正在加载图片...
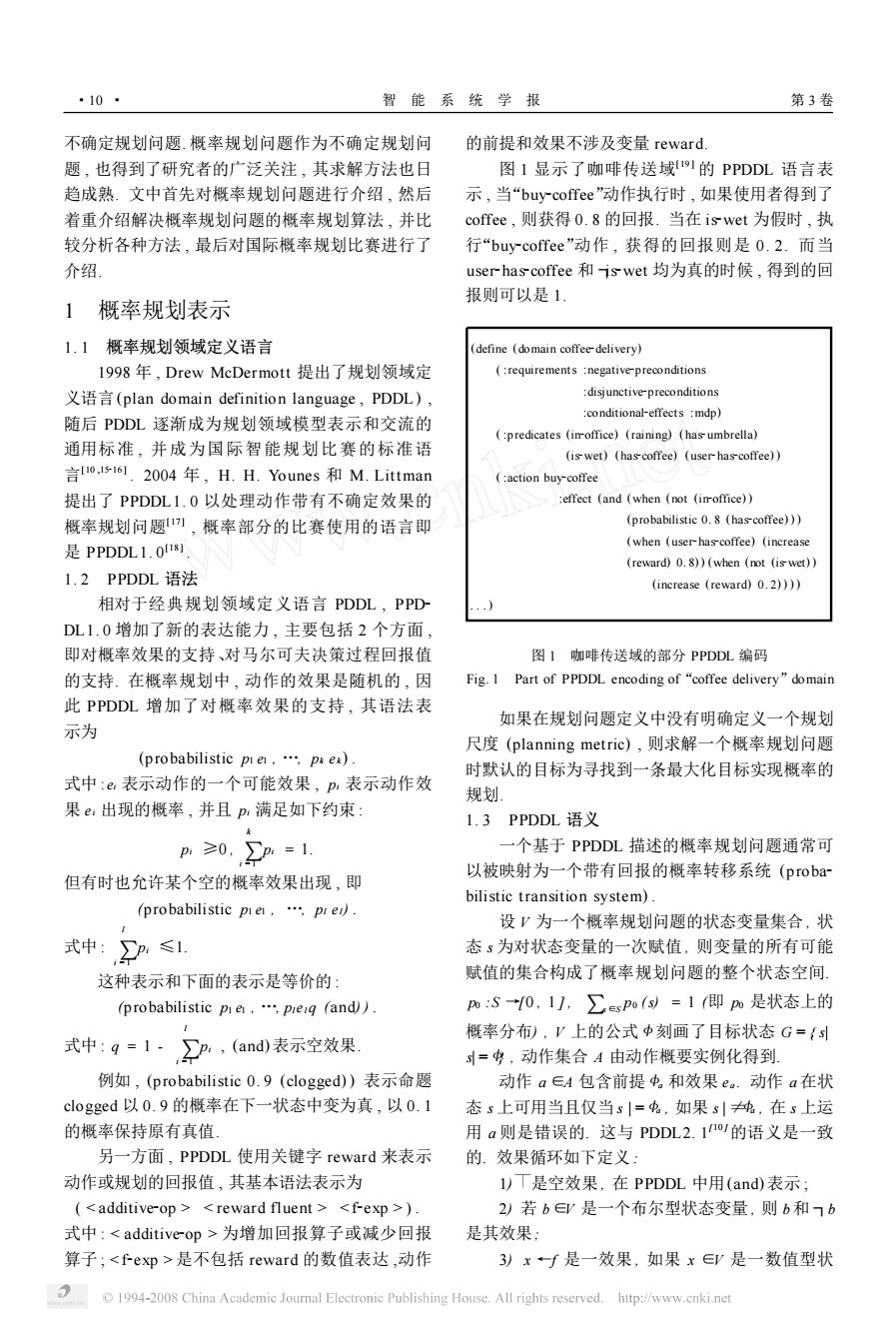
·10· 智能系统学报 第3卷 不确定规划问题.概率规划问题作为不确定规划问 的前提和效果不涉及变量reward. 题,也得到了研究者的广泛关注,其求解方法也日 图1显示了咖啡传送域11的PPDDL语言表 趋成熟.文中首先对概率规划问题进行介绍,然后 示,当“buy-coffee”动作执行时,如果使用者得到了 着重介绍解决概率规划问题的概率规划算法,并比 coffee,则获得0.8的回报.当在iswet为假时,执 较分析各种方法,最后对国际概率规划比赛进行了 行“buy-coffee”动作,获得的回报则是0.2.而当 介绍. user-has-coffee和iswet均为真的时候,得到的回 报则可以是1。 1概率规划表示 1.1概率规划领域定义语言 (define (domain coffee-delivery) 1998年,Drew McDermott提出了规划领域定 (requirements negative-preconditions 义语言(plan domain definition language,PDDL), disjunctive-preconditions :conditional-effects mdp) 随后PDDL逐渐成为规划领域模型表示和交流的 (predicates (imoffice)(raining)(hasumbrella) 通用标准,并成为国际智能规划比赛的标准语 (is wet)(hascoffee)(user-has-coffee)) 言o,516.2004年,H.H.Younes和M.Littman (:action buy-coffee 提出了PPDDL1.0以处理动作带有不确定效果的 effect (and (when (not (imroffice)) 概率规划问题),概率部分的比赛使用的语言即 (probabilistic 0.8 (has-coffee))) 是PPDDL1.018割. (when (user-has-coffee)(increase (reward)0.8))(when (not (is wet)) 1.2 PPDDL语法 (increase (reward)0.2)))) 相对于经典规划领域定义语言PDDL,PPD DL1.0增加了新的表达能力,主要包括2个方面, 即对概率效果的支持、对马尔可夫决策过程回报值 图1咖啡传送域的部分PPDDL编码 的支持.在概率规划中,动作的效果是随机的,因 Fig.1 Part of PPDDL encoding of"coffee delivery"domain 此PPDDL增加了对概率效果的支持,其语法表 如果在规划问题定义中没有明确定义一个规划 示为 尺度(planning metric),则求解一个概率规划问题 (probabilistic pie,.pes) 时默认的目标为寻找到一条最大化目标实现概率的 式中:e表示动作的一个可能效果,p,表示动作效 规划 果e:出现的概率,并且p:满足如下约束 1.3 PPDDL语义 p≥0,p=1. 一个基于PPDDL描述的概率规划问题通常可 以被映射为一个带有回报的概率转移系统(proba- 但有时也允许某个空的概率效果出现,即 bilistic transition system). (probabilistic pie,pre). 设V为一个概率规划问题的状态变量集合,状 式中:P:≤1 态s为对状态变量的一次赋值,则变量的所有可能 这种表示和下面的表示是等价的: 赋值的集合构成了概率规划问题的整个状态空间. (probabilistic pie,.preq (and)). pm:S0,1],∑spo()=1即m是状态上的 概率分布),V上的公式中刻画了目标状态G={ 式中:g=1-,P:,(and表示空效果 =$,动作集合A由动作概要实例化得到. 例如,(probabilistic0.9(clogged)表示命题 动作a∈A包含前提中。和效果e。.动作a在状 clogged以0.9的概率在下一状态中变为真,以0.1 态s上可用当且仅当s|=$,如果s|纯,在s上运 的概率保持原有真值。 用a则是错误的.这与PDDL2.1的语义是一致 另一方面,PPDDL使用关键字reward来表示 的.效果循环如下定义: 动作或规划的回报值,其基本语法表示为 l)T是空效果,在PPDDL中用(and)表示; (<additive-op><reward fluent <f-exp > 2)若b∈是一个布尔型状态变量,则b和7b 式中:<additive-op>为增加回报算子或减少回报 是其效果: 算子;<fep>是不包括reward的数值表达,动作 3)xf是一效果,如果x∈是一数值型状 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net不确定规划问题. 概率规划问题作为不确定规划问 题 , 也得到了研究者的广泛关注 , 其求解方法也日 趋成熟. 文中首先对概率规划问题进行介绍 , 然后 着重介绍解决概率规划问题的概率规划算法 , 并比 较分析各种方法 , 最后对国际概率规划比赛进行了 介绍. 1 概率规划表示 1. 1 概率规划领域定义语言 1998 年 , Drew McDermott 提出了规划领域定 义语言(plan domain definition language , PDDL) , 随后 PDDL 逐渐成为规划领域模型表示和交流的 通用标准 , 并成为国际智能规划比赛的标准语 言[10 ,15216 ] . 2004 年 , H. H. Younes 和 M. Littman 提出了 PPDDL1. 0 以处理动作带有不确定效果的 概率规划问题[17 ] , 概率部分的比赛使用的语言即 是 PPDDL1. 0 [18 ] . 1. 2 PPDDL 语法 相对于经典规划领域定义语言 PDDL , PPD2 DL1. 0 增加了新的表达能力 , 主要包括 2 个方面 , 即对概率效果的支持、对马尔可夫决策过程回报值 的支持. 在概率规划中 , 动作的效果是随机的 , 因 此 PPDDL 增加了对概率效果的支持 , 其语法表 示为 (p robabilistic p1 e1 , …, pk ek ) . 式中 : ei 表示动作的一个可能效果 , pi 表示动作效 果 ei 出现的概率 , 并且 pi 满足如下约束 : pi ≥0 , ∑ k i = 1 pi = 1. 但有时也允许某个空的概率效果出现 , 即 (probabilistic p1 e1 , …, pl el) . 式中 : ∑ l i = 1 pi ≤1. 这种表示和下面的表示是等价的 : (probabilistic p1 e1 , …, plel q (and) ) . 式中 : q = 1 - ∑ l i = 1 pi , (and) 表示空效果. 例如 , (probabilistic 0. 9 (clogged) ) 表示命题 clogged 以 0. 9 的概率在下一状态中变为真 , 以 0. 1 的概率保持原有真值. 另一方面 , PPDDL 使用关键字 reward 来表示 动作或规划的回报值 , 其基本语法表示为 ( < additive2op > < reward fluent > < f2exp > ) . 式中 : < additive2op > 为增加回报算子或减少回报 算子 ; < f2exp > 是不包括 reward 的数值表达 ,动作 的前提和效果不涉及变量 reward. 图 1 显示了咖啡传送域[19 ] 的 PPDDL 语言表 示 , 当“buy2coffee”动作执行时 , 如果使用者得到了 coffee , 则获得 0. 8 的回报. 当在 is2wet 为假时 , 执 行“buy2coffee”动作 , 获得的回报则是 0. 2. 而当 user2has2coffee 和 ┐is2wet 均为真的时候 , 得到的回 报则可以是 1. (define (domain coffee2delivery) ( :requirements :negative2preconditions :disjunctive2preconditions :conditional2effects :mdp) ( :predicates (in2office) (raining) (has2umbrella) (is2wet) (has2coffee) (user2has2coffee) ) ( :action buy2coffee :effect (and (when (not (in2office) ) (probabilistic 0. 8 (has2coffee) ) ) (when (user2has2coffee) (increase (reward) 0. 8) ) (when (not (is2wet) ) (increase (reward) 0. 2) ) ) ) . . . ) 图 1 咖啡传送域的部分 PPDDL 编码 Fig. 1 Part of PPDDL encoding of“coffee delivery”domain 如果在规划问题定义中没有明确定义一个规划 尺度 (planning metric) , 则求解一个概率规划问题 时默认的目标为寻找到一条最大化目标实现概率的 规划. 1. 3 PPDDL 语义 一个基于 PPDDL 描述的概率规划问题通常可 以被映射为一个带有回报的概率转移系统 (proba2 bilistic transition system) . 设 V 为一个概率规划问题的状态变量集合 , 状 态 s 为对状态变量的一次赋值 , 则变量的所有可能 赋值的集合构成了概率规划问题的整个状态空间. p0 :S →[0 , 1 ] , ∑s ∈S p0 (s) = 1 (即 p0 是状态上的 概率分布) , V 上的公式 < 刻画了目标状态 G = { s| s| = <} , 动作集合 A 由动作概要实例化得到. 动作 a ∈A 包含前提 <a 和效果 e a . 动作 a 在状 态 s 上可用当且仅当 s | = <a , 如果 s | ≠<a , 在 s 上运 用 a 则是错误的. 这与 PDDL2. 1 [10 ]的语义是一致 的. 效果循环如下定义 : 1) 是空效果 , 在 PPDDL 中用(and) 表示 ; 2) 若 b∈V 是一个布尔型状态变量 , 则 b和 ┐b 是其效果; 3) x ←f 是一效果 , 如果 x ∈V 是一数值型状 · 01 · 智 能 系 统 学 报 第 3 卷