正在加载图片...
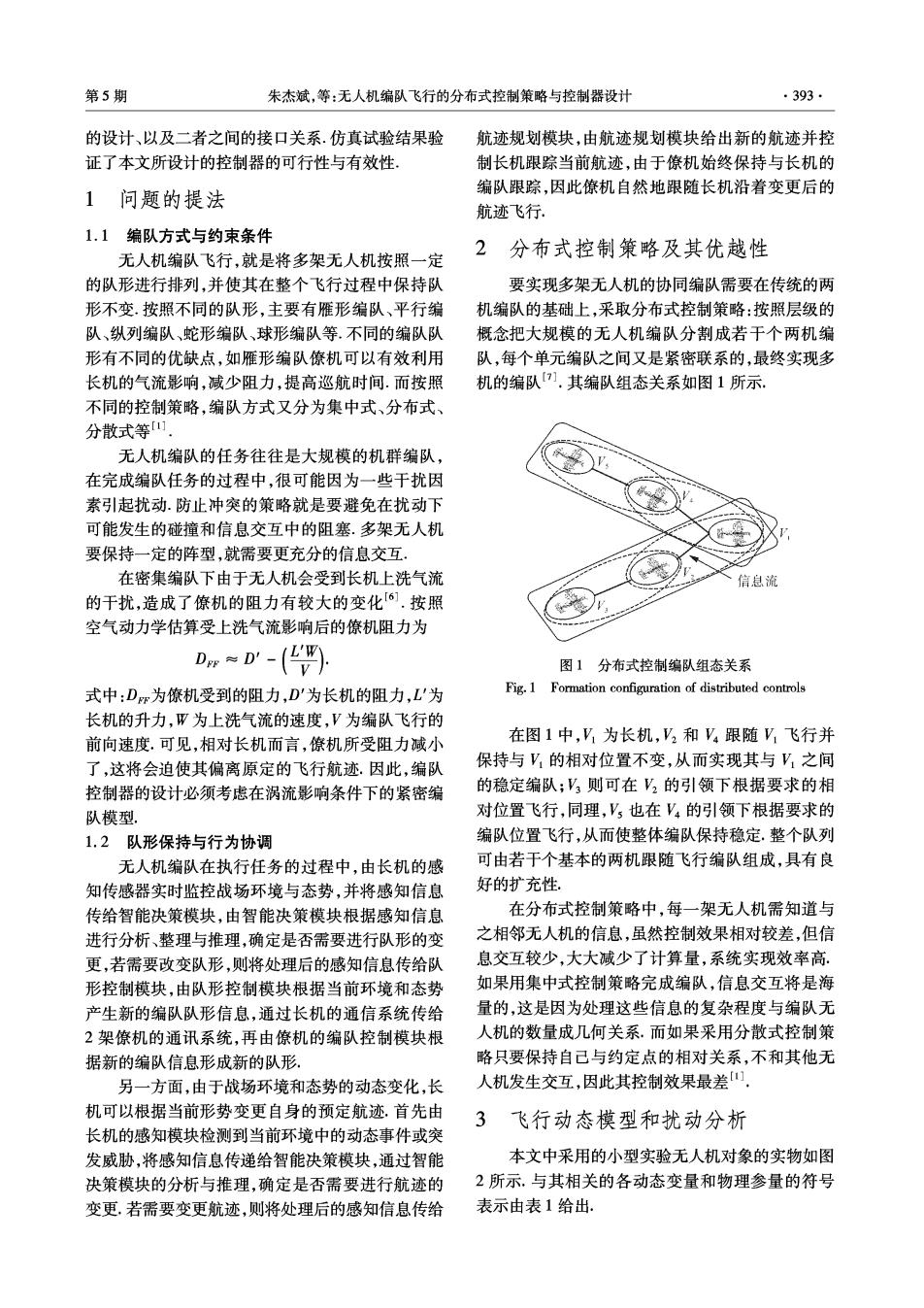
第5期 朱杰斌,等:无人机编队飞行的分布式控制策略与控制器设计 ·393· 的设计、以及二者之间的接口关系.仿真试验结果验 航迹规划模块,由航迹规划模块给出新的航迹并控 证了本文所设计的控制器的可行性与有效性。 制长机跟踪当前航迹,由于僚机始终保持与长机的 编队跟踪,因此僚机自然地跟随长机沿着变更后的 1 问题的提法 航迹飞行 1.1编队方式与约束条件 无人机编队飞行,就是将多架无人机按照一定 2分布式控制策略及其优越性 的队形进行排列,并使其在整个飞行过程中保持队 要实现多架无人机的协同编队需要在传统的两 形不变.按照不同的队形,主要有雁形编队、平行编 机编队的基础上,采取分布式控制策略:按照层级的 队、纵列编队、蛇形编队、球形编队等.不同的编队队 概念把大规模的无人机编队分割成若干个两机编 形有不同的优缺点,如雁形编队僚机可以有效利用 队,每个单元编队之间又是紧密联系的,最终实现多 长机的气流影响,减少阻力,提高巡航时间.而按照 机的编队).其编队组态关系如图1所示 不同的控制策略,编队方式又分为集中式、分布式、 分散式等山 无人机编队的任务往往是大规模的机群编队, 在完成编队任务的过程中,很可能因为一些干扰因 素引起扰动.防止冲突的策略就是要避免在扰动下 可能发生的碰撞和信息交互中的阻塞.多架无人机 要保持一定的阵型,就需要更充分的信息交互: 在密集编队下由于无人机会受到长机上洗气流 信息流 的干扰,造成了僚机的阻力有较大的变化[6.按照 空气动力学估算受上洗气流影响后的僚机阻力为 DnD- 图1分布式控制编队组态关系 式中:Dx为僚机受到的阻力,D'为长机的阻力,L'为 Fig.1 Formation configuration of distributed controls 长机的升力,W为上洗气流的速度,V为编队飞行的 前向速度.可见,相对长机而言,僚机所受阻力减小 在图1中,V,为长机,V2和V4跟随V,飞行并 了,这将会迫使其偏离原定的飞行航迹.因此,编队 保持与V,的相对位置不变,从而实现其与V1之间 控制器的设计必须考虑在涡流影响条件下的紧密编 的稳定编队;V,则可在V2的引领下根据要求的相 队模型。 对位置飞行,同理,V,也在V4的引领下根据要求的 1.2队形保持与行为协调 编队位置飞行,从而使整体编队保持稳定.整个队列 无人机编队在执行任务的过程中,由长机的感 可由若于个基本的两机跟随飞行编队组成,具有良 知传感器实时监控战场环境与态势,并将感知信息 好的扩充性。 传给智能决策模块,由智能决策模块根据感知信息 在分布式控制策略中,每一架无人机需知道与 进行分析、整理与推理,确定是否需要进行队形的变 之相邻无人机的信息,虽然控制效果相对较差,但信 更,若需要改变队形,则将处理后的感知信息传给队 息交互较少,大大减少了计算量,系统实现效率高 形控制模块,由队形控制模块根据当前环境和态势 如果用集中式控制策略完成编队,信息交互将是海 产生新的编队队形信息,通过长机的通信系统传给 量的,这是因为处理这些信息的复杂程度与编队无 2架僚机的通讯系统,再由僚机的编队控制模块根 人机的数量成几何关系.而如果采用分散式控制策 据新的编队信息形成新的队形. 略只要保持自己与约定点的相对关系,不和其他无 另一方面,由于战场环境和态势的动态变化,长 人机发生交互,因此其控制效果最差们 机可以根据当前形势变更自身的预定航迹.首先由 3飞行动态模型和扰动分析 长机的感知模块检测到当前环境中的动态事件或突 发威胁,将感知信息传递给智能决策模块,通过智能 本文中采用的小型实验无人机对象的实物如图 决策模块的分析与推理,确定是否需要进行航迹的 2所示.与其相关的各动态变量和物理参量的符号 变更,若需要变更航迹,则将处理后的感知信息传给 表示由表1给出