正在加载图片...
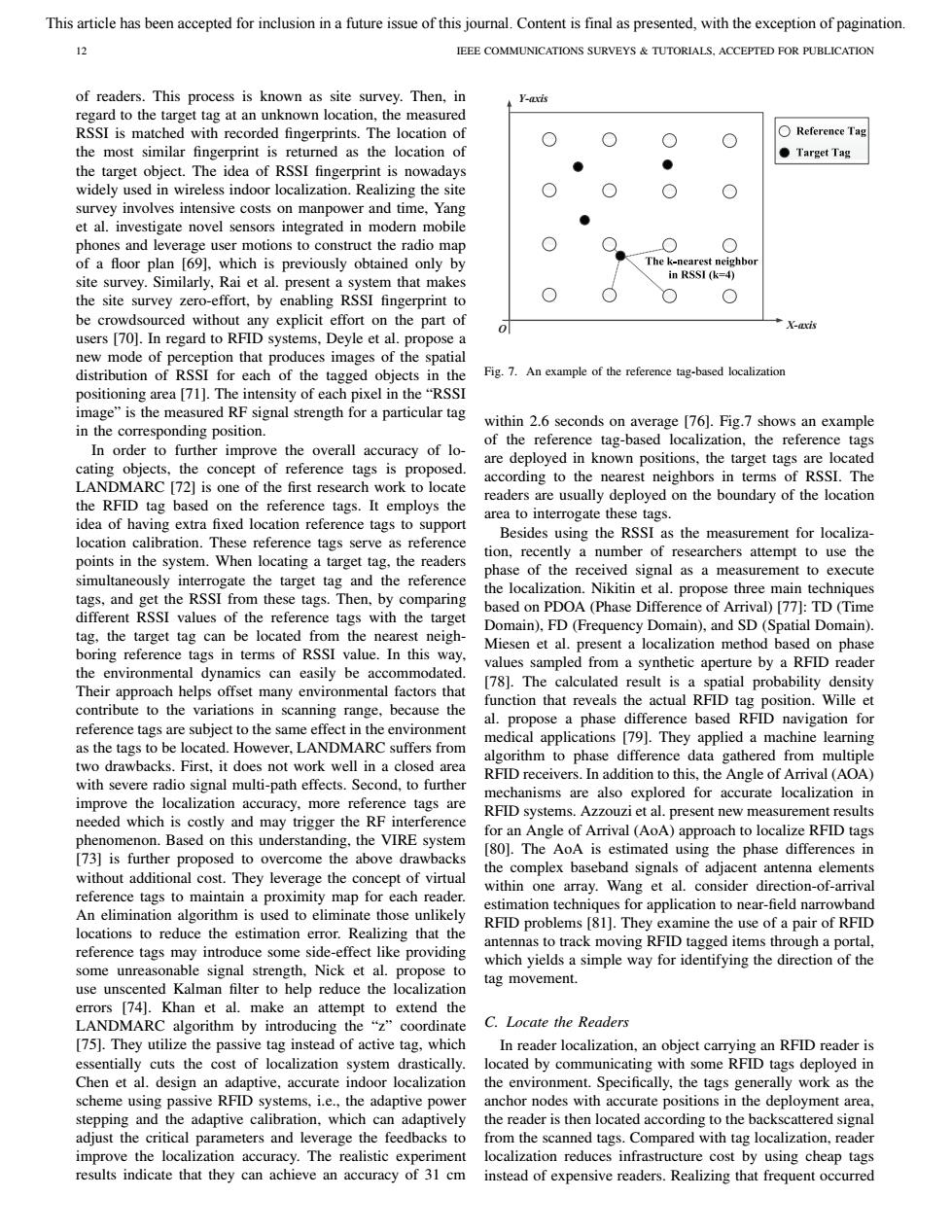
This article has been accepted for inclusion in a future issue of this journal.Content is final as presented,with the exception of pagination. 12 IEEE COMMUNICATIONS SURVEYS TUTORIALS.ACCEPTED FOR PUBLICATION of readers.This process is known as site survey.Then,in Y-axis regard to the target tag at an unknown location,the measured RSSI is matched with recorded fingerprints.The location of O Reference Tag the most similar fingerprint is returned as the location of ●Target Tag the target object.The idea of RSSI fingerprint is nowadays widely used in wireless indoor localization.Realizing the site survey involves intensive costs on manpower and time,Yang et al.investigate novel sensors integrated in modern mobile phones and leverage user motions to construct the radio map ○ O of a floor plan [69].which is previously obtained only by The k-nearest neighbor site survey.Similarly,Rai et al.present a system that makes in RSSI (k=4) the site survey zero-effort,by enabling RSSI fingerprint to ○ O be crowdsourced without any explicit effort on the part of 0 X-axis users [70].In regard to RFID systems,Deyle et al.propose a new mode of perception that produces images of the spatial distribution of RSSI for each of the tagged objects in the Fig.7.An example of the reference tag-based localization positioning area [71].The intensity of each pixel in the"RSSI image"is the measured RF signal strength for a particular tag within 2.6 seconds on average [76].Fig.7 shows an example in the corresponding position. of the reference tag-based localization,the reference tags In order to further improve the overall accuracy of lo- cating objects,the concept of reference tags is proposed. are deployed in known positions,the target tags are located according to the nearest neighbors in terms of RSSI.The LANDMARC [72]is one of the first research work to locate the RFID tag based on the reference tags.It employs the readers are usually deployed on the boundary of the location area to interrogate these tags. idea of having extra fixed location reference tags to support Besides using the RSSI as the measurement for localiza- location calibration.These reference tags serve as reference points in the system.When locating a target tag,the readers tion,recently a number of researchers attempt to use the phase of the received signal as a measurement to execute simultaneously interrogate the target tag and the reference tags,and get the RSSI from these tags.Then,by comparing the localization.Nikitin et al.propose three main techniques different RSSI values of the reference tags with the target based on PDOA(Phase Difference of Arrival)[77]:TD(Time tag,the target tag can be located from the nearest neigh- Domain),FD(Frequency Domain),and SD(Spatial Domain). boring reference tags in terms of RSSI value.In this way. Miesen et al.present a localization method based on phase values sampled from a synthetic aperture by a RFID reader the environmental dynamics can easily be accommodated. Their approach helps offset many environmental factors that [78].The calculated result is a spatial probability density contribute to the variations in scanning range,because the function that reveals the actual RFID tag position.Wille et al.propose a phase difference based RFID navigation for reference tags are subject to the same effect in the environment as the tags to be located.However,LANDMARC suffers from medical applications [79].They applied a machine learning two drawbacks.First,it does not work well in a closed area algorithm to phase difference data gathered from multiple RFID receivers.In addition to this,the Angle of Arrival (AOA) with severe radio signal multi-path effects.Second,to further mechanisms are also explored for accurate localization in improve the localization accuracy,more reference tags are RFID systems.Azzouzi et al.present new measurement results needed which is costly and may trigger the RF interference phenomenon.Based on this understanding,the VIRE system for an Angle of Arrival(AoA)approach to localize RFID tags [73]is further proposed to overcome the above drawbacks [80].The AoA is estimated using the phase differences in the complex baseband signals of adjacent antenna elements without additional cost.They leverage the concept of virtual within one array.Wang et al.consider direction-of-arrival reference tags to maintain a proximity map for each reader. estimation techniques for application to near-field narrowband An elimination algorithm is used to eliminate those unlikely RFID problems [81].They examine the use of a pair of RFID locations to reduce the estimation error.Realizing that the reference tags may introduce some side-effect like providing antennas to track moving RFID tagged items through a portal, which yields a simple way for identifying the direction of the some unreasonable signal strength,Nick et al.propose to tag movement. use unscented Kalman filter to help reduce the localization errors [74].Khan et al.make an attempt to extend the LANDMARC algorithm by introducing the "z"coordinate C.Locate the Readers [75].They utilize the passive tag instead of active tag,which In reader localization,an object carrying an RFID reader is essentially cuts the cost of localization system drastically. located by communicating with some RFID tags deployed in Chen et al.design an adaptive,accurate indoor localization the environment.Specifically,the tags generally work as the scheme using passive RFID systems,i.e.,the adaptive power anchor nodes with accurate positions in the deployment area, stepping and the adaptive calibration,which can adaptively the reader is then located according to the backscattered signal adjust the critical parameters and leverage the feedbacks to from the scanned tags.Compared with tag localization,reader improve the localization accuracy.The realistic experiment localization reduces infrastructure cost by using cheap tags results indicate that they can achieve an accuracy of 31 cm instead of expensive readers.Realizing that frequent occurred12 IEEE COMMUNICATIONS SURVEYS & TUTORIALS, ACCEPTED FOR PUBLICATION of readers. This process is known as site survey. Then, in regard to the target tag at an unknown location, the measured RSSI is matched with recorded fingerprints. The location of the most similar fingerprint is returned as the location of the target object. The idea of RSSI fingerprint is nowadays widely used in wireless indoor localization. Realizing the site survey involves intensive costs on manpower and time, Yang et al. investigate novel sensors integrated in modern mobile phones and leverage user motions to construct the radio map of a floor plan [69], which is previously obtained only by site survey. Similarly, Rai et al. present a system that makes the site survey zero-effort, by enabling RSSI fingerprint to be crowdsourced without any explicit effort on the part of users [70]. In regard to RFID systems, Deyle et al. propose a new mode of perception that produces images of the spatial distribution of RSSI for each of the tagged objects in the positioning area [71]. The intensity of each pixel in the “RSSI image” is the measured RF signal strength for a particular tag in the corresponding position. In order to further improve the overall accuracy of locating objects, the concept of reference tags is proposed. LANDMARC [72] is one of the first research work to locate the RFID tag based on the reference tags. It employs the idea of having extra fixed location reference tags to support location calibration. These reference tags serve as reference points in the system. When locating a target tag, the readers simultaneously interrogate the target tag and the reference tags, and get the RSSI from these tags. Then, by comparing different RSSI values of the reference tags with the target tag, the target tag can be located from the nearest neighboring reference tags in terms of RSSI value. In this way, the environmental dynamics can easily be accommodated. Their approach helps offset many environmental factors that contribute to the variations in scanning range, because the reference tags are subject to the same effect in the environment as the tags to be located. However, LANDMARC suffers from two drawbacks. First, it does not work well in a closed area with severe radio signal multi-path effects. Second, to further improve the localization accuracy, more reference tags are needed which is costly and may trigger the RF interference phenomenon. Based on this understanding, the VIRE system [73] is further proposed to overcome the above drawbacks without additional cost. They leverage the concept of virtual reference tags to maintain a proximity map for each reader. An elimination algorithm is used to eliminate those unlikely locations to reduce the estimation error. Realizing that the reference tags may introduce some side-effect like providing some unreasonable signal strength, Nick et al. propose to use unscented Kalman filter to help reduce the localization errors [74]. Khan et al. make an attempt to extend the LANDMARC algorithm by introducing the “z” coordinate [75]. They utilize the passive tag instead of active tag, which essentially cuts the cost of localization system drastically. Chen et al. design an adaptive, accurate indoor localization scheme using passive RFID systems, i.e., the adaptive power stepping and the adaptive calibration, which can adaptively adjust the critical parameters and leverage the feedbacks to improve the localization accuracy. The realistic experiment results indicate that they can achieve an accuracy of 31 cm O X-axis Y-axis Fig. 7. An example of the reference tag-based localization within 2.6 seconds on average [76]. Fig.7 shows an example of the reference tag-based localization, the reference tags are deployed in known positions, the target tags are located according to the nearest neighbors in terms of RSSI. The readers are usually deployed on the boundary of the location area to interrogate these tags. Besides using the RSSI as the measurement for localization, recently a number of researchers attempt to use the phase of the received signal as a measurement to execute the localization. Nikitin et al. propose three main techniques based on PDOA (Phase Difference of Arrival) [77]: TD (Time Domain), FD (Frequency Domain), and SD (Spatial Domain). Miesen et al. present a localization method based on phase values sampled from a synthetic aperture by a RFID reader [78]. The calculated result is a spatial probability density function that reveals the actual RFID tag position. Wille et al. propose a phase difference based RFID navigation for medical applications [79]. They applied a machine learning algorithm to phase difference data gathered from multiple RFID receivers. In addition to this, the Angle of Arrival (AOA) mechanisms are also explored for accurate localization in RFID systems. Azzouzi et al. present new measurement results for an Angle of Arrival (AoA) approach to localize RFID tags [80]. The AoA is estimated using the phase differences in the complex baseband signals of adjacent antenna elements within one array. Wang et al. consider direction-of-arrival estimation techniques for application to near-field narrowband RFID problems [81]. They examine the use of a pair of RFID antennas to track moving RFID tagged items through a portal, which yields a simple way for identifying the direction of the tag movement. C. Locate the Readers In reader localization, an object carrying an RFID reader is located by communicating with some RFID tags deployed in the environment. Specifically, the tags generally work as the anchor nodes with accurate positions in the deployment area, the reader is then located according to the backscattered signal from the scanned tags. Compared with tag localization, reader localization reduces infrastructure cost by using cheap tags instead of expensive readers. Realizing that frequent occurred This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination