正在加载图片...
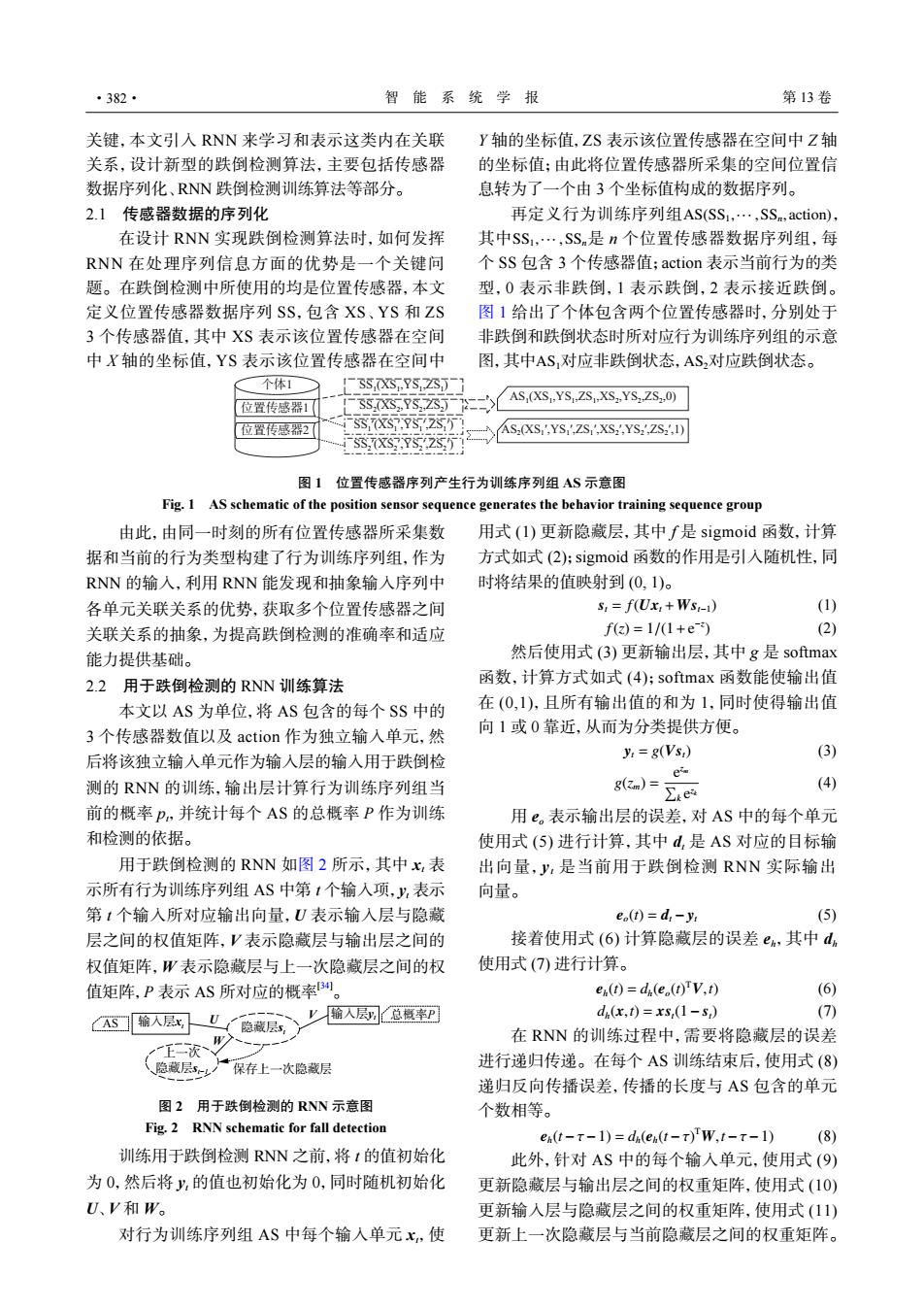
·382· 智能系统学报 第13卷 关键,本文引入RNN来学习和表示这类内在关联 Y轴的坐标值,ZS表示该位置传感器在空间中Z轴 关系,设计新型的跌倒检测算法,主要包括传感器 的坐标值;由此将位置传感器所采集的空间位置信 数据序列化、RNN跌倒检测训练算法等部分。 息转为了一个由3个坐标值构成的数据序列。 2.1传感器数据的序列化 再定义行为训练序列组AS(SS1,…,SSn,action), 在设计RNN实现跌倒检测算法时,如何发挥 其中SS,…,SSn是n个位置传感器数据序列组,每 RNN在处理序列信息方面的优势是一个关键问 个SS包含3个传感器值;action表示当前行为的类 题。在跌倒检测中所使用的均是位置传感器,本文 型,0表示非跌倒,1表示跌倒,2表示接近跌倒。 定义位置传感器数据序列SS,包含XS、YS和ZS 图1给出了个体包含两个位置传感器时,分别处于 3个传感器值,其中X$表示该位置传感器在空间 非跌倒和跌倒状态时所对应行为训练序列组的示意 中X轴的坐标值,YS表示该位置传感器在空间中 图,其中AS,对应非跌倒状态,AS2对应跌倒状态。 个体1 SS,(XS YSZS 位置传感器1 广8s0XS2j二 AS (XSYSZSXSYS,ZS.,0) 位置传感器2 s,衣$s,2达 AS (XSYSIZSIXSYSZS1) SS.CXS77S 25)1 图1位置传感器序列产生行为训练序列组AS示意图 Fig.1 AS schematic of the position sensor sequence generates the behavior training sequence group 由此,由同一时刻的所有位置传感器所采集数 用式(I)更新隐藏层,其中f是sigmoid函数,计算 据和当前的行为类型构建了行为训练序列组,作为 方式如式(2):sigmoid函数的作用是引入随机性,同 RNN的输人,利用RNN能发现和抽象输入序列中 时将结果的值映射到(0,1)。 各单元关联关系的优势,获取多个位置传感器之间 s:=f(Ux:+Ws-1) (1) 关联关系的抽象,为提高跌倒检测的准确率和适应 fz)=1/1+e) (2) 能力提供基础。 然后使用式(3)更新输出层,其中g是softmax 2.2用于跌倒检测的RNN训练算法 函数,计算方式如式(4);softmax函数能使输出值 本文以AS为单位,将AS包含的每个SS中的 在(0,1),且所有输出值的和为1,同时使得输出值 3个传感器数值以及action作为独立输入单元,然 向1或0靠近,从而为分类提供方便。 后将该独立输入单元作为输入层的输入用于跌倒检 yr=g(Vs,) (3) e 测的RNN的训练,输出层计算行为训练序列组当 g)=4e (4) 前的概率P,并统计每个AS的总概率P作为训练 用e。表示输出层的误差,对AS中的每个单元 和检测的依据。 使用式(⑤)进行计算,其中d,是AS对应的目标输 用于跌倒检测的RNN如图2所示,其中x,表 出向量,y,是当前用于跌倒检测RNN实际输出 示所有行为训练序列组AS中第1个输入项,y,表示 向量。 第1个输入所对应输出向量,U表示输入层与隐藏 e(①=d,-y (5) 层之间的权值矩阵,V表示隐藏层与输出层之间的 接着使用式(6)计算隐藏层的误差eh,其中d, 权值矩阵,W表示隐藏层与上一次隐藏层之间的权 使用式(⑦)进行计算。 值矩阵,P表示AS所对应的概率B en(t)=di(e(1)V,t) (6) AS☐输入层x d(x,t)=xs,(1-s) U V输人层总概率P (7) 隐藏层 在RNN的训练过程中,需要将隐藏层的误差 正一次 、隐藏层s- 保存上一次隐藏层 进行递归传递。在每个AS训练结束后,使用式(8) 递归反向传播误差,传播的长度与A$包含的单元 图2用于跌倒检测的RNN示意图 个数相等。 Fig.2 RNN schematic for fall detection en(t-T-1)=di(en(t-T)W,t-T-1) (8) 训练用于跌倒检测RNN之前,将1的值初始化 此外,针对AS中的每个输入单元,使用式(9) 为0,然后将y,的值也初始化为0,同时随机初始化 更新隐藏层与输出层之间的权重矩阵,使用式(10) U、V和W。 更新输入层与隐藏层之间的权重矩阵,使用式(11) 对行为训练序列组AS中每个输入单元x,使 更新上一次隐藏层与当前隐藏层之间的权重矩阵。关键,本文引入 RNN 来学习和表示这类内在关联 关系,设计新型的跌倒检测算法,主要包括传感器 数据序列化、RNN 跌倒检测训练算法等部分。 2.1 传感器数据的序列化 在设计 RNN 实现跌倒检测算法时,如何发挥 RNN 在处理序列信息方面的优势是一个关键问 题。在跌倒检测中所使用的均是位置传感器,本文 定义位置传感器数据序列 SS,包含 XS、YS 和 ZS 3 个传感器值,其中 XS 表示该位置传感器在空间 中 X 轴的坐标值,YS 表示该位置传感器在空间中 Y 轴的坐标值,ZS 表示该位置传感器在空间中 Z 轴 的坐标值;由此将位置传感器所采集的空间位置信 息转为了一个由 3 个坐标值构成的数据序列。 AS(SS1,··· ,SSn, action) SS1,··· ,SSn AS1 AS2 再定义行为训练序列组 , 其中 是 n 个位置传感器数据序列组,每 个 SS 包含 3 个传感器值;action 表示当前行为的类 型,0 表示非跌倒,1 表示跌倒,2 表示接近跌倒。 图 1 给出了个体包含两个位置传感器时,分别处于 非跌倒和跌倒状态时所对应行为训练序列组的示意 图,其中 对应非跌倒状态, 对应跌倒状态。 由此,由同一时刻的所有位置传感器所采集数 据和当前的行为类型构建了行为训练序列组,作为 RNN 的输入,利用 RNN 能发现和抽象输入序列中 各单元关联关系的优势,获取多个位置传感器之间 关联关系的抽象,为提高跌倒检测的准确率和适应 能力提供基础。 2.2 用于跌倒检测的 RNN 训练算法 本文以 AS 为单位,将 AS 包含的每个 SS 中的 3 个传感器数值以及 action 作为独立输入单元,然 后将该独立输入单元作为输入层的输入用于跌倒检 测的 RNN 的训练,输出层计算行为训练序列组当 前的概率 pt,并统计每个 AS 的总概率 P 作为训练 和检测的依据。 用于跌倒检测的 RNN 如图 2 所示,其中 xt 表 示所有行为训练序列组 AS 中第 t 个输入项,yt 表示 第 t 个输入所对应输出向量,U 表示输入层与隐藏 层之间的权值矩阵,V 表示隐藏层与输出层之间的 权值矩阵,W 表示隐藏层与上一次隐藏层之间的权 值矩阵,P 表示 AS 所对应的概率[34]。 训练用于跌倒检测 RNN 之前,将 t 的值初始化 为 0,然后将 yt 的值也初始化为 0,同时随机初始化 U、V 和 W。 对行为训练序列组 AS 中每个输入单元 xt,使 用式 (1) 更新隐藏层,其中 f 是 sigmoid 函数,计算 方式如式 (2);sigmoid 函数的作用是引入随机性,同 时将结果的值映射到 (0, 1)。 st = f(Uxt +W st−1) (1) f(z) = 1/(1+e −z ) (2) 然后使用式 (3) 更新输出层,其中 g 是 softmax 函数,计算方式如式 (4);softmax 函数能使输出值 在 (0,1),且所有输出值的和为 1,同时使得输出值 向 1 或 0 靠近,从而为分类提供方便。 yt = g(V st) (3) g(zm) = e zm ∑ k e zk (4) 用 eo 表示输出层的误差,对 AS 中的每个单元 使用式 (5) 进行计算,其中 dt 是 AS 对应的目标输 出向量,yt 是当前用于跌倒检测 RNN 实际输出 向量。 eo(t) = dt − yt (5) 接着使用式 (6) 计算隐藏层的误差 eh,其中 dh 使用式 (7) 进行计算。 eh(t) = dh(eo(t) TV,t) (6) dh(x,t) = xst(1− st) (7) 在 RNN 的训练过程中,需要将隐藏层的误差 进行递归传递。在每个 AS 训练结束后,使用式 (8) 递归反向传播误差,传播的长度与 AS 包含的单元 个数相等。 eh(t−τ−1) = dh(eh(t−τ) TW,t−τ−1) (8) 此外,针对 AS 中的每个输入单元,使用式 (9) 更新隐藏层与输出层之间的权重矩阵,使用式 (10) 更新输入层与隐藏层之间的权重矩阵,使用式 (11) 更新上一次隐藏层与当前隐藏层之间的权重矩阵。 ѹ㒚ьᙋஔ1 ѹ㒚ьᙋஔ2 AS1 (XS1 ,YS1 ,ZS1 ,XS2 ,YS2 ,ZS2 ,0) AS2 (XS1 ′,YS1 ′,ZS1 ′,XS2 ′,YS2 ′,ZS2 ′,1) SS1 (XS1 ,YS1 ,ZS1 ) SS2 (XS2 ,YS2 ,ZS2 ) SS1 ′(XS1 ′,YS1 ′,ZS1 ′) SS2 ′(XS2 ′,YS2 ′,ZS2 ′) ͖ѿ1 图 1 位置传感器序列产生行为训练序列组 AS 示意图 Fig. 1 AS schematic of the position sensor sequence generates the behavior training sequence group AS 上一次 隐藏层st−1 保存上一次隐藏层 输入层xt 隐藏层st 输入层yt 总概率P U W V 图 2 用于跌倒检测的 RNN 示意图 Fig. 2 RNN schematic for fall detection ·382· 智 能 系 统 学 报 第 13 卷