正在加载图片...
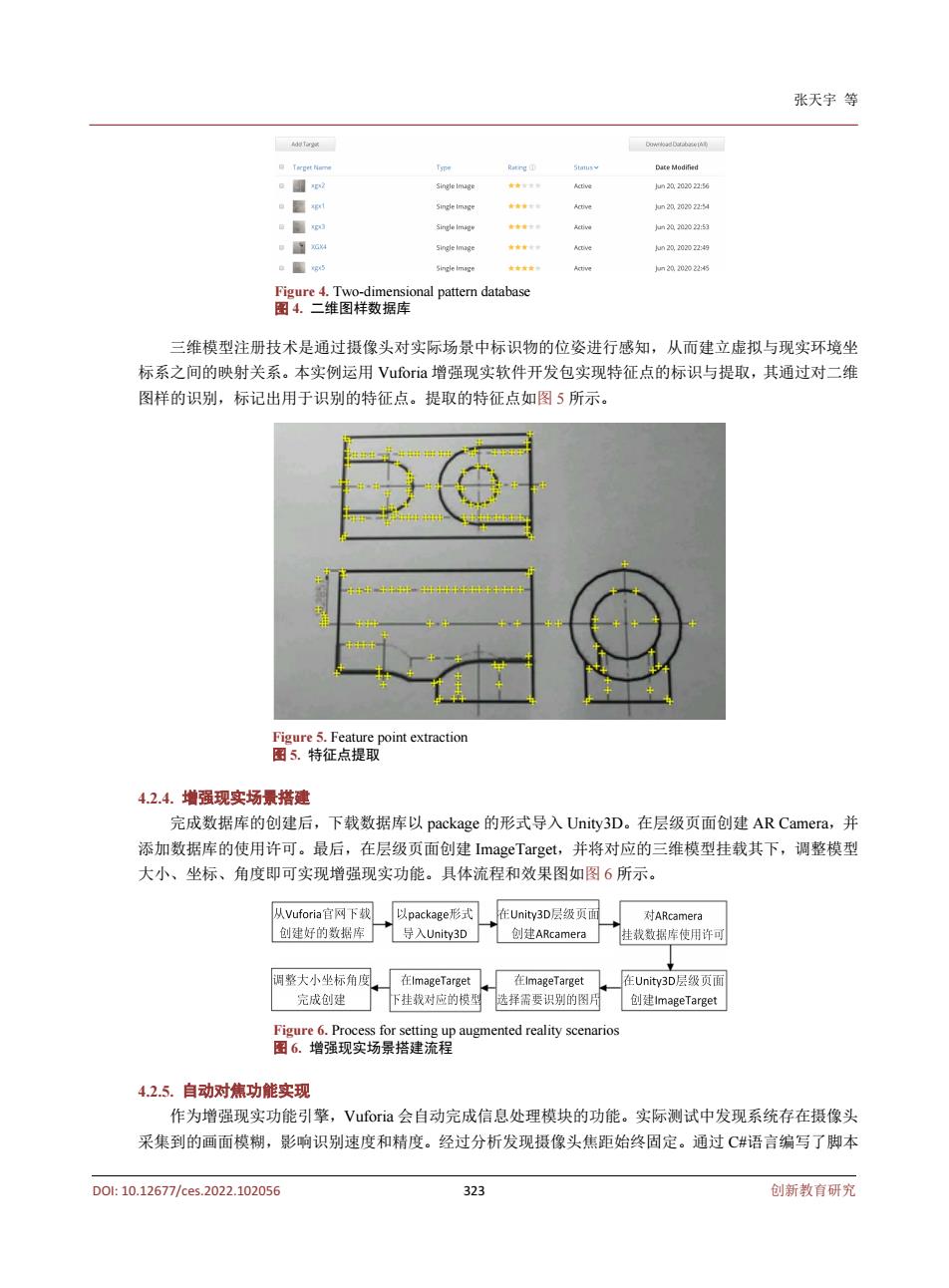
张天宇等 Ada Targ DuwnloadDorabtA Terget Namme Rtrg① Status Dare Modifed e■2 Single Image n2020202-56 u园 Single image 女南金年 un2效202022:4 图阳 Single Imige 女t立 Activ M20202022:53 g】G划 Single image 女★有行 Acove n20,20202249 国g5 Single image 女★古有 Active m2020202245 Figure 4.Two-dimensional pattern database 图4.二维图样数据库 三维模型注册技术是通过摄像头对实际场景中标识物的位姿进行感知,从而建立虚拟与现实环境坐 标系之间的映射关系。本实例运用Vuforia增强现实软件开发包实现特征点的标识与提取,其通过对二维 图样的识别,标记出用于识别的特征点。提取的特征点如图5所示。 Figure 5.Feature point extraction 图5.特征点提取 4.2.4.增强现实场景搭建 完成数据库的创建后,下载数据库以package的形式导入Unity3D。在层级页面创建AR Camera,并 添加数据库的使用许可。最后,在层级页面创建ImageTarget,并将对应的三维模型挂载其下,调整模型 大小、坐标、角度即可实现增强现实功能。具体流程和效果图如图6所示。 从Vuforia官网下载 以package形式 在Unity.3D层级页面 对ARcamera 创建好的数据库 导入Jnity:3D 创建ARcamera 挂找数据库使用许可 调整大小坐标角度 在ImageTarget 在ImageTarget 在Unity.3D层级页面 完成创建 下挂载对应的模型 选择需要识别的图月 创建ImageTarget Figure 6.Process for setting up augmented reality scenarios 图6.增强现实场景搭建流程 4.2.5.自动对焦功能实现 作为增强现实功能引擎,Vuforia会自动完成信息处理模块的功能。实际测试中发现系统存在摄像头 采集到的画面模糊,影响识别速度和精度。经过分析发现摄像头焦距始终固定。通过C#语言编写了脚本 D0:10.12677/ces.2022.102056 323 创新教有研究张天宇 等 DOI: 10.12677/ces.2022.102056 323 创新教育研究 Figure 4. Two-dimensional pattern database 图 4. 二维图样数据库 三维模型注册技术是通过摄像头对实际场景中标识物的位姿进行感知,从而建立虚拟与现实环境坐 标系之间的映射关系。本实例运用 Vuforia 增强现实软件开发包实现特征点的标识与提取,其通过对二维 图样的识别,标记出用于识别的特征点。提取的特征点如图 5 所示。 Figure 5. Feature point extraction 图 5. 特征点提取 4.2.4. 增强现实场景搭建 完成数据库的创建后,下载数据库以 package 的形式导入 Unity3D。在层级页面创建 AR Camera,并 添加数据库的使用许可。最后,在层级页面创建 ImageTarget,并将对应的三维模型挂载其下,调整模型 大小、坐标、角度即可实现增强现实功能。具体流程和效果图如图 6 所示。 Figure 6. Process for setting up augmented reality scenarios 图 6. 增强现实场景搭建流程 4.2.5. 自动对焦功能实现 作为增强现实功能引擎,Vuforia 会自动完成信息处理模块的功能。实际测试中发现系统存在摄像头 采集到的画面模糊,影响识别速度和精度。经过分析发现摄像头焦距始终固定。通过 C#语言编写了脚本