正在加载图片...
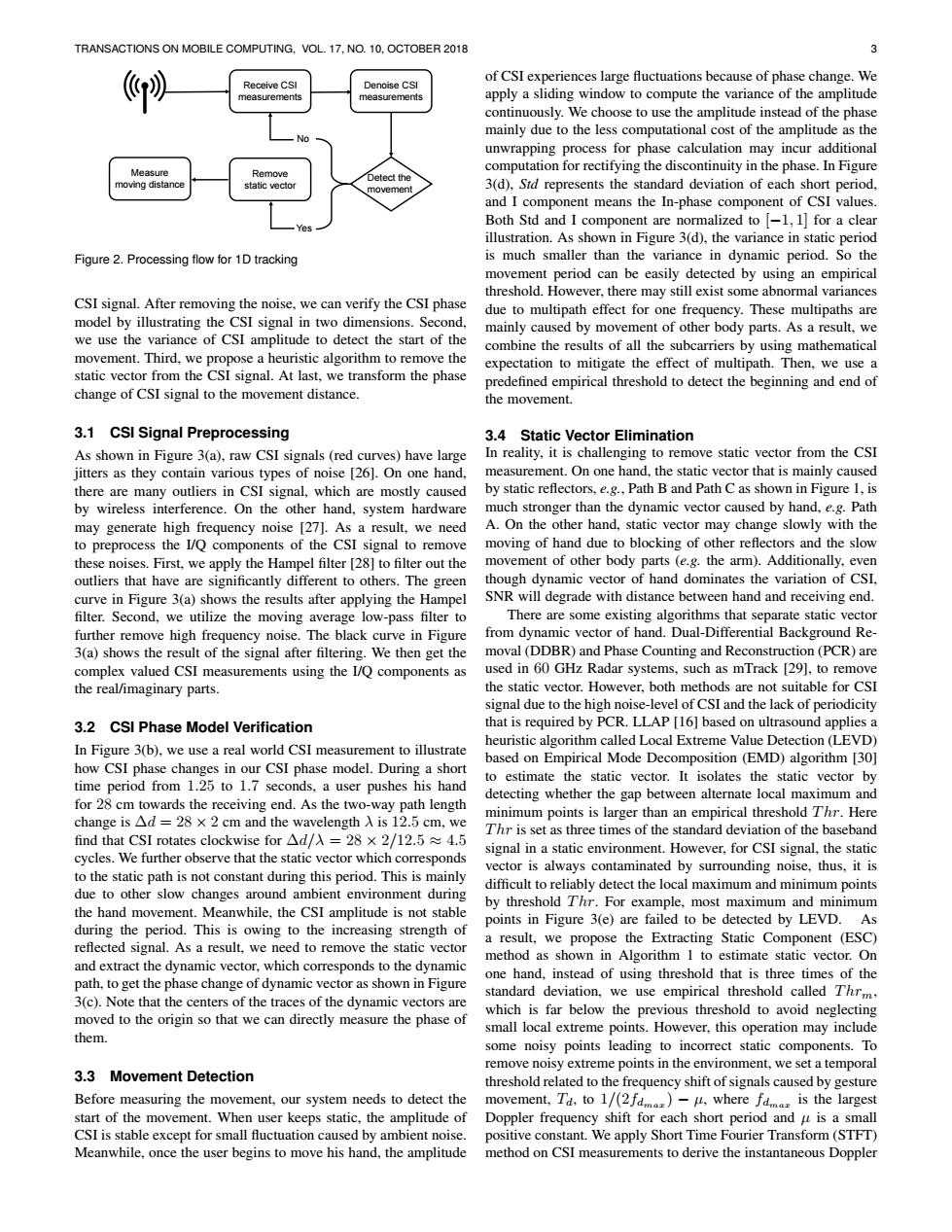
TRANSACTIONS ON MOBILE COMPUTING,VOL.17,NO.10,OCTOBER 2018 3 of CSI experiences large fluctuations because of phase change.We Receive CSI Denoise CSI asurements apply a sliding window to compute the variance of the amplitude continuously.We choose to use the amplitude instead of the phase mainly due to the less computational cost of the amplitude as the unwrapping process for phase calculation may incur additional Measure computation for rectifying the discontinuity in the phase.In Figure Remove Detect the moving distance 3(d).Std represents the standard deviation of each short period, and I component means the In-phase component of CSI values. Both Std and I component are normalized to [-1,1]for a clear illustration.As shown in Figure 3(d),the variance in static period Figure 2.Processing flow for 1D tracking is much smaller than the variance in dynamic period.So the movement period can be easily detected by using an empirical threshold.However,there may still exist some abnormal variances CSI signal.After removing the noise,we can verify the CSI phase due to multipath effect for one frequency.These multipaths are model by illustrating the CSI signal in two dimensions.Second, mainly caused by movement of other body parts.As a result,we we use the variance of CSI amplitude to detect the start of the combine the results of all the subcarriers by using mathematical movement.Third,we propose a heuristic algorithm to remove the expectation to mitigate the effect of multipath.Then,we use a static vector from the CSI signal.At last,we transform the phase predefined empirical threshold to detect the beginning and end of change of CSI signal to the movement distance. the movement. 3.1 CSI Signal Preprocessing 3.4 Static Vector Elimination As shown in Figure 3(a),raw CSI signals(red curves)have large In reality,it is challenging to remove static vector from the CSI jitters as they contain various types of noise [26].On one hand, measurement.On one hand,the static vector that is mainly caused there are many outliers in CSI signal,which are mostly caused by static reflectors,e.g.,Path B and Path C as shown in Figure 1,is by wireless interference.On the other hand,system hardware much stronger than the dynamic vector caused by hand,e.g.Path may generate high frequency noise [27].As a result,we need A.On the other hand,static vector may change slowly with the to preprocess the I/Q components of the CSI signal to remove moving of hand due to blocking of other reflectors and the slow these noises.First,we apply the Hampel filter [28]to filter out the movement of other body parts (e.g.the arm).Additionally,even outliers that have are significantly different to others.The green though dynamic vector of hand dominates the variation of CSI, curve in Figure 3(a)shows the results after applying the Hampel SNR will degrade with distance between hand and receiving end. filter.Second,we utilize the moving average low-pass filter to There are some existing algorithms that separate static vector further remove high frequency noise.The black curve in Figure from dynamic vector of hand.Dual-Differential Background Re- 3(a)shows the result of the signal after filtering.We then get the moval (DDBR)and Phase Counting and Reconstruction(PCR)are complex valued CSI measurements using the I/Q components as used in 60 GHz Radar systems,such as mTrack [29],to remove the real/imaginary parts. the static vector.However,both methods are not suitable for CSI signal due to the high noise-level of CSI and the lack of periodicity 3.2 CSI Phase Model Verification that is required by PCR.LLAP [16]based on ultrasound applies a heuristic algorithm called Local Extreme Value Detection (LEVD) In Figure 3(b).we use a real world CSI measurement to illustrate how CSI phase changes in our CSI phase model.During a short based on Empirical Mode Decomposition (EMD)algorithm [30] to estimate the static vector.It isolates the static vector by time period from 1.25 to 1.7 seconds,a user pushes his hand for 28 cm towards the receiving end.As the two-way path length detecting whether the gap between alternate local maximum and change is△d=28×2 cm and the wavelengthλis12.5cm,we minimum points is larger than an empirical threshold Thr.Here Thr is set as three times of the standard deviation of the baseband find that CSI rotates clockwise for△d/入=28×2/12.5≈4.5 signal in a static environment.However,for CSI signal,the static cycles.We further observe that the static vector which corresponds vector is always contaminated by surrounding noise,thus,it is to the static path is not constant during this period.This is mainly difficult to reliably detect the local maximum and minimum points due to other slow changes around ambient environment during the hand movement.Meanwhile,the CSI amplitude is not stable by threshold Thr.For example,most maximum and minimum points in Figure 3(e)are failed to be detected by LEVD.As during the period.This is owing to the increasing strength of reflected signal.As a result,we need to remove the static vector a result,we propose the Extracting Static Component (ESC) method as shown in Algorithm I to estimate static vector.On and extract the dynamic vector,which corresponds to the dynamic path,to get the phase change of dynamic vector as shown in Figure one hand,instead of using threshold that is three times of the standard deviation,we use empirical threshold called Thrm, 3(c).Note that the centers of the traces of the dynamic vectors are moved to the origin so that we can directly measure the phase of which is far below the previous threshold to avoid neglecting small local extreme points.However,this operation may include them. some noisy points leading to incorrect static components.To remove noisy extreme points in the environment,we set a temporal 3.3 Movement Detection threshold related to the frequency shift of signals caused by gesture Before measuring the movement,our system needs to detect the movement,Ta,to 1/(2fdm)-u,where fd is the largest start of the movement.When user keeps static,the amplitude of Doppler frequency shift for each short period and u is a small CSI is stable except for small fluctuation caused by ambient noise. positive constant.We apply Short Time Fourier Transform(STFT) Meanwhile,once the user begins to move his hand,the amplitude method on CSI measurements to derive the instantaneous DopplerTRANSACTIONS ON MOBILE COMPUTING, VOL. 17, NO. 10, OCTOBER 2018 3 Detect the movement No Yes Remove static vector Measure moving distance Receive CSI measurements Denoise CSI measurements Figure 2. Processing flow for 1D tracking CSI signal. After removing the noise, we can verify the CSI phase model by illustrating the CSI signal in two dimensions. Second, we use the variance of CSI amplitude to detect the start of the movement. Third, we propose a heuristic algorithm to remove the static vector from the CSI signal. At last, we transform the phase change of CSI signal to the movement distance. 3.1 CSI Signal Preprocessing As shown in Figure 3(a), raw CSI signals (red curves) have large jitters as they contain various types of noise [26]. On one hand, there are many outliers in CSI signal, which are mostly caused by wireless interference. On the other hand, system hardware may generate high frequency noise [27]. As a result, we need to preprocess the I/Q components of the CSI signal to remove these noises. First, we apply the Hampel filter [28] to filter out the outliers that have are significantly different to others. The green curve in Figure 3(a) shows the results after applying the Hampel filter. Second, we utilize the moving average low-pass filter to further remove high frequency noise. The black curve in Figure 3(a) shows the result of the signal after filtering. We then get the complex valued CSI measurements using the I/Q components as the real/imaginary parts. 3.2 CSI Phase Model Verification In Figure 3(b), we use a real world CSI measurement to illustrate how CSI phase changes in our CSI phase model. During a short time period from 1.25 to 1.7 seconds, a user pushes his hand for 28 cm towards the receiving end. As the two-way path length change is ∆d = 28 × 2 cm and the wavelength λ is 12.5 cm, we find that CSI rotates clockwise for ∆d/λ = 28 × 2/12.5 ≈ 4.5 cycles. We further observe that the static vector which corresponds to the static path is not constant during this period. This is mainly due to other slow changes around ambient environment during the hand movement. Meanwhile, the CSI amplitude is not stable during the period. This is owing to the increasing strength of reflected signal. As a result, we need to remove the static vector and extract the dynamic vector, which corresponds to the dynamic path, to get the phase change of dynamic vector as shown in Figure 3(c). Note that the centers of the traces of the dynamic vectors are moved to the origin so that we can directly measure the phase of them. 3.3 Movement Detection Before measuring the movement, our system needs to detect the start of the movement. When user keeps static, the amplitude of CSI is stable except for small fluctuation caused by ambient noise. Meanwhile, once the user begins to move his hand, the amplitude of CSI experiences large fluctuations because of phase change. We apply a sliding window to compute the variance of the amplitude continuously. We choose to use the amplitude instead of the phase mainly due to the less computational cost of the amplitude as the unwrapping process for phase calculation may incur additional computation for rectifying the discontinuity in the phase. In Figure 3(d), Std represents the standard deviation of each short period, and I component means the In-phase component of CSI values. Both Std and I component are normalized to [−1, 1] for a clear illustration. As shown in Figure 3(d), the variance in static period is much smaller than the variance in dynamic period. So the movement period can be easily detected by using an empirical threshold. However, there may still exist some abnormal variances due to multipath effect for one frequency. These multipaths are mainly caused by movement of other body parts. As a result, we combine the results of all the subcarriers by using mathematical expectation to mitigate the effect of multipath. Then, we use a predefined empirical threshold to detect the beginning and end of the movement. 3.4 Static Vector Elimination In reality, it is challenging to remove static vector from the CSI measurement. On one hand, the static vector that is mainly caused by static reflectors, e.g., Path B and Path C as shown in Figure 1, is much stronger than the dynamic vector caused by hand, e.g. Path A. On the other hand, static vector may change slowly with the moving of hand due to blocking of other reflectors and the slow movement of other body parts (e.g. the arm). Additionally, even though dynamic vector of hand dominates the variation of CSI, SNR will degrade with distance between hand and receiving end. There are some existing algorithms that separate static vector from dynamic vector of hand. Dual-Differential Background Removal (DDBR) and Phase Counting and Reconstruction (PCR) are used in 60 GHz Radar systems, such as mTrack [29], to remove the static vector. However, both methods are not suitable for CSI signal due to the high noise-level of CSI and the lack of periodicity that is required by PCR. LLAP [16] based on ultrasound applies a heuristic algorithm called Local Extreme Value Detection (LEVD) based on Empirical Mode Decomposition (EMD) algorithm [30] to estimate the static vector. It isolates the static vector by detecting whether the gap between alternate local maximum and minimum points is larger than an empirical threshold T hr. Here T hr is set as three times of the standard deviation of the baseband signal in a static environment. However, for CSI signal, the static vector is always contaminated by surrounding noise, thus, it is difficult to reliably detect the local maximum and minimum points by threshold T hr. For example, most maximum and minimum points in Figure 3(e) are failed to be detected by LEVD. As a result, we propose the Extracting Static Component (ESC) method as shown in Algorithm 1 to estimate static vector. On one hand, instead of using threshold that is three times of the standard deviation, we use empirical threshold called T hrm, which is far below the previous threshold to avoid neglecting small local extreme points. However, this operation may include some noisy points leading to incorrect static components. To remove noisy extreme points in the environment, we set a temporal threshold related to the frequency shift of signals caused by gesture movement, Td, to 1/(2fdmax ) − µ, where fdmax is the largest Doppler frequency shift for each short period and µ is a small positive constant. We apply Short Time Fourier Transform (STFT) method on CSI measurements to derive the instantaneous Doppler