正在加载图片...
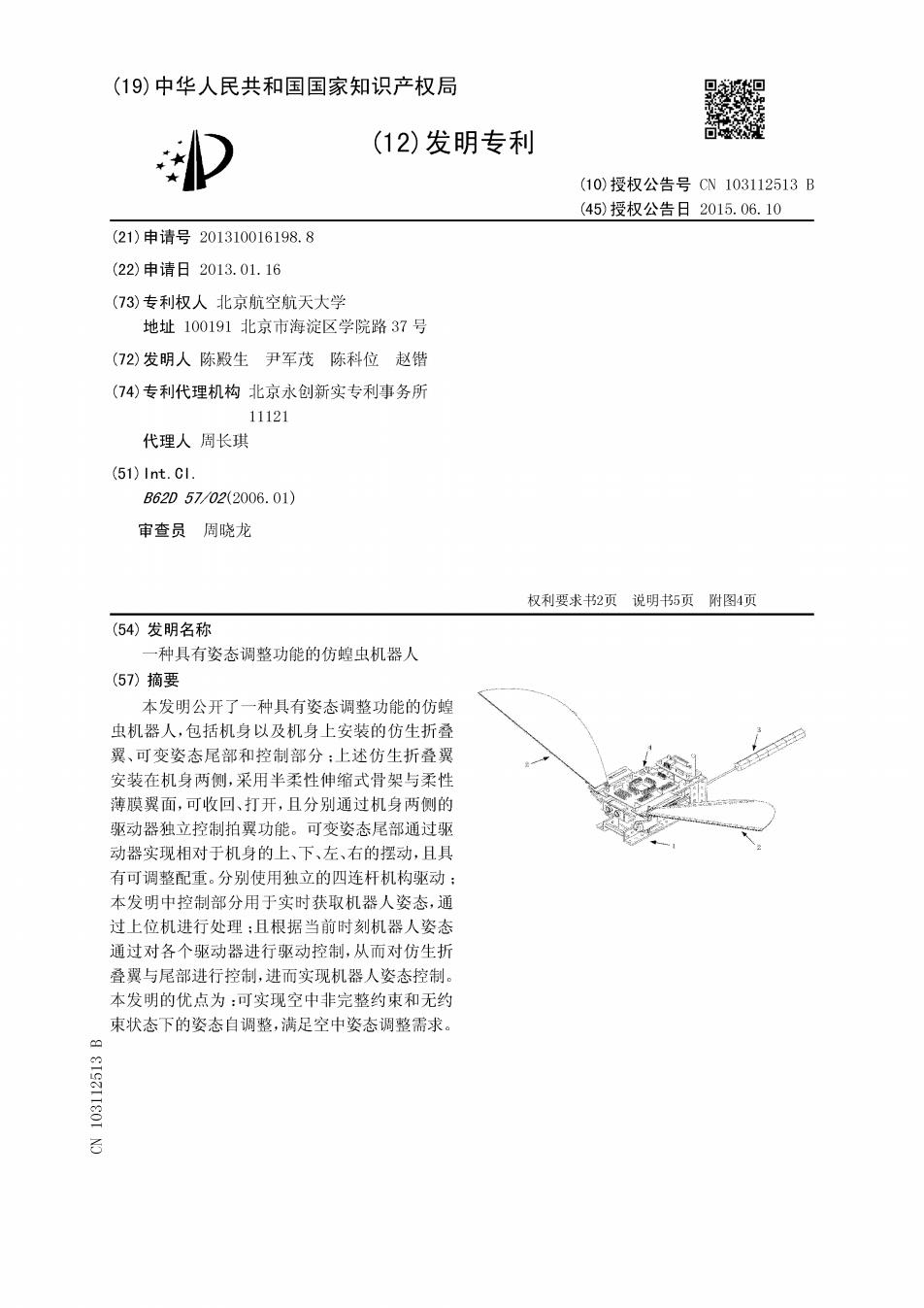
(19)中华人民共和国国家知识产权局 (12)发明专利 ■ (10)授权公告号CN103112513B (45)授权公告日2015.06.10 (21)申请号201310016198.8 (22)申请日2013.01.16 (73)专利权人北京航空航天大学 地址100191北京市海淀区学院路37号 (72)发明人陈殿生尹军茂陈科位赵锴 (74)专利代理机构北京永创新实专利事务所 11121 代理人周长琪 (51)1nt.Cl. B62D57/02(2006.01) 审查员周晓龙 权利要求书2页说明书5页附图4页 (54)发明名称 一种具有姿态调整功能的仿蝗虫机器人 (57)摘要 本发明公开了一种具有姿态调整功能的仿蝗 虫机器人,包括机身以及机身上安装的仿生折叠 翼、可变姿态尾部和控制部分:上述仿生折叠翼 安装在机身两侧,采用半柔性伸缩式骨架与柔性 薄膜翼面,可收回、打开,且分别通过机身两侧的 驱动器独立控制拍翼功能。可变姿态尾部通过驱 动器实现相对于机身的上、下、左、右的摆动,且具 有可调整配重。分别使用独立的四连杆机构驱动: 本发明中控制部分用于实时获取机器人姿态,通 过上位机进行处理:且根据当前时刻机器人姿态 通过对各个驱动器进行驱动控制,从而对仿生折 叠翼与尾部进行控制,进而实现机器人姿态控制。 本发明的优点为:可实现空中非完整约束和无约 束状态下的姿态自调整,满足空中姿态调整需求