正在加载图片...
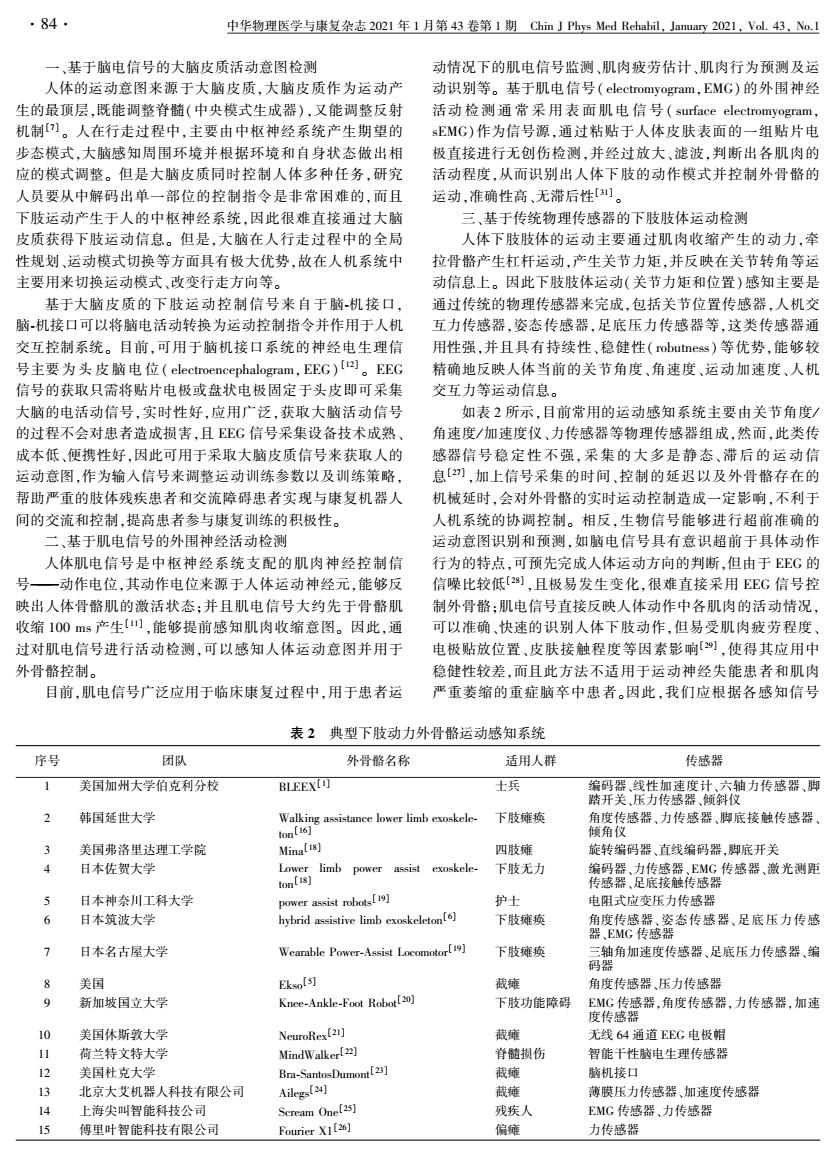
…84· 中华物理医学与康复杂志2021年1月第43卷第1期Chim』Phys Med Rehabil,January2021,Vol.43,No.1 一、基于脑电信号的大脑皮质活动意图检测 动情况下的肌电信号监测、肌肉疲劳估计、肌肉行为预测及运 人体的运动意图来源于大脑皮质,大脑皮质作为运动产 动识别等。基于肌电信号(electromyogram,EMG)的外围神经 生的最顶层,既能调整脊髓(中央模式生成器),又能调整反射 活动检测通常采用表面肌电信号(surface electromyogram, 机制]。人在行走过程中,主要由中枢神经系统产生期望的 sEMG)作为信号源,通过粘贴于人体皮肤表面的一组贴片电 步态模式,大脑感知周围环境并根据环境和自身状态做出相 极直接进行无创伤检测,并经过放大、滤波,判断出各肌肉的 应的模式调整。但是大脑皮质同时控制人体多种任务,研究 活动程度,从而识别出人体下肢的动作模式并控制外骨骼的 人员要从中解码出单一部位的控制指令是非常困难的,而且 运动,准确性高、无滞后性3。 下肢运动产生于人的中枢神经系统,因此很难直接通过大脑 三、基于传统物理传感器的下肢肢体运动检测 皮质获得下肢运动信息。但是,大脑在人行走过程中的全局 人体下肢肢体的运动主要通过肌肉收缩产生的动力,牵 性规划、运动模式切换等方面具有极大优势,故在人机系统中 拉骨骼产生杠杆运动,产生关节力矩,并反映在关节转角等运 主要用来切换运动模式、改变行走方向等。 动信息上。因此下肢肢体运动(关节力矩和位置)感知主要是 基于大脑皮质的下肢运动控制信号来自于脑机接口, 通过传统的物理传感器来完成,包括关节位置传感器,人机交 脑机接口可以将脑电活动转换为运动控制指令并作用于人机 互力传感器,姿态传感器,足底压力传感器等,这类传感器通 交互控制系统。目前,可用于脑机接口系统的神经电生理信 用性强,并且具有持续性、稳健性(robutness)等优势,能够较 号主要为头皮脑电位(electroencephalogram,EEG)【。EEG 精确地反映人体当前的关节角度、角速度、运动加速度、人机 信号的获取只需将贴片电极或盘状电极固定于头皮即可采集 交互力等运动信息。 大脑的电活动信号,实时性好,应用广泛,获取大脑活动信号 如表2所示,目前常用的运动感知系统主要由关节角度/ 的过程不会对患者造成损害,且EEG信号采集设备技术成熟、 角速度/加速度仪、力传感器等物理传感器组成,然而,此类传 成本低、便携性好,因此可用于采取大脑皮质信号来获取人的 感器信号稳定性不强,采集的大多是静态、滞后的运动信 运动意图,作为输入信号来调整运动训练参数以及训练策略, 息[2),加上信号采集的时间、控制的延迟以及外骨骼存在的 帮助严重的肢体残疾患者和交流障碍患者实现与康复机器人 机械延时,会对外骨骼的实时运动控制造成一定影响,不利于 间的交流和控制,提高患者参与康复训练的积极性。 人机系统的协调控制。相反,生物信号能够进行超前准确的 二、基于肌电信号的外围神经活动检测 运动意图识别和预测,如脑电信号具有意识超前于具体动作 人体肌电信号是中枢神经系统支配的肌肉神经控制信 行为的特点,可预先完成人体运动方向的判断,但由于EEG的 号一动作电位,其动作电位来源于人体运动神经元,能够反 信噪比较低(2],且极易发生变化,很难直接采用EEG信号控 映出人体骨骼肌的激活状态:并且肌电信号大约先于骨骼肌 制外骨骼:肌电信号直接反映人体动作中各肌肉的活动情况, 收缩100ms产生[),能够提前感知肌肉收缩意图。因此,通 可以准确、快速的识别人体下肢动作,但易受肌肉疲劳程度 过对肌电信号进行活动检测,可以感知人体运动意图并用于 电极贴放位置、皮肤接触程度等因素影响[2],使得其应用中 外骨骼控制。 稳健性较差,而且此方法不适用于运动神经失能患者和肌肉 目前,肌电信号广泛应用于临床康复过程中,用于患者运 严重萎缩的重症脑卒中患者。因此,我们应根据各感知信号 表2典型下肢动力外骨骼运动感知系统 序号 团队 外骨骼名称 适用人群 传感器 1 美国加州大学伯克利分校 BLEEXO可 士兵 编码器、线性加速度计、六轴力传感器、脚 踏开关、压力传感器、倾斜仪 韩国延世大学 Walking assistance lower limb exoskele- 下肢瘫痪 角度传感器、力传感器、脚底接触传感器、 ton[16] 倾角仪 3 美国弗洛里达理工学院 Minal 1s] 四肢瘫 旋转编码器、直线编码器,脚底开关 日本佐贺大学 Lower limb power assist exoskele- 下肢无力 编码器,力传感器、EMG传感器、激光测距 ton[is] 传感器、足底接触传感器 5 日本神奈川工科大学 power assist robots[] 护士 电阻式应变压力传感器 6 日本筑波大学 hybrid assistive limb exoskeleton[6] 下肢瘫痪 角度传感器、姿态传感器、足底压力传感 器、EMG传感器 7 日本名古屋大学 Wearable Power-Assist Locomotor[] 下肢瘫痪 三轴角加速度传感器、足底压力传感器、编 码器 美国 Ekso[5] 截瘫 角度传感器、压力传感器 9 新加坡国立大学 Knee-Ankle-Foot Robot[20] 下肢功能障碍 EMG传感器,角度传感器,力传感器,加速 度传感器 10 美国休斯敦大学 NeuroRex(21] 截瘫 无线64通道EEG电极帽 11 荷兰特文特大学 MindWalker[22] 脊髓损伤 智能干性脑电生理传感器 12 美国杜克大学 Bra-SantosDumont[23] 截瘫 脑机接▣ 13 北京大艾机器人科技有限公司 Ailegs(24] 截瘫 薄膜压力传感器、加速度传感器 14 上海尖叫智能科技公司 Scream One[2s] 残疾人 EMG传感器、力传感器 5 傅里叶智能科技有限公司 Fourier X1[26] 偏瘫 力传感器一、基于脑电信号的大脑皮质活动意图检测 人体的运动意图来源于大脑皮质ꎬ大脑皮质作为运动产 生的最顶层ꎬ既能调整脊髓(中央模式生成器) ꎬ又能调整反射 机制[7] ꎮ 人在行走过程中ꎬ主要由中枢神经系统产生期望的 步态模式ꎬ大脑感知周围环境并根据环境和自身状态做出相 应的模式调整ꎮ 但是大脑皮质同时控制人体多种任务ꎬ研究 人员要从中解码出单一部位的控制指令是非常困难的ꎬ而且 下肢运动产生于人的中枢神经系统ꎬ因此很难直接通过大脑 皮质获得下肢运动信息ꎮ 但是ꎬ大脑在人行走过程中的全局 性规划、运动模式切换等方面具有极大优势ꎬ故在人机系统中 主要用来切换运动模式、改变行走方向等ꎮ 基于大脑皮质的下肢运动控制信号来自于脑 ̄机接口ꎬ 脑 ̄机接口可以将脑电活动转换为运动控制指令并作用于人机 交互控制系统ꎮ 目前ꎬ可用于脑机接口系统的神经电生理信 号主要为 头 皮 脑 电 位 ( electroencephalogramꎬ EEG) [12] ꎮ EEG 信号的获取只需将贴片电极或盘状电极固定于头皮即可采集 大脑的电活动信号ꎬ实时性好ꎬ应用广泛ꎬ获取大脑活动信号 的过程不会对患者造成损害ꎬ且 EEG 信号采集设备技术成熟、 成本低、便携性好ꎬ因此可用于采取大脑皮质信号来获取人的 运动意图ꎬ作为输入信号来调整运动训练参数以及训练策略ꎬ 帮助严重的肢体残疾患者和交流障碍患者实现与康复机器人 间的交流和控制ꎬ提高患者参与康复训练的积极性ꎮ 二、基于肌电信号的外围神经活动检测 人体肌电信号是中枢神经系统支配的肌肉神经控制信 号———动作电位ꎬ其动作电位来源于人体运动神经元ꎬ能够反 映出人体骨骼肌的激活状态ꎻ并且肌电信号大约先于骨骼肌 收缩 100 ms 产生[11] ꎬ能够提前感知肌肉收缩意图ꎮ 因此ꎬ通 过对肌电信号进行活动检测ꎬ可以感知人体运动意图并用于 外骨骼控制ꎮ 目前ꎬ肌电信号广泛应用于临床康复过程中ꎬ用于患者运 动情况下的肌电信号监测、肌肉疲劳估计、肌肉行为预测及运 动识别等ꎮ 基于肌电信号( electromyogramꎬEMG) 的外围神经 活动 检 测 通 常 采 用 表 面 肌 电 信 号 ( surface electromyogramꎬ sEMG)作为信号源ꎬ通过粘贴于人体皮肤表面的一组贴片电 极直接进行无创伤检测ꎬ并经过放大、滤波ꎬ判断出各肌肉的 活动程度ꎬ从而识别出人体下肢的动作模式并控制外骨骼的 运动ꎬ准确性高、无滞后性[31] ꎮ 三、基于传统物理传感器的下肢肢体运动检测 人体下肢肢体的运动主要通过肌肉收缩产生的动力ꎬ牵 拉骨骼产生杠杆运动ꎬ产生关节力矩ꎬ并反映在关节转角等运 动信息上ꎮ 因此下肢肢体运动(关节力矩和位置)感知主要是 通过传统的物理传感器来完成ꎬ包括关节位置传感器ꎬ人机交 互力传感器ꎬ姿态传感器ꎬ足底压力传感器等ꎬ这类传感器通 用性强ꎬ并且具有持续性、稳健性( robutness) 等优势ꎬ能够较 精确地反映人体当前的关节角度、角速度、运动加速度、人机 交互力等运动信息ꎮ 如表 2 所示ꎬ目前常用的运动感知系统主要由关节角度/ 角速度/ 加速度仪、力传感器等物理传感器组成ꎬ然而ꎬ此类传 感器信号稳定性不强ꎬ采集的大多是静态、滞后的运动信 息[27] ꎬ加上信号采集的时间、控制的延迟以及外骨骼存在的 机械延时ꎬ会对外骨骼的实时运动控制造成一定影响ꎬ不利于 人机系统的协调控制ꎮ 相反ꎬ生物信号能够进行超前准确的 运动意图识别和预测ꎬ如脑电信号具有意识超前于具体动作 行为的特点ꎬ可预先完成人体运动方向的判断ꎬ但由于 EEG 的 信噪比较低[28] ꎬ且极易发生变化ꎬ很难直接采用 EEG 信号控 制外骨骼ꎻ肌电信号直接反映人体动作中各肌肉的活动情况ꎬ 可以准确、快速的识别人体下肢动作ꎬ但易受肌肉疲劳程度、 电极贴放位置、皮肤接触程度等因素影响[29] ꎬ使得其应用中 稳健性较差ꎬ而且此方法不适用于运动神经失能患者和肌肉 严重萎缩的重症脑卒中患者ꎮ因此ꎬ我们应根据各感知信号 表 2 典型下肢动力外骨骼运动感知系统 序号 团队 外骨骼名称 适用人群 传感器 1 美国加州大学伯克利分校 BLEEX [1] 士兵 编码器、线性加速度计、六轴力传感器、脚 踏开关、压力传感器、倾斜仪 2 韩国延世大学 Walking assistance lower limb exoskele ̄ ton [16] 下肢瘫痪 角度传感器、力传感器、脚底接触传感器、 倾角仪 3 美国弗洛里达理工学院 Mina [18] 四肢瘫 旋转编码器、直线编码器ꎬ脚底开关 4 日本佐贺大学 Lower limb power assist exoskele ̄ ton [18] 下肢无力 编码器、力传感器、EMG 传感器、激光测距 传感器、足底接触传感器 5 日本神奈川工科大学 power assist robots [19] 护士 电阻式应变压力传感器 6 日本筑波大学 hybrid assistive limb exoskeleton [6] 下肢瘫痪 角度传感器、姿态传感器、足底压力传感 器、EMG 传感器 7 日本名古屋大学 Wearable Power ̄Assist Locomotor [19] 下肢瘫痪 三轴角加速度传感器、足底压力传感器、编 码器 8 美国 Ekso [5] 截瘫 角度传感器、压力传感器 9 新加坡国立大学 Knee ̄Ankle ̄Foot Robot [20] 下肢功能障碍 EMG 传感器ꎬ角度传感器ꎬ力传感器ꎬ加速 度传感器 10 美国休斯敦大学 NeuroRex [21] 截瘫 无线 64 通道 EEG 电极帽 11 荷兰特文特大学 MindWalker [22] 脊髓损伤 智能干性脑电生理传感器 12 美国杜克大学 Bra ̄SantosDumont [23] 截瘫 脑机接口 13 北京大艾机器人科技有限公司 Ailegs [24] 截瘫 薄膜压力传感器、加速度传感器 14 上海尖叫智能科技公司 Scream One [25] 残疾人 EMG 传感器、力传感器 15 傅里叶智能科技有限公司 Fourier X1 [26] 偏瘫 力传感器 84 中华物理医学与康复杂志 2021 年 1 月第 43 卷第 1 期 Chin J Phys Med Rehabilꎬ January 2021ꎬ Vol. 43ꎬ No.1