正在加载图片...
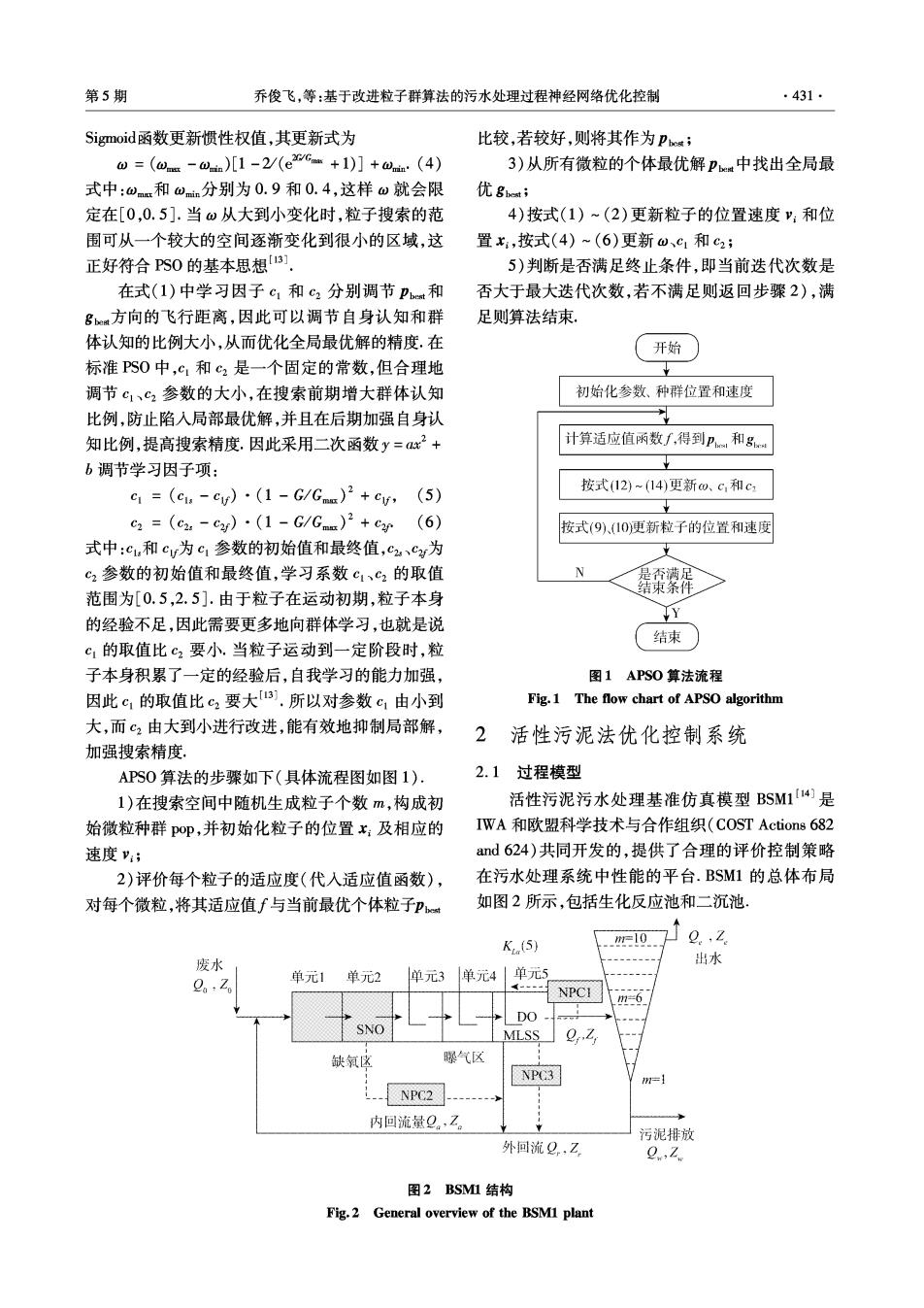
第5期 乔俊飞,等:基于改进粒子群算法的污水处理过程神经网络优化控制 .431 Sigmoid函数更新惯性权值,其更新式为 比较,若较好,则将其作为pe; w=(w-wa)[1-2/(e6m+1]+wa.(4) 3)从所有微粒的个体最优解pe中找出全局最 式中:0mm和wn分别为0.9和0.4,这样w就会限 优gt; 定在[0,0.5].当ω从大到小变化时,粒子搜索的范 4)按式(1)~(2)更新粒子的位置速度':和位 围可从一个较大的空间逐渐变化到很小的区域,这 置x,按式(4)~(6)更新w、c1和c2; 正好符合PS0的基本思想3. 5)判断是否满足终止条件,即当前迭代次数是 在式(I)中学习因子c1和c2分别调节p和 否大于最大迭代次数,若不满足则返回步骤2),满 g方向的飞行距离,因此可以调节自身认知和群 足则算法结束。 体认知的比例大小,从而优化全局最优解的精度.在 开始 标准PS0中,c1和c2是一个固定的常数,但合理地 调节c1、c2参数的大小,在搜索前期增大群体认知 初始化参数、种群位置和速度 比例,防止陷入局部最优解,并且在后期加强自身认 知比例,提高搜索精度.因此采用二次函数y=ax2+ 计算适应值函数f,得到p和8 b调节学习因子项: c1=(c,-cv)·(1-G/Gnm)2+cw,(5) 按式(12)~(14)更新0、c,和c c2=(c2.-c2y)·(1-G/Gm=)2+c2p(6) 按式(9)、(10更新粒子的位置和速度 式中:c,和cy为c1参数的初始值和最终值,c2cr为 c2参数的初始值和最终值,学习系数c1、c2的取值 N 是否满足 范围为[0.5,2.5].由于粒子在运动初期,粒子本身 结束条件 Y 的经验不足,因此需要更多地向群体学习,也就是说 结束 c1的取值比c2要小.当粒子运动到一定阶段时,粒 子本身积累了一定的经验后,自我学习的能力加强, 图1APSO算法流程 因此c,的取值比c,要大.所以对参数c1由小到 Fig.1 The flow chart of APSO algorithm 大,而c2由大到小进行改进,能有效地抑制局部解, 2 活性污泥法优化控制系统 加强搜索精度 APS0算法的步骤如下(具体流程图如图1). 2.1过程模型 1)在搜索空间中随机生成粒子个数m,构成初 活性污泥污水处理基准仿真模型BSM14]是 始微粒种群po叩,并初始化粒子的位置x:及相应的 IWA和欧盟科学技术与合作组织(COST Actions682 速度; and624)共同开发的,提供了合理的评价控制策略 2)评价每个粒子的适应度(代入适应值函数), 在污水处理系统中性能的平台.BSM1的总体布局 对每个微粒,将其适应值∫与当前最优个体粒子pt 如图2所示,包括生化反应池和二沉池 K(5) 。1=10 0.,Z 废水 出水 单元1 单元2 单元3 单元4单元5 通“←一“ NPCI m=6 DO SNO MLSS 2,Z 缺氧这 躁气区 NPC3 =1 NPC2 内回流量9。,Z。 污泥排放 外回流g,Z 0.,Z 图2BSM1结构 Fig.2 General overview of the BSM1 plant