正在加载图片...
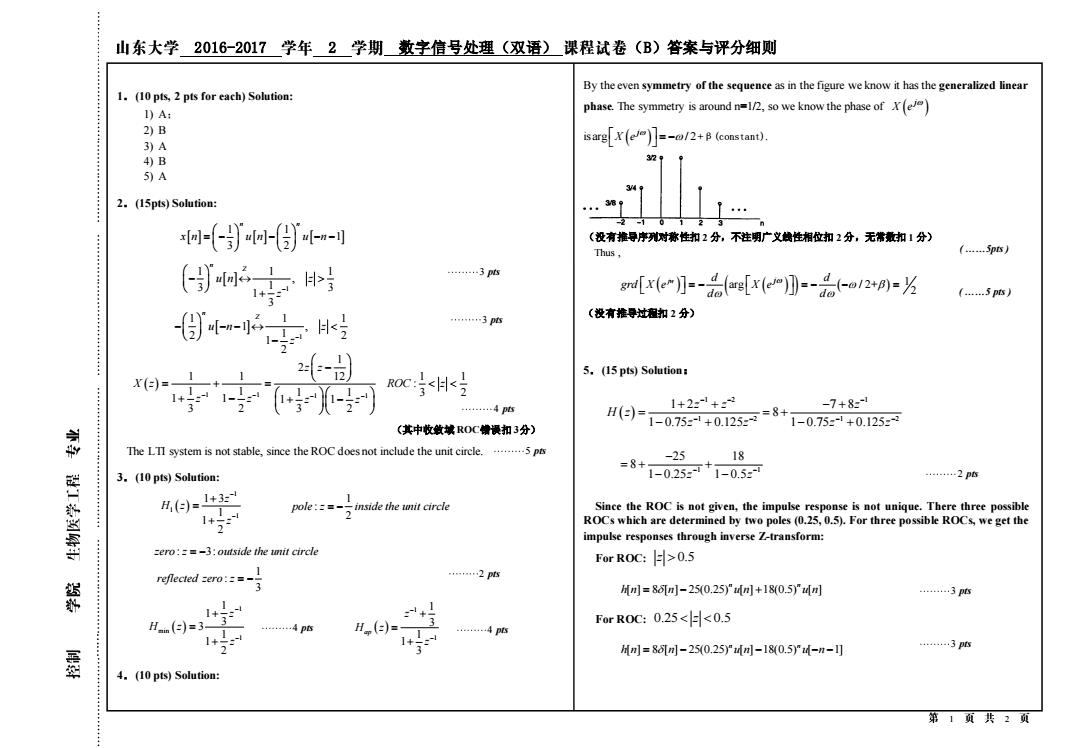
山东大学2016-2017学年2学期数字信号处理(双语)课程试卷(B)答案与评分细则 By the even symmetry of the sequence as in the figure we know it has the generalized linear 1.(10 pts,2 pts for each)Solution: 1)A: phase.The symmetry is aroundso we know the phase of) 2)B 3)A isarg()=-/2+B (constant). 4)B 37 5)A 2.(15pts)Solution: (--可 (没有推每序列对称性扣2分,不注明广义编性相位扣2分,无常数扣1分) Thus, (.5pi) …3pi gn[xe小-e[xe】=-品-o2*-h (5pi) - s (没有推导过粗扣2分) 5.(15 pts)Solution: Roc:子对 4 1+2z1+2 -7+8= (其中收敏域R0C铺损扣3分) H(9)-1-0752-+0.25✉=8+ -0.75-+0.1252-2 The LTI system is not stable,since the ROC does not include the unit circle. …5pb =8+ -25 18 3.(10 pts)Solution: +1-0.252+1-0.5z 2p昨 H,=1+3 poleinside the ctrcle Since the ROC is not given,the impulse response is not unique.There three possible ROCs which are determined by two poles(0.25,0.5).For three possible ROCs,we get the impulse responses through inverse Z-transform: zero:=-3:outside the unit circle For ROC:>0.5 器 reflected sero:== 2p店 Mn=86mj-250.25)°+180.5)”4可 1+互 Hm(e)=3 ForR0C:0.25<H<0.5 1+一 Mn=86同-250.25)y°)-180.5)°-n- …3p 4.(10 pts)Solution: 第1页共2页2016-2017 2 数字信号处理(双语) (B)答案与评分细则 1 2 1.(10 pts, 2 pts for each) Solution: 1) A; 2) B 3) A 4) B 5) A 2.(15pts) Solution: The LTI system is not stable, since the ROC does not include the unit circle. 3.(10 pts) Solution: 4.(10 pts) Solution: By the even symmetry of the sequence as in the figure we know it has the generalized linear phase. The symmetry is around n=1/2, so we know the phase of ( ) j X e is arg / 2 ( ) j X e = − +β(constant). (没有推导序列对称性扣 2 分,不注明广义线性相位扣 2 分,无常数扣 1 分) Thus , (没有推导过程扣 2 分) 5.(15 pts) Solution: Since the ROC is not given, the impulse response is not unique. There three possible ROCs which are determined by two poles (0.25, 0.5). For three possible ROCs, we get the impulse responses through inverse Z-transform: For ROC: z 0.5 [ ] 8 [ ] 25(0.25) [ ] 18(0.5) [ ] n n h n n u n u n = − + For ROC: 0.25 0.5 z [ ] 8 [ ] 25(0.25) [ ] 18(0.5) [ 1] n n h n n u n u n = − − − − ( ) 1 1 1 1 1 2 1 1 1 1 12 : 1 1 1 1 3 2 1 1 1 1 3 2 3 2 z z X z ROC z z z z z − − − − − = + = + − + − 1 1 1 3 2 = − − − − n n x n u n u n 1 1 1 1 , 3 3 1 1 3 − − + n Z u n z z 1 1 1 1 1 , 2 2 1 1 2 − − − − − n Z u n z z 4 pts 3 pts 3 pts ( ) 1 1 1 1 3 1 1 2 − − + = + z H z z 1 : 2 pole z inside the unit circle = − zero z outside the unit circle : 3: = − 1 : 3 reflected zero z = − ( ) 1 1 1 3 1 1 3 − − + = + ap z H z z ( ) 1 min 1 1 1 3 3 1 1 2 − − + = + z H z z 2 pts 4 pts 4 pts ( ) ( ( ) ) ( ) arg / 2+ 1 2 jw d d j grd X e X e d d = − = − − = ( ……5pts ) ( ……5 pts ) 5 pts ( ) 1 2 1 1 2 1 2 1 2 7 8 8 1 0.75 0.125 1 0.75 0.125 z z z H z z z z z − − − − − − − + + − + = = + − + − + 2 pts 1 1 25 18 8 1 0.25 1 0.5 z z − − − = + + − − (其中收敛域 ROC错误扣 3分) 3 pts 3 pts