正在加载图片...
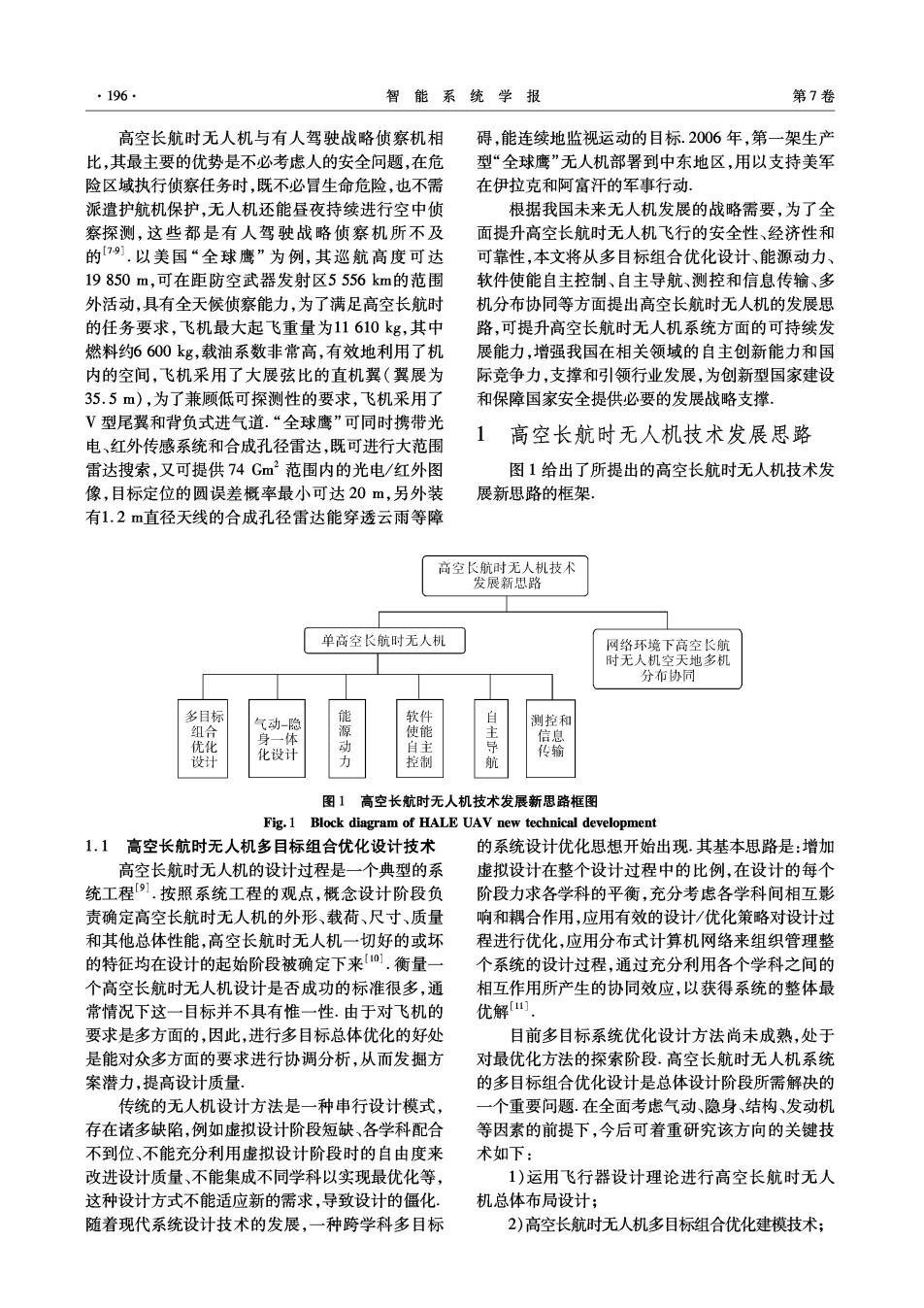
·196 智能系统学报 第7卷 高空长航时无人机与有人驾驶战略侦察机相 碍,能连续地监视运动的目标.2006年,第一架生产 比,其最主要的优势是不必考虑人的安全问题,在危 型“全球鹰”无人机部署到中东地区,用以支持美军 险区域执行侦察任务时,既不必冒生命危险,也不需 在伊拉克和阿富汗的军事行动 派遣护航机保护,无人机还能昼夜持续进行空中侦 根据我国未来无人机发展的战略需要,为了全 察探测,这些都是有人驾驶战略侦察机所不及 面提升高空长航时无人机飞行的安全性、经济性和 的9.以美国“全球鹰”为例,其巡航高度可达 可靠性,本文将从多目标组合优化设计、能源动力、 19850m,可在距防空武器发射区5556km的范围 软件使能自主控制、自主导航、测控和信息传输、多 外活动,具有全天候侦察能力,为了满足高空长航时 机分布协同等方面提出高空长航时无人机的发展思 的任务要求,飞机最大起飞重量为11610kg,其中 路,可提升高空长航时无人机系统方面的可持续发 燃料约6600kg,载油系数非常高,有效地利用了机 展能力,增强我国在相关领域的自主创新能力和国 内的空间,飞机采用了大展弦比的直机翼(翼展为 际竞争力,支撑和引领行业发展,为创新型国家建设 35.5m),为了兼顾低可探测性的要求,飞机采用了 和保障国家安全提供必要的发展战略支撑 V型尾翼和背负式进气道.“全球鹰”可同时携带光 1 电、红外传感系统和合成孔径雷达,既可进行大范围 高空长航时无人机技术发展思路 雷达搜索,又可提供74Gm2范围内的光电/红外图 图1给出了所提出的高空长航时无人机技术发 像,目标定位的圆误差概率最小可达20m,另外装 展新思路的框架, 有1.2m直径天线的合成孔径雷达能穿透云雨等障 高空长航时无人机技术 发展新思路 单高空长航时无人机 网络环境下高空长航 时无人机空天地多机 分布协同 多目标 气动 能源动力 软件 测控和 身 体 主 信息 设计 设计 航 华输 图1 高空长航时无人机技术发展新思路框图 Fig.1 Block diagram of HALE UAV new technical development 1.1高空长航时无人机多目标组合优化设计技术 的系统设计优化思想开始出现.其基本思路是:增加 高空长航时无人机的设计过程是一个典型的系 虚拟设计在整个设计过程中的比例,在设计的每个 统工程9.按照系统工程的观点,概念设计阶段负 阶段力求各学科的平衡,充分考虑各学科间相互影 责确定高空长航时无人机的外形、载荷、尺寸、质量 响和耦合作用,应用有效的设计/优化策略对设计过 和其他总体性能,高空长航时无人机一切好的或坏 程进行优化,应用分布式计算机网络来组织管理整 的特征均在设计的起始阶段被确定下来1.衡量一 个系统的设计过程,通过充分利用各个学科之间的 个高空长航时无人机设计是否成功的标准很多,通 相互作用所产生的协同效应,以获得系统的整体最 常情况下这一目标并不具有惟一性.由于对飞机的 优解四 要求是多方面的,因此,进行多目标总体优化的好处 目前多目标系统优化设计方法尚未成熟,处于 是能对众多方面的要求进行协调分析,从而发掘方 对最优化方法的探索阶段.高空长航时无人机系统 案潜力,提高设计质量. 的多目标组合优化设计是总体设计阶段所需解决的 传统的无人机设计方法是一种串行设计模式, 一个重要问题.在全面考虑气动、隐身、结构、发动机 存在诸多缺陷,例如虚拟设计阶段短缺、各学科配合 等因素的前提下,今后可着重研究该方向的关键技 不到位、不能充分利用虚拟设计阶段时的自由度来 术如下: 改进设计质量、不能集成不同学科以实现最优化等, 1)运用飞行器设计理论进行高空长航时无人 这种设计方式不能适应新的需求,导致设计的僵化 机总体布局设计; 随着现代系统设计技术的发展,一种跨学科多目标 2)高空长航时无人机多目标组合优化建模技术;