正在加载图片...
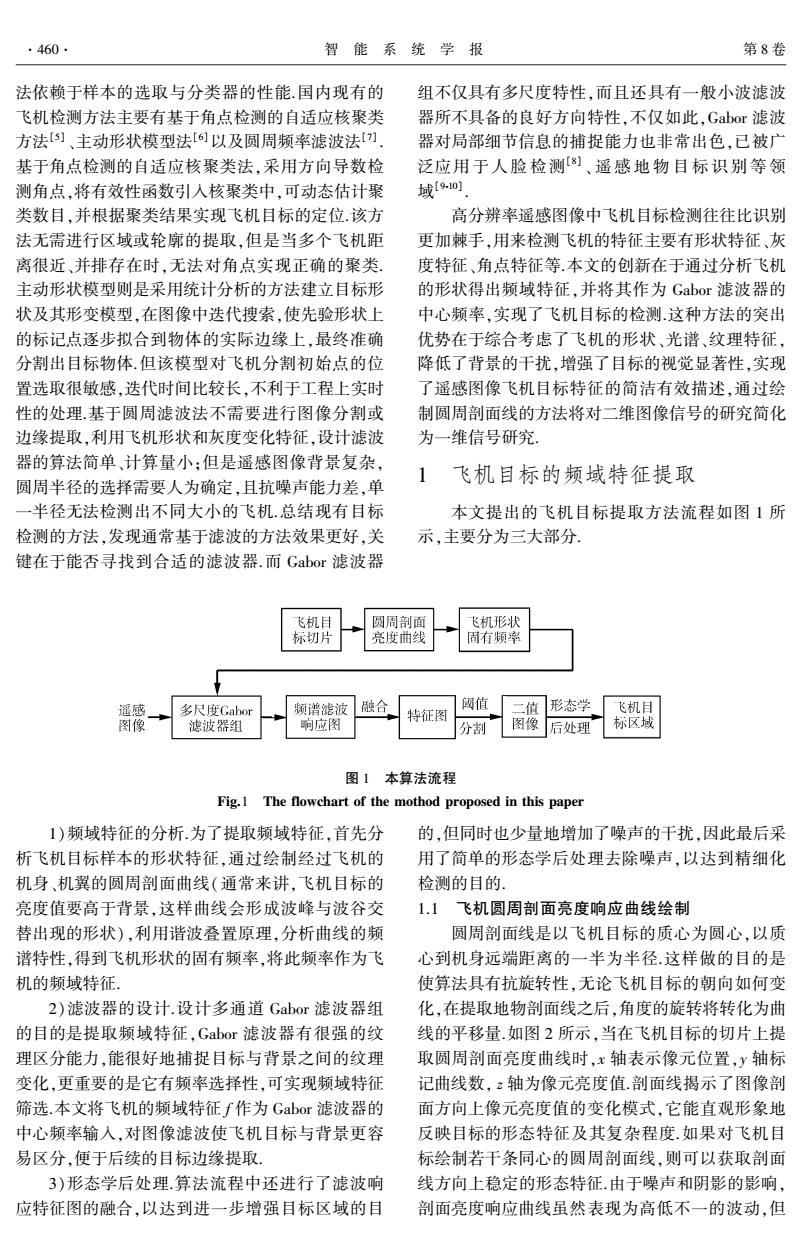
·460. 智能系统学报 第8卷 法依赖于样本的选取与分类器的性能.国内现有的 组不仅具有多尺度特性,而且还具有一般小波滤波 飞机检测方法主要有基于角点检测的自适应核聚类 器所不具备的良好方向特性,不仅如此,Gabor滤波 方法)、主动形状模型法[6以及圆周频率滤波法[), 器对局部细节信息的捕捉能力也非常出色,已被广 基于角点检测的自适应核聚类法,采用方向导数检 泛应用于人脸检测[8】、遥感地物目标识别等领 测角点,将有效性函数引入核聚类中,可动态估计聚 域[901 类数目,并根据聚类结果实现飞机目标的定位.该方 高分辨率遥感图像中飞机目标检测往往比识别 法无需进行区域或轮廓的提取,但是当多个飞机距 更加棘手,用来检测飞机的特征主要有形状特征、灰 离很近、并排存在时,无法对角点实现正确的聚类 度特征、角点特征等.本文的创新在于通过分析飞机 主动形状模型则是采用统计分析的方法建立目标形 的形状得出频域特征,并将其作为Gabor滤波器的 状及其形变模型,在图像中迭代搜索,使先验形状上 中心频率,实现了飞机目标的检测这种方法的突出 的标记点逐步拟合到物体的实际边缘上,最终准确 优势在于综合考虑了飞机的形状、光谱、纹理特征, 分割出目标物体.但该模型对飞机分割初始点的位 降低了背景的干扰,增强了目标的视觉显著性,实现 置选取很敏感,迭代时间比较长,不利于工程上实时 了遥感图像飞机目标特征的简洁有效描述,通过绘 性的处理.基于圆周滤波法不需要进行图像分割或 制圆周剖面线的方法将对二维图像信号的研究简化 边缘提取,利用飞机形状和灰度变化特征,设计滤波 为一维信号研究 器的算法简单、计算量小;但是遥感图像背景复杂, 1 圆周半径的选择需要人为确定,且抗噪声能力差,单 飞机目标的频域特征提取 一半径无法检测出不同大小的飞机.总结现有目标 本文提出的飞机目标提取方法流程如图1所 检测的方法,发现通常基于滤波的方法效果更好,关 示,主要分为三大部分 键在于能否寻找到合适的滤波器.而Gabor滤波器 飞机目 圆周剖面 飞机形状 标切片 亮度曲线 固有频率 遥感 多尺度Gabor 频谱滤波 融合 阈值 特征图 二值 形态学 飞机目 图像 滤波器组 响应图 分制 图像后处理 标区域 图1本算法流程 Fig.1 The flowchart of the mothod proposed in this paper 1)频域特征的分析.为了提取频域特征,首先分 的,但同时也少量地增加了噪声的干扰,因此最后采 析飞机目标样本的形状特征,通过绘制经过飞机的 用了简单的形态学后处理去除噪声,以达到精细化 机身、机翼的圆周剖面曲线(通常来讲,飞机目标的 检测的目的, 亮度值要高于背景,这样曲线会形成波峰与波谷交 1.1飞机圆周剖面亮度响应曲线绘制 替出现的形状),利用谐波叠置原理,分析曲线的频 圆周剖面线是以飞机目标的质心为圆心,以质 谱特性,得到飞机形状的固有频率,将此频率作为飞 心到机身远端距离的一半为半径.这样做的目的是 机的频域特征. 使算法具有抗旋转性,无论飞机目标的朝向如何变 2)滤波器的设计.设计多通道Gabor滤波器组 化,在提取地物剖面线之后,角度的旋转将转化为曲 的目的是提取频域特征,Gabor滤波器有很强的纹 线的平移量.如图2所示,当在飞机目标的切片上提 理区分能力,能很好地捕捉目标与背景之间的纹理 取圆周剖面亮度曲线时,x轴表示像元位置,y轴标 变化,更重要的是它有频率选择性,可实现频域特征 记曲线数,z轴为像元亮度值.剖面线揭示了图像剖 筛选.本文将飞机的频域特征f作为Gabor滤波器的 面方向上像元亮度值的变化模式,它能直观形象地 中心频率输入,对图像滤波使飞机目标与背景更容 反映目标的形态特征及其复杂程度.如果对飞机目 易区分,便于后续的目标边缘提取 标绘制若干条同心的圆周剖面线,则可以获取剖面 3)形态学后处理.算法流程中还进行了滤波响 线方向上稳定的形态特征.由于噪声和阴影的影响, 应特征图的融合,以达到进一步增强目标区域的目 剖面亮度响应曲线虽然表现为高低不一的波动,但法依赖于样本的选取与分类器的性能.国内现有的 飞机检测方法主要有基于角点检测的自适应核聚类 方法[5] 、主动形状模型法[6]以及圆周频率滤波法[7] . 基于角点检测的自适应核聚类法ꎬ采用方向导数检 测角点ꎬ将有效性函数引入核聚类中ꎬ可动态估计聚 类数目ꎬ并根据聚类结果实现飞机目标的定位.该方 法无需进行区域或轮廓的提取ꎬ但是当多个飞机距 离很近、并排存在时ꎬ无法对角点实现正确的聚类. 主动形状模型则是采用统计分析的方法建立目标形 状及其形变模型ꎬ在图像中迭代搜索ꎬ使先验形状上 的标记点逐步拟合到物体的实际边缘上ꎬ最终准确 分割出目标物体.但该模型对飞机分割初始点的位 置选取很敏感ꎬ迭代时间比较长ꎬ不利于工程上实时 性的处理.基于圆周滤波法不需要进行图像分割或 边缘提取ꎬ利用飞机形状和灰度变化特征ꎬ设计滤波 器的算法简单、计算量小ꎻ但是遥感图像背景复杂ꎬ 圆周半径的选择需要人为确定ꎬ且抗噪声能力差ꎬ单 一半径无法检测出不同大小的飞机.总结现有目标 检测的方法ꎬ发现通常基于滤波的方法效果更好ꎬ关 键在于能否寻找到合适的滤波器.而 Gabor 滤波器 组不仅具有多尺度特性ꎬ而且还具有一般小波滤波 器所不具备的良好方向特性ꎬ不仅如此ꎬGabor 滤波 器对局部细节信息的捕捉能力也非常出色ꎬ已被广 泛应用 于 人 脸 检 测[8] 、 遥 感 地 物 目 标 识 别 等 领 域[9 ̄10] . 高分辨率遥感图像中飞机目标检测往往比识别 更加棘手ꎬ用来检测飞机的特征主要有形状特征、灰 度特征、角点特征等.本文的创新在于通过分析飞机 的形状得出频域特征ꎬ并将其作为 Gabor 滤波器的 中心频率ꎬ实现了飞机目标的检测.这种方法的突出 优势在于综合考虑了飞机的形状、光谱、纹理特征ꎬ 降低了背景的干扰ꎬ增强了目标的视觉显著性ꎬ实现 了遥感图像飞机目标特征的简洁有效描述ꎬ通过绘 制圆周剖面线的方法将对二维图像信号的研究简化 为一维信号研究. 1 飞机目标的频域特征提取 本文提出的飞机目标提取方法流程如图 1 所 示ꎬ主要分为三大部分. 图 1 本算法流程 Fig.1 The flowchart of the mothod proposed in this paper 1)频域特征的分析.为了提取频域特征ꎬ首先分 析飞机目标样本的形状特征ꎬ通过绘制经过飞机的 机身、机翼的圆周剖面曲线(通常来讲ꎬ飞机目标的 亮度值要高于背景ꎬ这样曲线会形成波峰与波谷交 替出现的形状)ꎬ利用谐波叠置原理ꎬ分析曲线的频 谱特性ꎬ得到飞机形状的固有频率ꎬ将此频率作为飞 机的频域特征. 2)滤波器的设计.设计多通道 Gabor 滤波器组 的目的是提取频域特征ꎬGabor 滤波器有很强的纹 理区分能力ꎬ能很好地捕捉目标与背景之间的纹理 变化ꎬ更重要的是它有频率选择性ꎬ可实现频域特征 筛选.本文将飞机的频域特征 f 作为 Gabor 滤波器的 中心频率输入ꎬ对图像滤波使飞机目标与背景更容 易区分ꎬ便于后续的目标边缘提取. 3)形态学后处理.算法流程中还进行了滤波响 应特征图的融合ꎬ以达到进一步增强目标区域的目 的ꎬ但同时也少量地增加了噪声的干扰ꎬ因此最后采 用了简单的形态学后处理去除噪声ꎬ以达到精细化 检测的目的. 1.1 飞机圆周剖面亮度响应曲线绘制 圆周剖面线是以飞机目标的质心为圆心ꎬ以质 心到机身远端距离的一半为半径.这样做的目的是 使算法具有抗旋转性ꎬ无论飞机目标的朝向如何变 化ꎬ在提取地物剖面线之后ꎬ角度的旋转将转化为曲 线的平移量.如图 2 所示ꎬ当在飞机目标的切片上提 取圆周剖面亮度曲线时ꎬx 轴表示像元位置ꎬy 轴标 记曲线数ꎬ z 轴为像元亮度值.剖面线揭示了图像剖 面方向上像元亮度值的变化模式ꎬ它能直观形象地 反映目标的形态特征及其复杂程度.如果对飞机目 标绘制若干条同心的圆周剖面线ꎬ则可以获取剖面 线方向上稳定的形态特征.由于噪声和阴影的影响ꎬ 剖面亮度响应曲线虽然表现为高低不一的波动ꎬ但 460 智 能 系 统 学 报 第 8 卷