tagged brush from a start point to an end point with no change of the brush orientation. Then, we calculate the displacement between the two discrete states of brush. We randomly selected 300 samples with different displacement distances, i.e ,0 ∼ 3cm, 3 ∼ 6cm and 6 ∼ 9cm for performance evaluation. As Fig.12(c) shows, the average distance errors are 0.19cm, 0.36cm and 0.54cm, respectively. It is extremely accurate in the displacement calculation, because the brush orientation keeps unchanged and the user also keeps still. C. 3D Motion Tracking of Letters RF-Brush can accurately track and recognize the handwriting letters with an average recognition accuracy of 89%. We involved 4 participants in total (2 males and 2 females) to write all the 26 letters 10 times with the casual rotation in 3D orientation. We utilized the OptiTrack to collect the groundtruth of 3D orientation and 2D movement in the operating plane during the writing process. And letter trajectories were further recognized based on LipiTk. As for the accuracy of letter recognition, we select the largest confidence of candidate produced by LipiTk as our recognition result. Fig.12(d) presents the recognition accuracy rate of each letter. RF-Brush achieves an average recognition accuracy rate of 89%. Particularly, the recognition accuracy rate of different letters almost exceeds 80%, except letter the “o”. The reason is that “o” is easily recognized as “c”, when the circle is not perfected drawn. Moreover, 15 out of 26 letters achieve more than 90% accuracy rate, and 21 out 26 characters are correctly recognized with a higher than 85%. It’s worth noting that the letters “f”, “k”, “p”, “r” have 100% accuracy rate due to their distinct shapes. Additionally, we compare the recognition accuracy across different users to evaluate the robustness of RF-Brush. Here, we use the first two largest confidence of candidates produced by LipiTk as recognition result for comparing. As shown in Fig.12(e), all the users achieve more than 87% accuracy rate for the first candidate which validates the robustness of RFBrush. And the average accuracy increases to more than 95% for the first two candidates. Particularly, the highest accuracy rate of user 4 exceeds 96% with the first two candidates, and the lowest accuracy rate of user 2 is still about 93%. The difference of recognition accuracy is mainly due to the writing habit of each user. Overall, RF-Brush is sufficiently robust to recognize the letters of different users. Further, we compare the trace and orientation calculated by RF-Brush with OptiTrack. We present the angle error of elevation and azimuthal between the estimated angle and groundtruth in Fig.12(f) and 12(g). We find that the average elevation angle error is 5.7 ◦ , and the average azimuthal angle is 8.6 ◦ .The orientation error of real hand writing is comparable with the orientation error of discrete state, because we can remove the