正在加载图片...
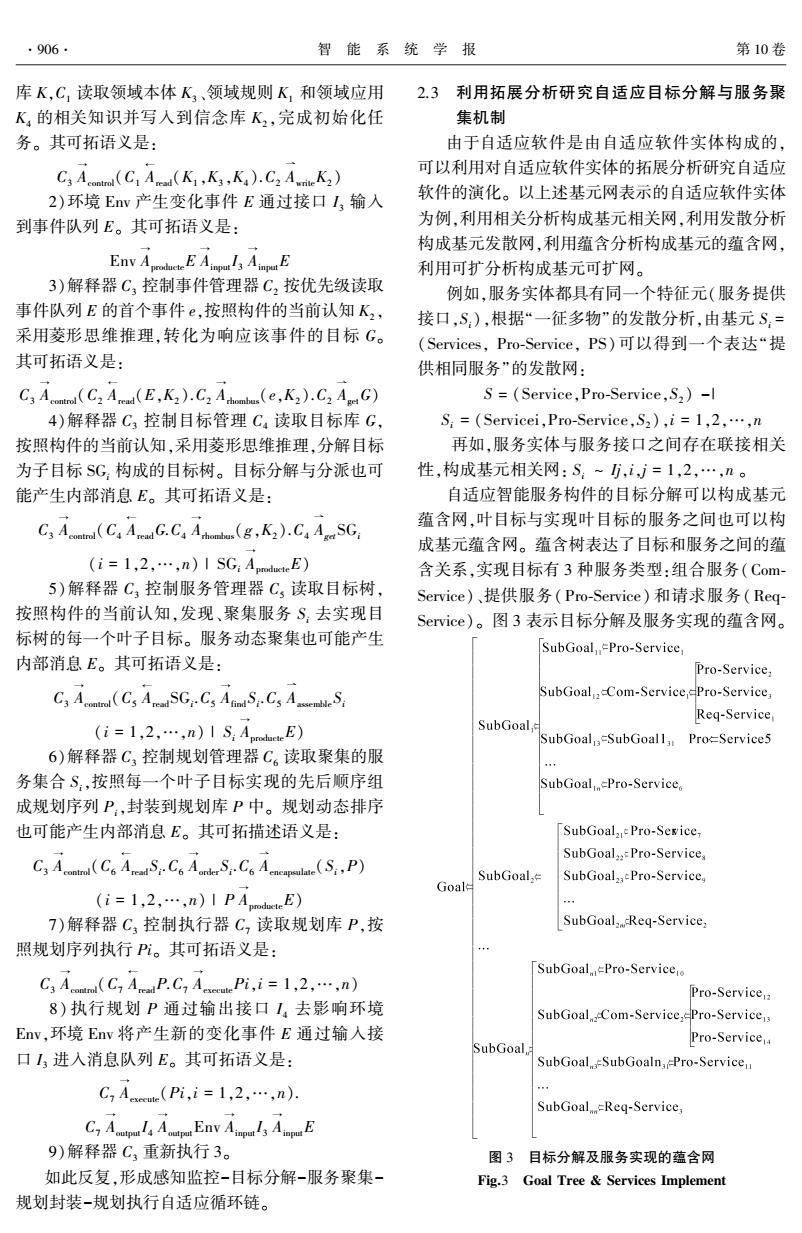
·906· 智能系统学报 第10卷 库K,C,读取领域本体K,、领域规则K和领域应用 2.3利用拓展分析研究自适应目标分解与服务聚 K,的相关知识并写入到信念库K,完成初始化任 集机制 务。其可拓语义是: 由于自适应软件是由自适应软件实体构成的, C3Aom(C1Aad(K1,K3,K).C2AmK2) 可以利用对自适应软件实体的拓展分析研究自适应 2)环境Ev产生变化事件E通过接口I3输入 软件的演化。以上述基元网表示的自适应软件实体 到事件队列E。其可拓语义是: 为例,利用相关分析构成基元相关网,利用发散分析 构成基元发散网,利用蕴含分析构成基元的蕴含网, Env ApdceEAAE 利用可扩分析构成基元可扩网。 3)解释器C3控制事件管理器C,按优先级读取 例如,服务实体都具有同一个特征元(服务提供 事件队列E的首个事件e,按照构件的当前认知K2, 接口,S),根据“一征多物”的发散分析,由基元S= 采用菱形思维推理,转化为响应该事件的目标G。 (Services,Pro-Service,PS)可以得到一个表达“提 其可拓语义是: 供相同服务”的发散网: C3 A contro(C2Aead(E,K2).C2 A chombus(e,K2).C2AeG) S=(Service,Pro-Service,S2)-I 4)解释器C3控制目标管理C4读取目标库G, S;=(Servicei,Pro-Service,S2),i=1,2,.,n 按照构件的当前认知,采用菱形思维推理,分解目标 再如,服务实体与服务接口之间存在联接相关 为子目标$G构成的目标树。目标分解与分派也可 性,构成基元相关网:S~j,ij=1,2,…,n。 能产生内部消息E。其可拓语义是: 自适应智能服务构件的目标分解可以构成基元 C3(Ca AG.C4 Aous(g,Kz).CaARSG 蕴含网,叶目标与实现叶目标的服务之间也可以构 成基元蕴含网。蕴含树表达了目标和服务之间的蕴 (i=1,2,.,n)I SGi ApmducteE) 含关系,实现目标有3种服务类型:组合服务(Com- 5)解释器C3控制服务管理器C读取目标树, Service)、提供服务(Pro-Service)和请求服务(Req 按照构件的当前认知,发现、聚集服务S,去实现目 Service)。图3表示目标分解及服务实现的蕴含网。 标树的每一个叶子目标。服务动态聚集也可能产生 SubGoal =Pro-Service, 内部消息E。其可拓语义是: Pro-Service, C3 A(Cs ASGCs AimdCs AS SubGoal,,-Com-Service Pro-Service, Req-Service (i=1,2...n)I S,ApmduceE) SubGoal, SubGoal-SubGoall Pro-Service5 6)解释器C3控制规划管理器C6读取聚集的服 务集合S,按照每一个叶子目标实现的先后顺序组 SubGoal =Pro-Service 成规划序列P:,封装到规划库P中。规划动态排序 也可能产生内部消息E。其可拓描述语义是: SubGoalze Pro-Sevice, SubGoal,-Pro-Services C3 A(Co ACo AeSCo A(SP) SubGoal. SubGoal,ePro-Service Goal (i=1,2,…,n)P AproducteE) 7)解释器C;控制执行器C,读取规划库P,按 SubGoal,Req-Service, 照规划序列执行Pi。其可拓语义是: SubGoal Pro-Service C3 A(C AP.CA Pi,i=1,2..n) Pro-Service 8)执行规划P通过输出接口I,去影响环境 SubGoal Com-Service,+Pro-Service Env,环境Env将产生新的变化事件E通过输入接 Pro-Service SubGoal. 口13进入消息队列E。其可拓语义是: SubGoal SubGoaln-Pro-Service C Aem(Pi,i=1,2..n). SubGoal =Req-Service, CAAEnv AAE 9)解释器C3重新执行3。 图3目标分解及服务实现的蕴含网 如此反复,形成感知监控-目标分解-服务聚集- Fig.3 Goal Tree Services Implement 规划封装-规划执行自适应循环链。库 K,C1 读取领域本体 K3 、领域规则 K1 和领域应用 K4 的相关知识并写入到信念库 K2 ,完成初始化任 务。 其可拓语义是: C3 A → control(C1 A ← read(K1 ,K3 ,K4 ).C2 A ⇀ writeK2 ) 2)环境 Env 产生变化事件 E 通过接口 I3 输入 到事件队列 E。 其可拓语义是: Env A → producteE A → input I3 A → inputE 3)解释器 C3 控制事件管理器 C2 按优先级读取 事件队列 E 的首个事件 e,按照构件的当前认知 K2 , 采用菱形思维推理,转化为响应该事件的目标 G。 其可拓语义是: C3 A → control(C2 A ← read(E,K2 ).C2 A → rhombus(e,K2 ).C2 A ⇀ getG) 4)解释器 C3 控制目标管理 C4 读取目标库 G, 按照构件的当前认知,采用菱形思维推理,分解目标 为子目标 SGi 构成的目标树。 目标分解与分派也可 能产生内部消息 E。 其可拓语义是: C3 A → control(C4 A ← readG.C4 A → rhombus(g,K2 ).C4 A ⇀ getSGi (i = 1,2,…,n) | SGi A → producteE) 5)解释器 C3 控制服务管理器 C5 读取目标树, 按照构件的当前认知,发现、聚集服务 Si 去实现目 标树的每一个叶子目标。 服务动态聚集也可能产生 内部消息 E。 其可拓语义是: C3 A → control(C5 A ← read SGi .C5 A → find Si .C5 A ⇀ assembleSi (i = 1,2,…,n) | Si A → producteE) 6)解释器 C3 控制规划管理器 C6 读取聚集的服 务集合 Si,按照每一个叶子目标实现的先后顺序组 成规划序列 Pi,封装到规划库 P 中。 规划动态排序 也可能产生内部消息 E。 其可拓描述语义是: C3 A → control(C6 A ← read Si .C6 A → orderSi .C6 A ⇀ encapsulate(Si,P) (i = 1,2,…,n) | P A → producteE) 7)解释器 C3 控制执行器 C7 读取规划库 P,按 照规划序列执行 Pi。 其可拓语义是: C3 A → control(C7 A ← readP.C7 A → executePi,i = 1,2,…,n) 8) 执行规划 P 通过输出接口 I4 去影响环境 Env,环境 Env 将产生新的变化事件 E 通过输入接 口 I3 进入消息队列 E。 其可拓语义是: C7 A → execute(Pi,i = 1,2,…,n). C7 A → output I4 A → outputEnv A → input I3 A → inputE 9)解释器 C3 重新执行 3。 如此反复,形成感知监控-目标分解-服务聚集- 规划封装-规划执行自适应循环链。 2.3 利用拓展分析研究自适应目标分解与服务聚 集机制 由于自适应软件是由自适应软件实体构成的, 可以利用对自适应软件实体的拓展分析研究自适应 软件的演化。 以上述基元网表示的自适应软件实体 为例,利用相关分析构成基元相关网,利用发散分析 构成基元发散网,利用蕴含分析构成基元的蕴含网, 利用可扩分析构成基元可扩网。 例如,服务实体都具有同一个特征元(服务提供 接口,Si),根据“一征多物”的发散分析,由基元 Si = (Services, Pro⁃Service, PS) 可以得到一个表达“提 供相同服务”的发散网: S = (Service,Pro⁃Service,S2 ) -| Si = (Servicei,Pro⁃Service,S2 ),i = 1,2,…,n 再如,服务实体与服务接口之间存在联接相关 性,构成基元相关网: Si ~ Ij,i,j = 1,2,…,n 。 自适应智能服务构件的目标分解可以构成基元 蕴含网,叶目标与实现叶目标的服务之间也可以构 成基元蕴含网。 蕴含树表达了目标和服务之间的蕴 含关系,实现目标有 3 种服务类型:组合服务(Com⁃ Service)、提供服务( Pro⁃Service) 和请求服务(Req⁃ Service)。 图 3 表示目标分解及服务实现的蕴含网。 图 3 目标分解及服务实现的蕴含网 Fig.3 Goal Tree & Services Implement ·906· 智 能 系 统 学 报 第 10 卷