正在加载图片...
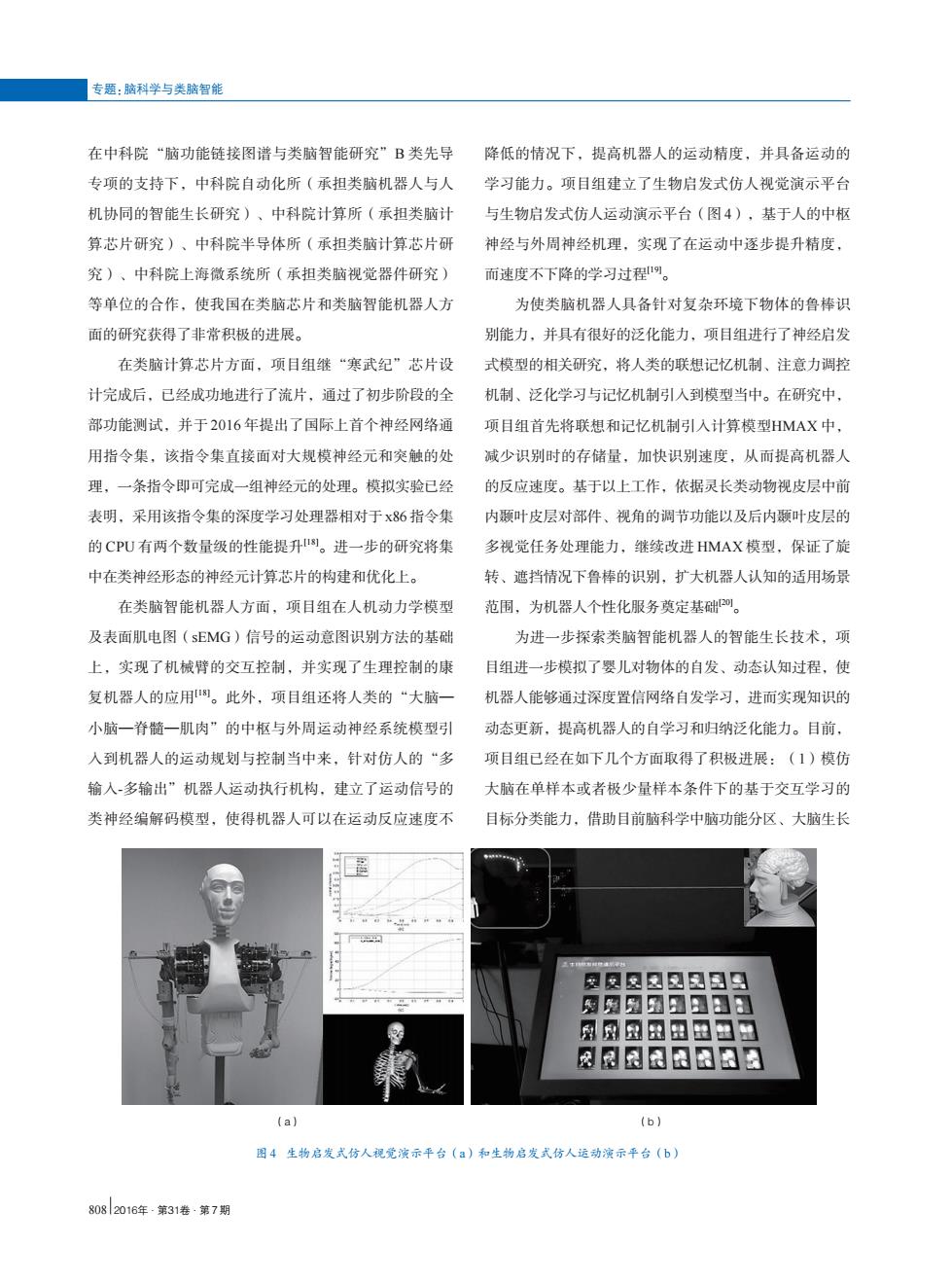
专题:脑科学与类脑智能 在中科院“脑功能链接图谱与类脑智能研究”B类先导降低的情况下,提高机器人的运动精度,并具备运动的 专项的支持下,中科院自动化所(承担类脑机器人与人 学习能力。项目组建立了生物启发式仿人视觉演示平台 机协同的智能生长研究)、中科院计算所(承担类脑计 与生物启发式仿人运动演示平台(图4),基于人的中枢 算芯片研究)、中科院半导体所(承担类脑计算芯片研 神经与外周神经机理,实现了在运动中逐步提升精度。 究)、中科院上海微系统所(承担类脑视觉器件研究) 而速度不下降的学习过程。 等单位的合作,使我国在类脑芯片和类脑智能机器人方 为使类脑机器人具备针对复茶环境下物体的鲁棒识 面的研究获得了非常积极的进展。 别能力,并具有很好的泛化能力,项目组进行了神经启发 在类脑计算芯片方面,项目组继“寒武纪”芯片设 式模型的相关研究,将人类的联想记忆机制、注意力调控 计完成后,已经成功地进行了流片,通过了初步阶段的全 机制、泛化学习与记忆机制引入到模型当中。在研究中, 部功能测试,并于2016年提出了国际上首个神经网络通 项目组首先将联想和记忆机制引入计算模型HMAX中。 用指令集,该指令集直接面对大规模神经元和突触的处 减少识别时的存储量,加快识别速度,从而提高机器人 理,一条指令即可完成一组神经元的处理。模拟实验已经 的反应速度。基于以上工作,依据灵长类动物视皮层中前 表明,采用该指令集的深度学习处理器相对于x86指令集 内颗叶皮层对部件、视角的调节功能以及后内颜叶皮层的 的CpU有两个数量级的性能提升。进一步的研究将舆 多视觉任务处理能力,维续改进HMAX模型,保证了旋 中在类神经形态的神经元计算芯片的构建和优化上。 转、遮挡情况下鲁棒的识别,扩大机器人认知的适用场景 在类脑智能机器人方面,项目组在人机动力学模型 范围,为机器人个性化服务莫定基础四。 及表面肌电图(sMG)信号的运动意图识别方法的基础 为进一步探索类脑智能机器人的智能生长技术,项 上,实现了机械臂的交互控制,并实现了生理控制的康 目组进一步模拟了婴儿对物体的自发、动态认知过程,使 复机器人的应用。此外,项目组还将人类的“大脑一 机器人能够通过深度置信网络自发学习.,进面实现知识的 小脑一脊髓一肌肉”的中枢与外周运动神经系统模型引 动态更新,提高机器人的自学习和归纳泛化能力。目前, 人到机器人的运动规划与控制当中来,针对仿人的“多 项目组已经在如下儿个方面取得了积极进展:(1)模仿 输入多输出”机器人运动执行机构建立了运动信号的 大脑在单样本或者极少量样本条件下的基于交互学习的 类神经编解码模型,使得机器人可以在运动反应速度不 目标分类能力,借助目前脑科学中脑功能分区、大脑生长 恩夏恩因叉民日马 因扇别团围再雨用 星星图田田日日日 只图园因日日日因 (a】 图4生物启发式仿人视觉演示平台(a)和生物启发式仿人运动演示平台(b)】 80g2016年第31卷第7期808 2016年 . 第31卷 . 第 7期 专题:脑科学与类脑智能 在中科院“脑功能链接图谱与类脑智能研究”B 类先导 专项的支持下,中科院自动化所(承担类脑机器人与人 机协同的智能生长研究)、中科院计算所(承担类脑计 算芯片研究)、中科院半导体所(承担类脑计算芯片研 究)、中科院上海微系统所(承担类脑视觉器件研究) 等单位的合作,使我国在类脑芯片和类脑智能机器人方 面的研究获得了非常积极的进展。 在类脑计算芯片方面,项目组继“寒武纪”芯片设 计完成后,已经成功地进行了流片,通过了初步阶段的全 部功能测试,并于 2016 年提出了国际上首个神经网络通 用指令集,该指令集直接面对大规模神经元和突触的处 理,一条指令即可完成一组神经元的处理。模拟实验已经 表明,采用该指令集的深度学习处理器相对于 x86 指令集 的 CPU 有两个数量级的性能提升[18]。进一步的研究将集 中在类神经形态的神经元计算芯片的构建和优化上。 在类脑智能机器人方面,项目组在人机动力学模型 及表面肌电图(sEMG)信号的运动意图识别方法的基础 上,实现了机械臂的交互控制,并实现了生理控制的康 复机器人的应用[18]。此外,项目组还将人类的“大脑— 小脑—脊髓—肌肉”的中枢与外周运动神经系统模型引 入到机器人的运动规划与控制当中来,针对仿人的“多 输入-多输出”机器人运动执行机构,建立了运动信号的 类神经编解码模型,使得机器人可以在运动反应速度不 降低的情况下,提高机器人的运动精度,并具备运动的 学习能力。项目组建立了生物启发式仿人视觉演示平台 与生物启发式仿人运动演示平台(图 4),基于人的中枢 神经与外周神经机理,实现了在运动中逐步提升精度, 而速度不下降的学习过程[19]。 为使类脑机器人具备针对复杂环境下物体的鲁棒识 别能力,并具有很好的泛化能力,项目组进行了神经启发 式模型的相关研究,将人类的联想记忆机制、注意力调控 机制、泛化学习与记忆机制引入到模型当中。在研究中, 项目组首先将联想和记忆机制引入计算模型HMAX 中, 减少识别时的存储量,加快识别速度,从而提高机器人 的反应速度。基于以上工作,依据灵长类动物视皮层中前 内颞叶皮层对部件、视角的调节功能以及后内颞叶皮层的 多视觉任务处理能力,继续改进 HMAX 模型,保证了旋 转、遮挡情况下鲁棒的识别,扩大机器人认知的适用场景 范围,为机器人个性化服务奠定基础[20]。 为进一步探索类脑智能机器人的智能生长技术,项 目组进一步模拟了婴儿对物体的自发、动态认知过程,使 机器人能够通过深度置信网络自发学习,进而实现知识的 动态更新,提高机器人的自学习和归纳泛化能力。目前, 项目组已经在如下几个方面取得了积极进展:(1)模仿 大脑在单样本或者极少量样本条件下的基于交互学习的 目标分类能力,借助目前脑科学中脑功能分区、大脑生长 (a) (b) 图 4 生物启发式仿人视觉演示平台(a)和生物启发式仿人运动演示平台(b)