正在加载图片...
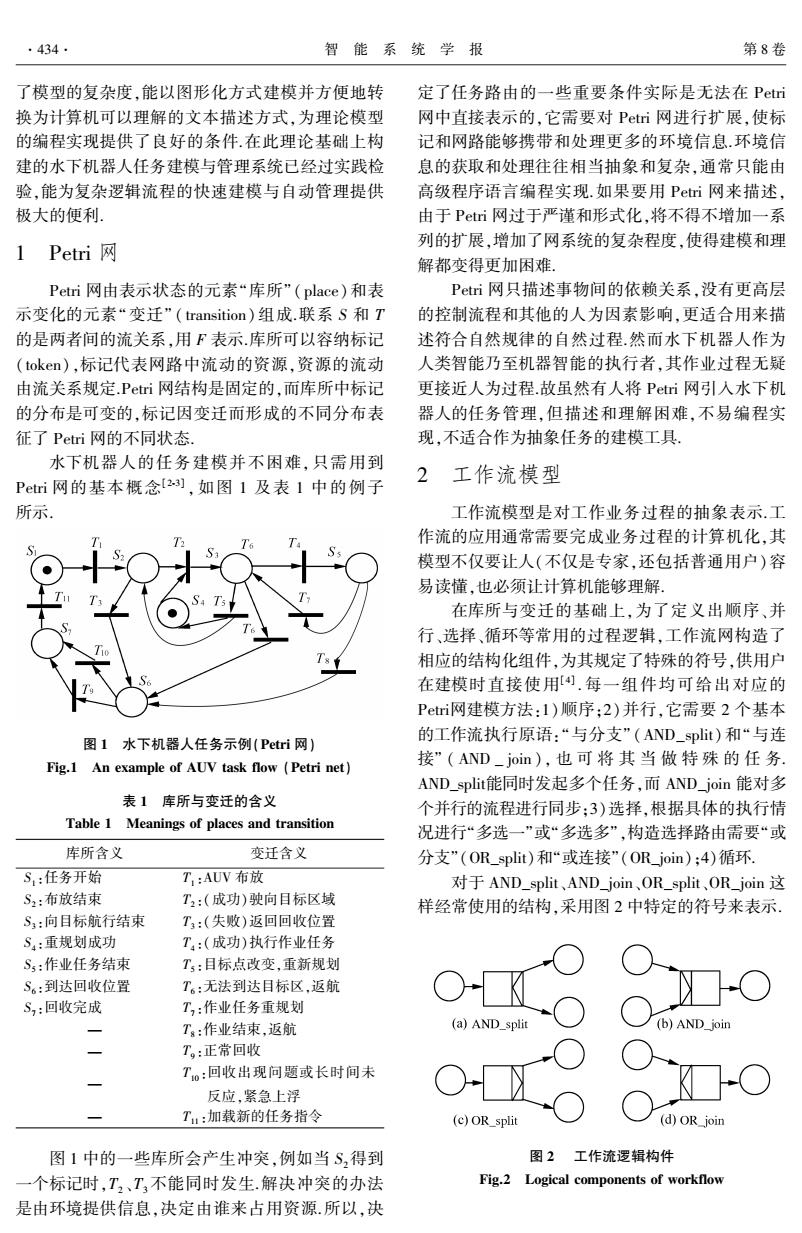
·434· 智能系统学报 第8卷 了模型的复杂度,能以图形化方式建模并方便地转 定了任务路由的一些重要条件实际是无法在Petri 换为计算机可以理解的文本描述方式,为理论模型 网中直接表示的,它需要对Ptmi网进行扩展,使标 的编程实现提供了良好的条件.在此理论基础上构 记和网路能够携带和处理更多的环境信息.环境信 建的水下机器人任务建模与管理系统已经过实践检 息的获取和处理往往相当抽象和复杂,通常只能由 验,能为复杂逻辑流程的快速建模与自动管理提供 高级程序语言编程实现.如果要用Petri网来描述, 极大的便利. 由于Petri网过于严谨和形式化,将不得不增加一系 列的扩展,增加了网系统的复杂程度,使得建模和理 1 Petri网 解都变得更加困难。 Petri网由表示状态的元素“库所”(place)和表 Petri网只描述事物间的依赖关系,没有更高层 示变化的元素“变迁”(transition)组成.联系S和T 的控制流程和其他的人为因素影响,更适合用来描 的是两者间的流关系,用F表示.库所可以容纳标记 述符合自然规律的自然过程.然而水下机器人作为 (token),标记代表网路中流动的资源,资源的流动 人类智能乃至机器智能的执行者,其作业过程无疑 由流关系规定.Petri网结构是固定的,而库所中标记 更接近人为过程.故虽然有人将Petri网引入水下机 的分布是可变的,标记因变迁而形成的不同分布表 器人的任务管理,但描述和理解困难,不易编程实 征了Petri网的不同状态, 现,不适合作为抽象任务的建模工具 水下机器人的任务建模并不困难,只需用到 Petri网的基本概念[3】,如图1及表1中的例子 2工作流模型 所示 工作流模型是对工作业务过程的抽象表示.工 作流的应用通常需要完成业务过程的计算机化,其 模型不仅要让人(不仅是专家,还包括普通用户)容 易读懂,也必须让计算机能够理解。 在库所与变迁的基础上,为了定义出顺序、并 行、选择、循环等常用的过程逻辑,工作流网构造了 相应的结构化组件,为其规定了特殊的符号,供用户 在建模时直接使用[.每一组件均可给出对应的 Peti网建模方法:1)顺序:2)并行,它需要2个基本 图1水下机器人任务示例(Petri网) 的工作流执行原语:“与分支”(AND_split)和“与连 Fig.1 An example of AUV task flow (Petri net) 接”(AND_join),也可将其当做特殊的任务. AND_split能同时发起多个任务,而AND_join能对多 表1库所与变迁的含义 个并行的流程进行同步:3)选择,根据具体的执行情 Table 1 Meanings of places and transition 况进行“多选一”或“多选多”,构造选择路由需要“或 库所含义 变迁含义 分支”(OR_split)和“或连接”(OR_join):4)循环. S:任务开始 T,:AUV布放 对于AND_split、AND_join、OR_split、OR_join这 S2:布放结束 T2:(成功)驶向目标区域 样经常使用的结构,采用图2中特定的符号来表示. S:向目标航行结束 T3:(失败)返回回收位置 S4:重规划成功 T,:(成功)执行作业任务 S:作业任务结束 T,:目标点改变,重新规划 S。:到达回收位置 T。:无法到达目标区,返航 S,:回收完成 T,:作业任务重规划 T,:作业结束,返航 T,:正常回收 T。:回收出现问题或长时间未 反应,紧急上浮 T:加载新的任务指令 图1中的一些库所会产生冲突,例如当S,得到 图2工作流逻辑构件 一个标记时,T2、T,不能同时发生.解决冲突的办法 Fig.2 Logical components of workflow 是由环境提供信息,决定由谁来占用资源所以,决了模型的复杂度ꎬ能以图形化方式建模并方便地转 换为计算机可以理解的文本描述方式ꎬ为理论模型 的编程实现提供了良好的条件.在此理论基础上构 建的水下机器人任务建模与管理系统已经过实践检 验ꎬ能为复杂逻辑流程的快速建模与自动管理提供 极大的便利. 1 Petri 网 Petri 网由表示状态的元素“库所” (place)和表 示变化的元素“变迁” ( transition) 组成.联系 S 和 T 的是两者间的流关系ꎬ用 F 表示.库所可以容纳标记 (token)ꎬ标记代表网路中流动的资源ꎬ资源的流动 由流关系规定.Petri 网结构是固定的ꎬ而库所中标记 的分布是可变的ꎬ标记因变迁而形成的不同分布表 征了 Petri 网的不同状态. 水下机器人的任务建模并不困难ꎬ只需用到 Petri 网的基本概念[2 ̄3] ꎬ如图 1 及表 1 中的例子 所示. 图 1 水下机器人任务示例(Petri 网) Fig.1 An example of AUV task flow (Petri net) 表 1 库所与变迁的含义 Table 1 Meanings of places and transition 库所含义 变迁含义 S1 :任务开始 T1 :AUV 布放 S2 :布放结束 T2 :(成功)驶向目标区域 S3 :向目标航行结束 T3 :(失败)返回回收位置 S4 :重规划成功 T4 :(成功)执行作业任务 S5 :作业任务结束 T5 :目标点改变ꎬ重新规划 S6 :到达回收位置 T6 :无法到达目标区ꎬ返航 S7 :回收完成 T7 :作业任务重规划 — T8 :作业结束ꎬ返航 — T9 :正常回收 — T10 :回收出现问题或长时间未 反应ꎬ紧急上浮 — T11 :加载新的任务指令 图 1 中的一些库所会产生冲突ꎬ例如当 S2得到 一个标记时ꎬT2 、T3不能同时发生.解决冲突的办法 是由环境提供信息ꎬ决定由谁来占用资源.所以ꎬ决 定了任务路由的一些重要条件实际是无法在 Petri 网中直接表示的ꎬ它需要对 Petri 网进行扩展ꎬ使标 记和网路能够携带和处理更多的环境信息.环境信 息的获取和处理往往相当抽象和复杂ꎬ通常只能由 高级程序语言编程实现.如果要用 Petri 网来描述ꎬ 由于 Petri 网过于严谨和形式化ꎬ将不得不增加一系 列的扩展ꎬ增加了网系统的复杂程度ꎬ使得建模和理 解都变得更加困难. Petri 网只描述事物间的依赖关系ꎬ没有更高层 的控制流程和其他的人为因素影响ꎬ更适合用来描 述符合自然规律的自然过程.然而水下机器人作为 人类智能乃至机器智能的执行者ꎬ其作业过程无疑 更接近人为过程.故虽然有人将 Petri 网引入水下机 器人的任务管理ꎬ但描述和理解困难ꎬ不易编程实 现ꎬ不适合作为抽象任务的建模工具. 2 工作流模型 工作流模型是对工作业务过程的抽象表示.工 作流的应用通常需要完成业务过程的计算机化ꎬ其 模型不仅要让人(不仅是专家ꎬ还包括普通用户)容 易读懂ꎬ也必须让计算机能够理解. 在库所与变迁的基础上ꎬ为了定义出顺序、并 行、选择、循环等常用的过程逻辑ꎬ工作流网构造了 相应的结构化组件ꎬ为其规定了特殊的符号ꎬ供用户 在建模时直接使用[4] . 每一组件均可给出对应的 Petri网建模方法:1)顺序ꎻ2)并行ꎬ它需要 2 个基本 的工作流执行原语:“与分支” (AND_split)和“与连 接” ( AND _ join )ꎬ 也 可 将 其 当 做 特 殊 的 任 务. AND_split能同时发起多个任务ꎬ而 AND_join 能对多 个并行的流程进行同步ꎻ3)选择ꎬ根据具体的执行情 况进行“多选一”或“多选多”ꎬ构造选择路由需要“或 分支”(OR_split)和“或连接”(OR_join)ꎻ4)循环. 对于 AND_split、AND_join、OR_split、OR_join 这 样经常使用的结构ꎬ采用图 2 中特定的符号来表示. 图 2 工作流逻辑构件 Fig.2 Logical components of workflow 434 智 能 系 统 学 报 第 8 卷