正在加载图片...
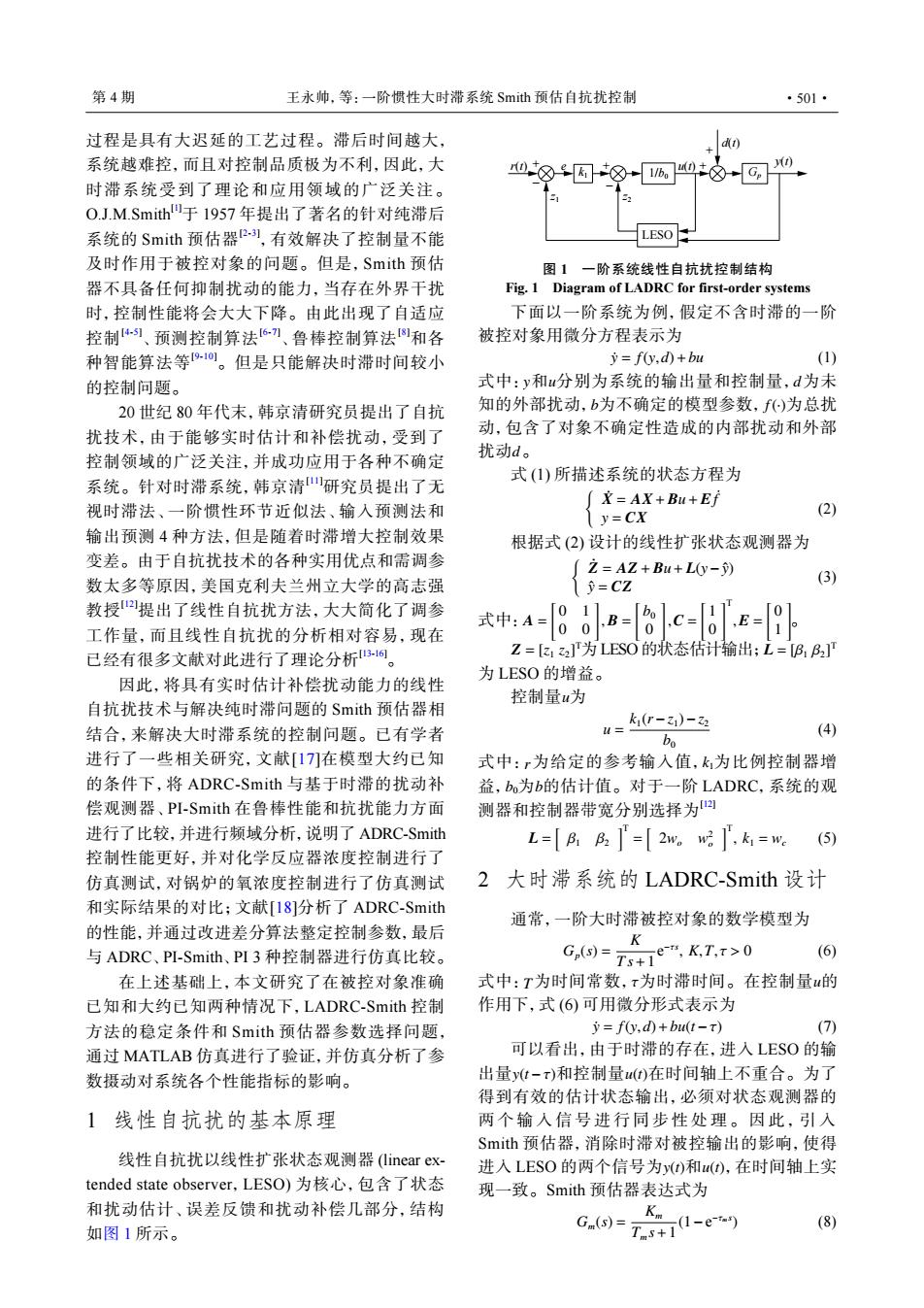
第4期 王永帅,等:一阶惯性大时滞系统Smith预估自抗扰控制 ·501· 过程是具有大迟延的工艺过程。滞后时间越大, d1) 系统越难控,而且对控制品质极为不利,因此,大 时滞系统受到了理论和应用领域的广泛关注。 0.J.M.Smith于1957年提出了著名的针对纯滞后 系统的Smith预估器-),有效解决了控制量不能 LESO 及时作用于被控对象的问题。但是,Smith预估 图1一阶系统线性自抗扰控制结构 器不具备任何抑制扰动的能力,当存在外界干扰 Fig.1 Diagram of LADRC for first-order systems 时,控制性能将会大大下降。由此出现了自适应 下面以一阶系统为例,假定不含时滞的一阶 控制、预测控制算法6-刀、鲁棒控制算法和各 被控对象用微分方程表示为 种智能算法等。但是只能解决时滞时间较小 y=f(y,d)+bu (1) 的控制问题。 式中:y和分别为系统的输出量和控制量,d为未 20世纪80年代末,韩京清研究员提出了自抗 知的外部扰动,b为不确定的模型参数,f)为总扰 扰技术,由于能够实时估计和补偿扰动,受到了 动,包含了对象不确定性造成的内部扰动和外部 控制领域的广泛关注,并成功应用于各种不确定 扰动d。 系统。针对时滞系统,韩京清研究员提出了无 式(1)所描述系统的状态方程为 ∫=AX+Bu+Ef 视时滞法、一阶惯性环节近似法、输入预测法和 y=CX (2) 输出预测4种方法,但是随着时滞增大控制效果 根据式(2)设计的线性扩张状态观测器为 变差。由于自抗扰技术的各种实用优点和需调参 立=AZ+Bu+Ly-) 数太多等原因,美国克利夫兰州立大学的高志强 i=CZ (3) 教授提出了线性自抗扰方法,大大简化了调参 工作量,而且线性自抗扰的分析相对容易,现在 式中:A=8B=.c=8E= 已经有很多文献对此进行了理论分析。 Z=[Z12T为LESO的状态估计输出;L=B,B, 为LESO的增益。 因此,将具有实时估计补偿扰动能力的线性 自抗扰技术与解决纯时滞问题的Smith预估器相 控制量为 k(r-2)-2 结合,来解决大时滞系统的控制问题。已有学者 l= (4) bo 进行了一些相关研究,文献[17刀在模型大约已知 式中:r为给定的参考输入值,k为比例控制器增 的条件下,将ADRC-Smith与基于时滞的扰动补 益,b为b的估计值。对于一阶LADRC,系统的观 偿观测器、PI-Smith在鲁棒性能和抗扰能力方面 测器和控制器带宽分别选择为回 进行了比较,并进行频域分析,说明了ADRC-Smith L=[BB,=[2w。w2],k=w (5) 控制性能更好,并对化学反应器浓度控制进行了 仿真测试,对锅炉的氧浓度控制进行了仿真测试 2大时滞系统的LADRC-Smith设计 和实际结果的对比;文献[I8]分析了ADRC-Smith 通常,一阶大时滞被控对象的数学模型为 的性能,并通过改进差分算法整定控制参数,最后 K 与ADRC、PI-Smith、PI3种控制器进行仿真比较。 G,(s)=Ts+Te".K.T.>0 (6) 在上述基础上,本文研究了在被控对象准确 式中:T为时间常数,τ为时滞时间。在控制量的 已知和大约已知两种情况下,LADRC-Smith控制 作用下,式(6可用微分形式表示为 方法的稳定条件和Smith预估器参数选择问题, i=f(y,d)+bu(t-T) (7) 通过MATLAB仿真进行了验证,并仿真分析了参 可以看出,由于时滞的存在,进入LESO的输 数摄动对系统各个性能指标的影响。 出量y(t-τ)和控制量u()在时间轴上不重合。为了 得到有效的估计状态输出,必须对状态观测器的 1线性自抗扰的基本原理 两个输人信号进行同步性处理。因此,引入 Smith预估器,消除时滞对被控输出的影响,使得 线性自抗扰以线性扩张状态观测器((linear ex- 进入LESO的两个信号为y()和u(0,在时间轴上实 tended state observer,LESO)为核心,包含了状态 现一致。Smith预估器表达式为 和扰动估计、误差反馈和扰动补偿几部分,结构 如图1所示。 Gm(s)= (1- (8)过程是具有大迟延的工艺过程。滞后时间越大, 系统越难控,而且对控制品质极为不利,因此,大 时滞系统受到了理论和应用领域的广泛关注。 O.J.M.Smith[1]于 1957 年提出了著名的针对纯滞后 系统的 Smith 预估器[2-3] ,有效解决了控制量不能 及时作用于被控对象的问题。但是,Smith 预估 器不具备任何抑制扰动的能力,当存在外界干扰 时,控制性能将会大大下降。由此出现了自适应 控制[4-5] 、预测控制算法[6-7] 、鲁棒控制算法[8]和各 种智能算法等[9-10]。但是只能解决时滞时间较小 的控制问题。 20 世纪 80 年代末,韩京清研究员提出了自抗 扰技术,由于能够实时估计和补偿扰动,受到了 控制领域的广泛关注,并成功应用于各种不确定 系统。针对时滞系统,韩京清[11]研究员提出了无 视时滞法、一阶惯性环节近似法、输入预测法和 输出预测 4 种方法,但是随着时滞增大控制效果 变差。由于自抗扰技术的各种实用优点和需调参 数太多等原因,美国克利夫兰州立大学的高志强 教授[12]提出了线性自抗扰方法,大大简化了调参 工作量,而且线性自抗扰的分析相对容易,现在 已经有很多文献对此进行了理论分析[13-16]。 因此,将具有实时估计补偿扰动能力的线性 自抗扰技术与解决纯时滞问题的 Smith 预估器相 结合,来解决大时滞系统的控制问题。已有学者 进行了一些相关研究,文献[17]在模型大约已知 的条件下,将 ADRC-Smith 与基于时滞的扰动补 偿观测器、PI-Smith 在鲁棒性能和抗扰能力方面 进行了比较,并进行频域分析,说明了 ADRC-Smith 控制性能更好,并对化学反应器浓度控制进行了 仿真测试,对锅炉的氧浓度控制进行了仿真测试 和实际结果的对比;文献[18]分析了 ADRC-Smith 的性能,并通过改进差分算法整定控制参数,最后 与 ADRC、PI-Smith、PI 3 种控制器进行仿真比较。 在上述基础上,本文研究了在被控对象准确 已知和大约已知两种情况下,LADRC-Smith 控制 方法的稳定条件和 Smith 预估器参数选择问题, 通过 MATLAB 仿真进行了验证,并仿真分析了参 数摄动对系统各个性能指标的影响。 1 线性自抗扰的基本原理 线性自抗扰以线性扩张状态观测器 (linear extended state observer,LESO) 为核心,包含了状态 和扰动估计、误差反馈和扰动补偿几部分,结构 如图 1 所示。 + + LESO + − e − + y(t) Gp d(t) u(t) 1/b0 z2 z1 k1 r(t) 图 1 一阶系统线性自抗扰控制结构 Fig. 1 Diagram of LADRC for first-order systems 下面以一阶系统为例,假定不含时滞的一阶 被控对象用微分方程表示为 y˙ = f(y,d)+bu (1) y u d b f(·) d 式中: 和 分别为系统的输出量和控制量, 为未 知的外部扰动, 为不确定的模型参数, 为总扰 动,包含了对象不确定性造成的内部扰动和外部 扰动 。 式 (1) 所描述系统的状态方程为 { X˙ = AX + Bu+ E ˙f y = CX (2) 根据式 (2) 设计的线性扩张状态观测器为 { Z˙ = AZ + Bu+ L(y−yˆ) yˆ = CZ (3) A = [ 0 1 0 0 ] ,B = [ b0 0 ] ,C = [ 1 0 ]T ,E = [ 0 1 ] 式中: 。 Z = [z1 z2] T L = [β1 β2] 为 T LESO 的状态估计输出; 为 LESO 的增益。 控制量u为 u = k1(r −z1)−z2 b0 (4) r k1 b0 b 式中: 为给定的参考输入值, 为比例控制器增 益, 为 的估计值。对于一阶 LADRC,系统的观 测器和控制器带宽分别选择为[12] L = [ β1 β2 ]T = [ 2wo w 2 o ]T , k1 = wc (5) 2 大时滞系统的 LADRC-Smith 设计 通常,一阶大时滞被控对象的数学模型为 Gp(s) = K T s+1 e −τs , K,T,τ > 0 (6) 式中: T 为时间常数,τ为时滞时间。在控制量u的 作用下,式 (6) 可用微分形式表示为 y˙ = f(y,d)+bu(t−τ) (7) y(t−τ) u(t) y(t) u(t) 可以看出,由于时滞的存在,进入 LESO 的输 出量 和控制量 在时间轴上不重合。为了 得到有效的估计状态输出,必须对状态观测器的 两个输入信号进行同步性处理。因此,引 入 Smith 预估器,消除时滞对被控输出的影响,使得 进入 LESO 的两个信号为 和 ,在时间轴上实 现一致。Smith 预估器表达式为 Gm(s) = Km Tm s+1 (1−e −τm s ) (8) 第 4 期 王永帅,等:一阶惯性大时滞系统 Smith 预估自抗扰控制 ·501·