正在加载图片...
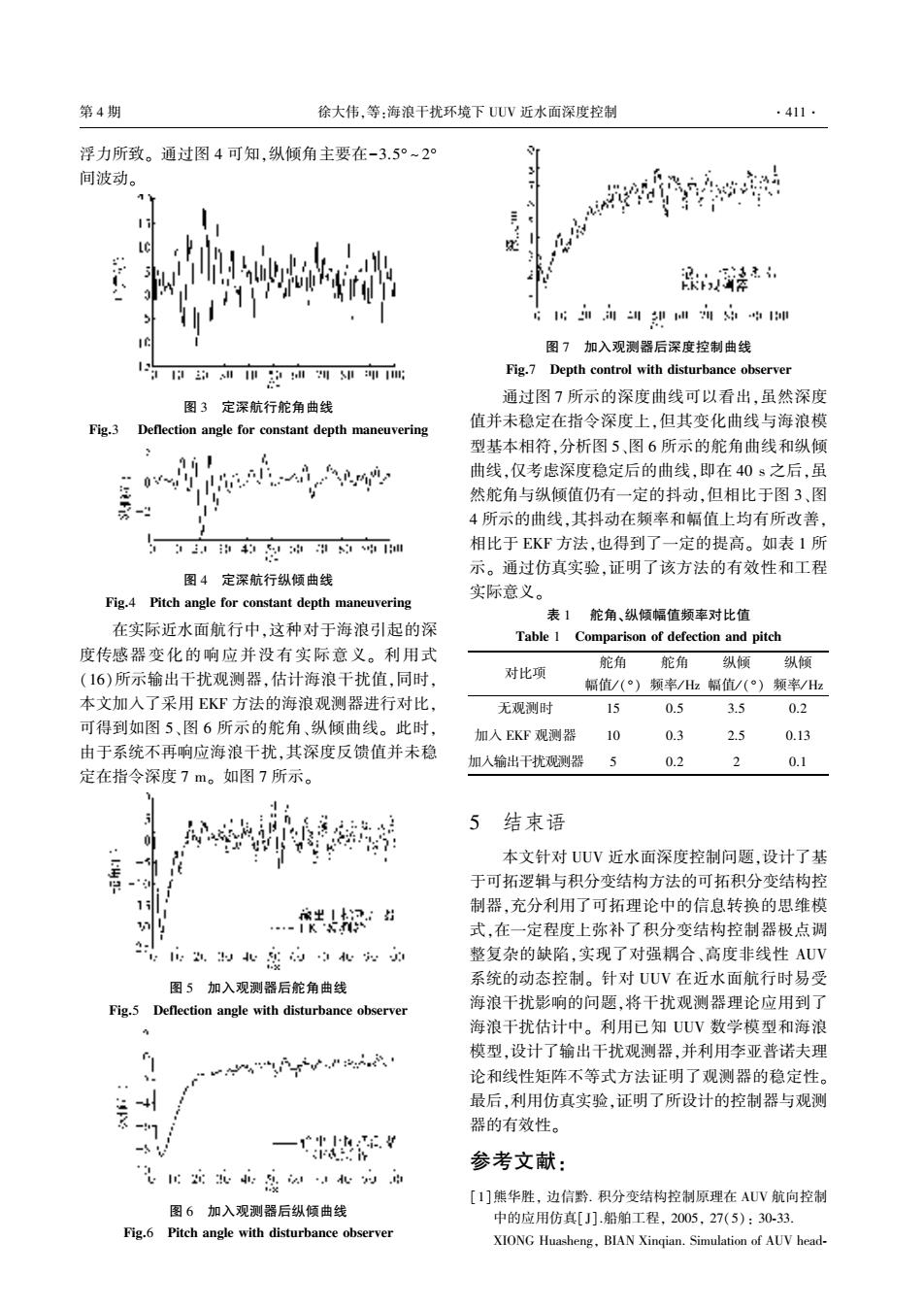
第4期 徐大伟,等:海浪干扰环境下UV近水面深度控制 411· 浮力所致。通过图4可知,纵倾角主要在-3.5°~2 间波动。 1 强,泽 通训排油好中 图7加入观测器后深度控制曲线 Fig.7 Depth control with disturbance observer 通过图7所示的深度曲线可以看出,虽然深度 图3定深航行舵角曲线 Fig.3 Deflection angle for constant depth maneuvering 值并未稳定在指令深度上,但其变化曲线与海浪模 型基本相符,分析图5、图6所示的舵角曲线和纵倾 曲线,仅考虑深度稳定后的曲线,即在40s之后,虽 然舵角与纵倾值仍有一定的抖动,但相比于图3、图 4所示的曲线,其抖动在频率和幅值上均有所改善, 相比于EKF方法,也得到了一定的提高。如表1所 示。通过仿真实验,证明了该方法的有效性和工程 图4定深航行纵倾曲线 实际意义。 Fig.4 Pitch angle for constant depth maneuvering 表1舵角、纵倾幅值频率对比值 在实际近水面航行中,这种对于海浪引起的深 Table 1 Comparison of defection and pitch 度传感器变化的响应并没有实际意义。利用式 舵角 舵角 纵倾 纵倾 (16)所示输出干扰观测器,估计海浪干扰值,同时, 对比项 幅值/(°)频率/Hz幅值/(°)频率/Hz 本文加入了采用EKF方法的海浪观测器进行对比, 无观测时 5 0.5 3.5 0.2 可得到如图5、图6所示的舵角、纵倾曲线。此时, 加入EKF观测器 10 0.3 2.5 0.13 由于系统不再响应海浪干扰,其深度反馈值并未稳 加入输出干扰观测器 5 0.2 2 0.1 定在指令深度7m。如图7所示。 5结束语 01 13 -H 本文针对UUV近水面深度控制问题,设计了基 于可拓逻辑与积分变结构方法的可拓积分变结构控 1 常出记:分 制器,充分利用了可拓理论中的信息转换的思维模 -1K““ 式,在一定程度上弥补了积分变结构控制器极点调 : 为北藏动 整复杂的缺陷,实现了对强耦合、高度非线性AUV 图5加入观测器后舵角曲线 系统的动态控制。针对UUV在近水面航行时易受 Fig.5 Deflection angle with disturbance observer 海浪干扰影响的问题,将干扰观测器理论应用到了 海浪干扰估计中。利用已知UUV数学模型和海浪 模型,设计了输出干扰观测器,并利用李亚普诺夫理 论和线性矩阵不等式方法证明了观测器的稳定性。 最后,利用仿真实验,证明了所设计的控制器与观测 器的有效性。 —1非装 i 民状欢北盘训水” 参考文献: [1]熊华胜,边信黔.积分变结构控制原理在AUV航向控制 图6加入观测器后纵倾曲线 中的应用仿真[J].船舶工程,2005,27(5):30-33. Fig.6 Pitch angle with disturbance observer XIONG Huasheng,BIAN Xinqian.Simulation of AUV head-浮力所致遥 通过图 源 可知袁纵倾角主要在原猿援缘毅 耀 圆毅 间波动遥 图 猿摇 定深航行舵角曲线 云蚤早援猿摇 阅藻枣造藻糟贼蚤燥灶 葬灶早造藻 枣燥则 糟燥灶泽贼葬灶贼 凿藻责贼澡 皂葬灶藻怎增藻则蚤灶早 图 源摇 定深航行纵倾曲线 云蚤早援源摇 孕蚤贼糟澡 葬灶早造藻 枣燥则 糟燥灶泽贼葬灶贼 凿藻责贼澡 皂葬灶藻怎增藻则蚤灶早 在实际近水面航行中袁这种对于海浪引起的深 度传感器变化的响应并没有实际意义遥 利用式 渊员远冤所示输出干扰观测器袁估计海浪干扰值袁同时袁 本文加入了采用 耘运云 方法的海浪观测器进行对比袁 可得到如图 缘尧图 远 所示的舵角尧纵倾曲线遥 此时袁 由于系统不再响应海浪干扰袁其深度反馈值并未稳 定在指令深度 苑 皂遥 如图 苑 所示遥 图 缘摇 加入观测器后舵角曲线 云蚤早援缘摇 阅藻枣造藻糟贼蚤燥灶 葬灶早造藻 憎蚤贼澡 凿蚤泽贼怎则遭葬灶糟藻 燥遭泽藻则增藻则 图 远摇 加入观测器后纵倾曲线 云蚤早援远摇 孕蚤贼糟澡 葬灶早造藻 憎蚤贼澡 凿蚤泽贼怎则遭葬灶糟藻 燥遭泽藻则增藻则 图 苑摇 加入观测器后深度控制曲线 云蚤早援苑摇 阅藻责贼澡 糟燥灶贼则燥造 憎蚤贼澡 凿蚤泽贼怎则遭葬灶糟藻 燥遭泽藻则增藻则 摇 摇 通过图 苑 所示的深度曲线可以看出袁虽然深度 值并未稳定在指令深度上袁但其变化曲线与海浪模 型基本相符袁分析图 缘尧图 远 所示的舵角曲线和纵倾 曲线袁仅考虑深度稳定后的曲线袁即在 源园 泽 之后袁虽 然舵角与纵倾值仍有一定的抖动袁但相比于图 猿尧图 源 所示的曲线袁其抖动在频率和幅值上均有所改善袁 相比于 耘运云 方法袁也得到了一定的提高遥 如表 员 所 示遥 通过仿真实验袁证明了该方法的有效性和工程 实际意义遥 表 员摇 舵角尧纵倾幅值频率对比值 栽葬遭造藻 员摇 悦燥皂责葬则蚤泽燥灶 燥枣 凿藻枣藻糟贼蚤燥灶 葬灶凿 责蚤贼糟澡 对比项 舵角 幅值辕 渊毅冤 舵角 频率辕 匀扎 纵倾 幅值辕 渊毅冤 纵倾 频率辕 匀扎 无观测时 员缘 园援缘 猿援缘 园援圆 加入 耘运云 观测器 员园 园援猿 圆援缘 园援员猿 加入输出干扰观测器 缘 园援圆 圆 园援员 缘摇 结束语 本文针对 哉哉灾 近水面深度控制问题袁设计了基 于可拓逻辑与积分变结构方法的可拓积分变结构控 制器袁充分利用了可拓理论中的信息转换的思维模 式袁在一定程度上弥补了积分变结构控制器极点调 整复杂的缺陷袁实现了对强耦合尧高度非线性 粤哉灾 系统的动态控制遥 针对 哉哉灾 在近水面航行时易受 海浪干扰影响的问题袁将干扰观测器理论应用到了 海浪干扰估计中遥 利用已知 哉哉灾 数学模型和海浪 模型袁设计了输出干扰观测器袁并利用李亚普诺夫理 论和线性矩阵不等式方法证明了观测器的稳定性遥 最后袁利用仿真实验袁证明了所设计的控制器与观测 器的有效性遥 参考文献院 咱员暂熊华胜袁 边信黔援 积分变结构控制原理在 粤哉灾 航向控制 中的应用仿真咱允暂援船舶工程袁 圆园园缘袁 圆苑渊缘冤 院 猿园鄄猿猿援 载陨韵晕郧 匀怎葬泽澡藻灶早袁 月陨粤晕 载蚤灶择蚤葬灶援 杂蚤皂怎造葬贼蚤燥灶 燥枣 粤哉灾 澡藻葬凿鄄 第 源 期摇摇摇摇摇摇摇摇摇摇摇摇摇摇 徐大伟袁等院海浪干扰环境下 哉哉灾 近水面深度控制 窑源员员窑