正在加载图片...
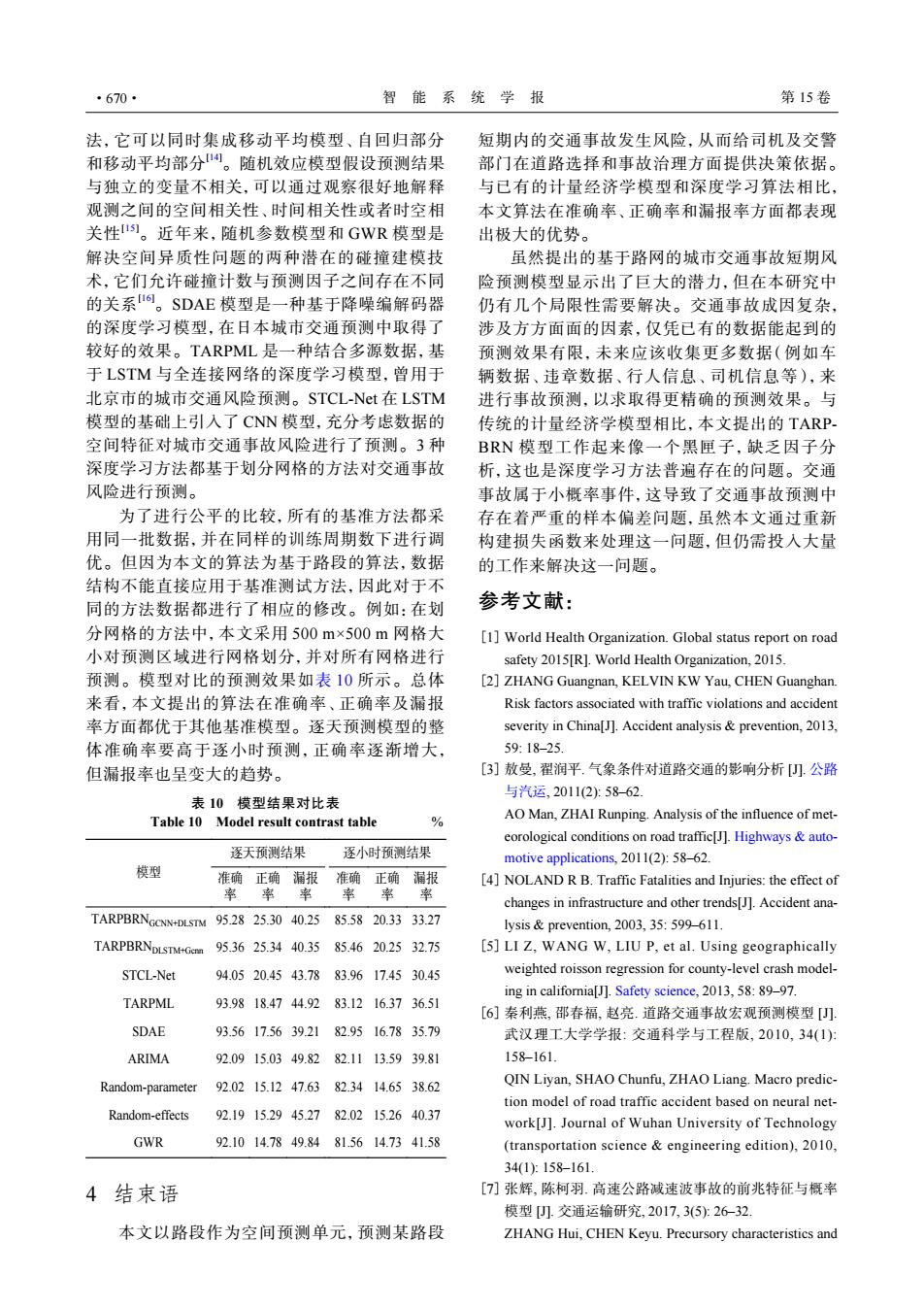
·670· 智能系统学报 第15卷 法,它可以同时集成移动平均模型、自回归部分 短期内的交通事故发生风险,从而给司机及交警 和移动平均部分。随机效应模型假设预测结果 部门在道路选择和事故治理方面提供决策依据。 与独立的变量不相关,可以通过观察很好地解释 与已有的计量经济学模型和深度学习算法相比, 观测之间的空间相关性、时间相关性或者时空相 本文算法在准确率、正确率和漏报率方面都表现 关性1。近年来,随机参数模型和GWR模型是 出极大的优势。 解决空间异质性问题的两种潜在的碰撞建模技 虽然提出的基于路网的城市交通事故短期风 术,它们允许碰撞计数与预测因子之间存在不同 险预测模型显示出了巨大的潜力,但在本研究中 的关系。SDAE模型是一种基于降噪编解码器 仍有几个局限性需要解决。交通事故成因复杂, 的深度学习模型,在日本城市交通预测中取得了 涉及方方面面的因素,仅凭已有的数据能起到的 较好的效果。TARPML是一种结合多源数据,基 预测效果有限,未来应该收集更多数据(例如车 于LSTM与全连接网络的深度学习模型,曾用于 辆数据、违章数据、行人信息、司机信息等),来 北京市的城市交通风险预测。STCL-Net在LSTM 进行事故预测,以求取得更精确的预测效果。与 模型的基础上引入了CNN模型,充分考虑数据的 传统的计量经济学模型相比,本文提出的TARP. 空间特征对城市交通事故风险进行了预测。3种 BRN模型工作起来像一个黑匣子,缺乏因子分 深度学习方法都基于划分网格的方法对交通事故 析,这也是深度学习方法普遍存在的问题。交通 风险进行预测。 事故属于小概率事件,这导致了交通事故预测中 为了进行公平的比较,所有的基准方法都采 存在着严重的样本偏差问题,虽然本文通过重新 用同一批数据,并在同样的训练周期数下进行调 构建损失函数来处理这一问题,但仍需投人大量 优。但因为本文的算法为基于路段的算法,数据 的工作来解决这一问题。 结构不能直接应用于基准测试方法,因此对于不 同的方法数据都进行了相应的修改。例如:在划 参考文献: 分网格的方法中,本文采用500m×500m网格大 [1]World Health Organization.Global status report on road 小对预测区域进行网格划分,并对所有网格进行 safety 2015[R].World Health Organization,2015 预测。模型对比的预测效果如表10所示。总体 [2]ZHANG Guangnan,KELVIN KW Yau,CHEN Guanghan. 来看,本文提出的算法在准确率、正确率及漏报 Risk factors associated with traffic violations and accident 率方面都优于其他基准模型。逐天预测模型的整 severity in China[J].Accident analysis prevention,2013. 体准确率要高于逐小时预测,正确率逐渐增大, 59:18-25. 但漏报率也呈变大的趋势。 [3]敖曼,翟润平.气象条件对道路交通的影响分析[.公路 与汽运,2011(2):58-62, 表10模型结果对比表 Table 10 Model result contrast table % AO Man,ZHAI Runping.Analysis of the influence of met- eorological conditions on road traffic[J].Highways auto 逐天预测结果 逐小时预测结果 motive applications,2011(2):58-62 模型 准确正确漏报准确正确漏报 [4]NOLAND R B.Traffic Fatalities and Injuries:the effect of 率 率 率率率 changes in infrastructure and other trends[J].Accident ana- TARPBRNGCNN+DLSTM 95.2825.3040.2585.5820.3333.27 lysis&prevention,2003,35:599-611. TARPBRNDLSTM+Gem 95.3625.3440.35 85.46202532.75 [5]LI Z,WANG W,LIU P,et al.Using geographically STCL-Net 94.0520.4543.7883.9617.4530.45 weighted roisson regression for county-level crash model ing in california[J].Safety science,2013,58:89-97 TARPML 93.9818.4744.9283.1216.3736.51 [6]秦利燕,邵春福,赵亮.道路交通事故宏观预测模型[), SDAE 93.5617.5639.2182.9516.7835.79 武汉理工大学学报:交通科学与工程版,2010,34(1): ARIMA 92.0915.0349.8282.1113.5939.81 158-161. Random-parameter 92.0215.1247.6382.3414.6538.62 QIN Liyan,SHAO Chunfu,ZHAO Liang.Macro predic- tion model of road traffic accident based on neural net- Random-effects 92.1915.2945.2782.0215.2640.37 work[J].Journal of Wuhan University of Technology GWR 92.1014.7849.8481.5614.7341.58 (transportation science engineering edition),2010. 34(1):158-161. 4结束语 [7]张辉,陈柯羽.高速公路减速波事故的前兆特征与概率 模型).交通运输研究,2017,35):26-32 本文以路段作为空间预测单元,预测某路段 ZHANG Hui,CHEN Keyu.Precursory characteristics and法,它可以同时集成移动平均模型、自回归部分 和移动平均部分[14]。随机效应模型假设预测结果 与独立的变量不相关,可以通过观察很好地解释 观测之间的空间相关性、时间相关性或者时空相 关性[15]。近年来,随机参数模型和 GWR 模型是 解决空间异质性问题的两种潜在的碰撞建模技 术,它们允许碰撞计数与预测因子之间存在不同 的关系[16]。SDAE 模型是一种基于降噪编解码器 的深度学习模型,在日本城市交通预测中取得了 较好的效果。TARPML 是一种结合多源数据,基 于 LSTM 与全连接网络的深度学习模型,曾用于 北京市的城市交通风险预测。STCL-Net 在 LSTM 模型的基础上引入了 CNN 模型,充分考虑数据的 空间特征对城市交通事故风险进行了预测。3 种 深度学习方法都基于划分网格的方法对交通事故 风险进行预测。 为了进行公平的比较,所有的基准方法都采 用同一批数据,并在同样的训练周期数下进行调 优。但因为本文的算法为基于路段的算法,数据 结构不能直接应用于基准测试方法,因此对于不 同的方法数据都进行了相应的修改。例如:在划 分网格的方法中,本文采用 500 m×500 m 网格大 小对预测区域进行网格划分,并对所有网格进行 预测。模型对比的预测效果如表 10 所示。总体 来看,本文提出的算法在准确率、正确率及漏报 率方面都优于其他基准模型。逐天预测模型的整 体准确率要高于逐小时预测,正确率逐渐增大, 但漏报率也呈变大的趋势。 表 10 模型结果对比表 Table 10 Model result contrast table % 模型 逐天预测结果 逐小时预测结果 准确 率 正确 率 漏报 率 准确 率 正确 率 漏报 率 TARPBRNGCNN+DLSTM 95.28 25.30 40.25 85.58 20.33 33.27 TARPBRNDLSTM+Gcnn 95.36 25.34 40.35 85.46 20.25 32.75 STCL-Net 94.05 20.45 43.78 83.96 17.45 30.45 TARPML 93.98 18.47 44.92 83.12 16.37 36.51 SDAE 93.56 17.56 39.21 82.95 16.78 35.79 ARIMA 92.09 15.03 49.82 82.11 13.59 39.81 Random-parameter 92.02 15.12 47.63 82.34 14.65 38.62 Random-effects 92.19 15.29 45.27 82.02 15.26 40.37 GWR 92.10 14.78 49.84 81.56 14.73 41.58 4 结束语 本文以路段作为空间预测单元,预测某路段 短期内的交通事故发生风险,从而给司机及交警 部门在道路选择和事故治理方面提供决策依据。 与已有的计量经济学模型和深度学习算法相比, 本文算法在准确率、正确率和漏报率方面都表现 出极大的优势。 虽然提出的基于路网的城市交通事故短期风 险预测模型显示出了巨大的潜力,但在本研究中 仍有几个局限性需要解决。交通事故成因复杂, 涉及方方面面的因素,仅凭已有的数据能起到的 预测效果有限,未来应该收集更多数据(例如车 辆数据、违章数据、行人信息、司机信息等),来 进行事故预测,以求取得更精确的预测效果。与 传统的计量经济学模型相比,本文提出的 TARPBRN 模型工作起来像一个黑匣子,缺乏因子分 析,这也是深度学习方法普遍存在的问题。交通 事故属于小概率事件,这导致了交通事故预测中 存在着严重的样本偏差问题,虽然本文通过重新 构建损失函数来处理这一问题,但仍需投入大量 的工作来解决这一问题。 参考文献: World Health Organization. Global status report on road safety 2015[R]. World Health Organization, 2015. [1] ZHANG Guangnan, KELVIN KW Yau, CHEN Guanghan. Risk factors associated with traffic violations and accident severity in China[J]. Accident analysis & prevention, 2013, 59: 18–25. [2] 敖曼, 翟润平. 气象条件对道路交通的影响分析 [J]. 公路 与汽运, 2011(2): 58–62. AO Man, ZHAI Runping. Analysis of the influence of meteorological conditions on road traffic[J]. Highways & automotive applications, 2011(2): 58–62. [3] NOLAND R B. Traffic Fatalities and Injuries: the effect of changes in infrastructure and other trends[J]. Accident analysis & prevention, 2003, 35: 599–611. [4] LI Z, WANG W, LIU P, et al. Using geographically weighted roisson regression for county-level crash modeling in california[J]. Safety science, 2013, 58: 89–97. [5] 秦利燕, 邵春福, 赵亮. 道路交通事故宏观预测模型 [J]. 武汉理工大学学报: 交通科学与工程版, 2010, 34(1): 158–161. QIN Liyan, SHAO Chunfu, ZHAO Liang. Macro prediction model of road traffic accident based on neural network[J]. Journal of Wuhan University of Technology (transportation science & engineering edition), 2010, 34(1): 158–161. [6] 张辉, 陈柯羽. 高速公路减速波事故的前兆特征与概率 模型 [J]. 交通运输研究, 2017, 3(5): 26–32. ZHANG Hui, CHEN Keyu. Precursory characteristics and [7] ·670· 智 能 系 统 学 报 第 15 卷