正在加载图片...
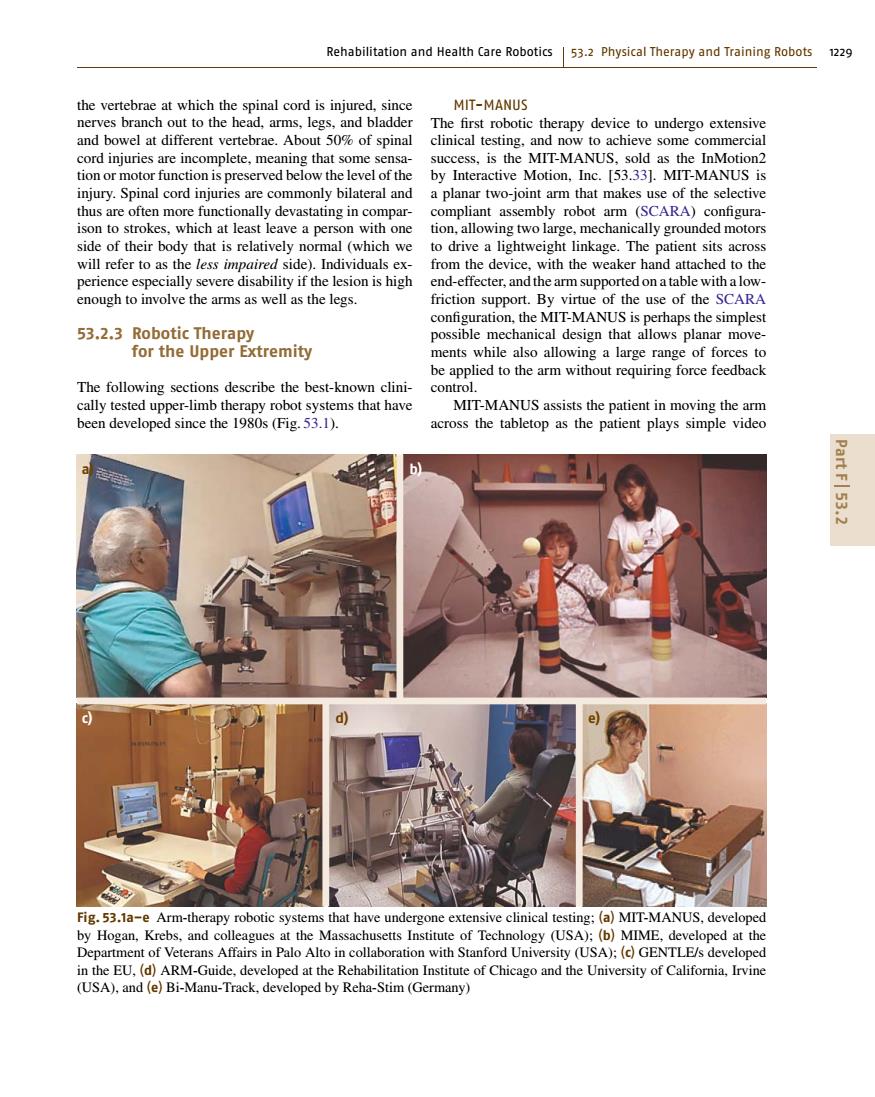
Rehabilitation and Health Care Robotics 53.2 Physical Therapy and Training Robots 1229 the vertebrae at which the spinal cord is injured,since MIT-MANUS nerves branch out to the head,arms,legs,and bladder The first robotic therapy device to undergo extensive and bowel at different vertebrae.About 50%of spinal clinical testing,and now to achieve some commercial cord injuries are incomplete,meaning that some sensa- success,is the MIT-MANUS,sold as the InMotion2 tion or motor function is preserved below the level of the by Interactive Motion,Inc.[53.33].MIT-MANUS is injury.Spinal cord injuries are commonly bilateral and a planar two-joint arm that makes use of the selective thus are often more functionally devastating in compar-compliant assembly robot arm (SCARA)configura- ison to strokes,which at least leave a person with one tion,allowing two large,mechanically grounded motors side of their body that is relatively normal(which we to drive a lightweight linkage.The patient sits across will refer to as the less impaired side).Individuals ex- from the device,with the weaker hand attached to the perience especially severe disability if the lesion is high end-effecter,and the arm supported on a table with a low- enough to involve the arms as well as the legs. friction support.By virtue of the use of the SCARA configuration,the MIT-MANUS is perhaps the simplest 53.2.3 Robotic Therapy possible mechanical design that allows planar move- for the Upper Extremity ments while also allowing a large range of forces to be applied to the arm without requiring force feedback The following sections describe the best-known clini- control. cally tested upper-limb therapy robot systems that have MIT-MANUS assists the patient in moving the arm been developed since the 1980s(Fig.53.1). across the tabletop as the patient plays simple video Part F 53.2 Fig.53.1a-e Arm-therapy robotic systems that have undergone extensive clinical testing;(a)MIT-MANUS,developed by Hogan,Krebs,and colleagues at the Massachusetts Institute of Technology (USA);(b)MIME,developed at the Department of Veterans Affairs in Palo Alto in collaboration with Stanford University (USA);(c)GENTLE/s developed in the EU,(d)ARM-Guide,developed at the Rehabilitation Institute of Chicago and the University of California,Irvine (USA),and (e)Bi-Manu-Track,developed by Reha-Stim(Germany)Rehabilitation and Health Care Robotics 53.2 Physical Therapy and Training Robots 1229 the vertebrae at which the spinal cord is injured, since nerves branch out to the head, arms, legs, and bladder and bowel at different vertebrae. About 50% of spinal cord injuries are incomplete, meaning that some sensation or motor function is preserved below the level of the injury. Spinal cord injuries are commonly bilateral and thus are often more functionally devastating in comparison to strokes, which at least leave a person with one side of their body that is relatively normal (which we will refer to as the less impaired side). Individuals experience especially severe disability if the lesion is high enough to involve the arms as well as the legs. 53.2.3 Robotic Therapy for the Upper Extremity The following sections describe the best-known clinically tested upper-limb therapy robot systems that have been developed since the 1980s (Fig. 53.1). a) b) c) d) e) Fig. 53.1a–e Arm-therapy robotic systems that have undergone extensive clinical testing; (a) MIT-MANUS, developed by Hogan, Krebs, and colleagues at the Massachusetts Institute of Technology (USA); (b) MIME, developed at the Department of Veterans Affairs in Palo Alto in collaboration with Stanford University (USA); (c) GENTLE/s developed in the EU, (d) ARM-Guide, developed at the Rehabilitation Institute of Chicago and the University of California, Irvine (USA), and (e) Bi-Manu-Track, developed by Reha-Stim (Germany) MIT-MANUS The first robotic therapy device to undergo extensive clinical testing, and now to achieve some commercial success, is the MIT-MANUS, sold as the InMotion2 by Interactive Motion, Inc. [53.33]. MIT-MANUS is a planar two-joint arm that makes use of the selective compliant assembly robot arm (SCARA) configuration, allowing two large, mechanically grounded motors to drive a lightweight linkage. The patient sits across from the device, with the weaker hand attached to the end-effecter, and the arm supported on a table with a lowfriction support. By virtue of the use of the SCARA configuration, the MIT-MANUS is perhaps the simplest possible mechanical design that allows planar movements while also allowing a large range of forces to be applied to the arm without requiring force feedback control. MIT-MANUS assists the patient in moving the arm across the tabletop as the patient plays simple video Part F 53.2