正在加载图片...
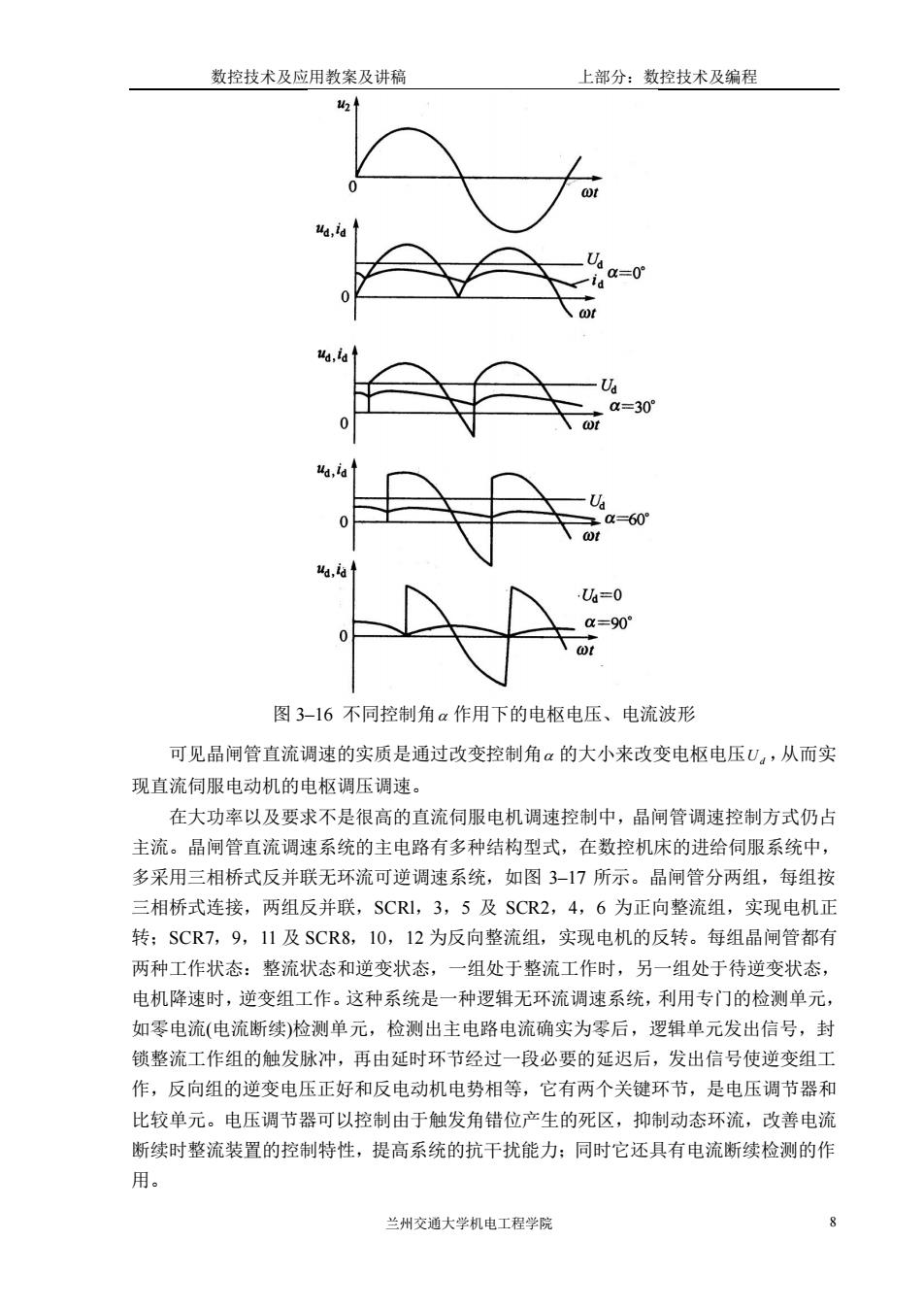
数控技术及应用教案及讲稿 上部分:数控技术及编程 2=90 图3-16不同控制角a作用下的电枢电压、电流波形 可见晶闸管直流调速的实质是通过改变控制角α的大小来改变电枢电压U,从而实 现直流伺服电动机的电枢调压调速。 在大功率以及要求不是很高的直流伺服电机调速控制中,晶闸管调速控制方式仍占 主流。晶闸管直流调速系统的主电路有多种结构型式,在数控机床的进给伺服系统中, 多采用三相桥式反并联无环流可逆调速系统,如图3-17所示。晶闸管分两组,每组按 三相桥式连接,两组反并联,SCR1,3,5及SCR2,4,6为正向整流组,实现电机正 转:SCR7,9,11及SCR8,10,12为反向整流组,实现电机的反转。每组晶闸管都有 两种工作状态:整流状态和逆变状态,一组处于整流工作时,另一组处于待逆变状态, 电机降速时,逆变组工作。这种系统是一种逻辑无环流调速系统,利用专门的检测单元, 如零电流(电流断续)检测单元,检测出主电路电流确实为零后,逻辑单元发出信号,封 锁整流工作组的触发脉冲,再由延时环节经过一段必要的延迟后,发出信号使逆变组工 作,反向组的逆变电压正好和反电动机电势相等,它有两个关键环节,是电压调节器和 比较单元。电压调节器可以控制由于触发角错位产生的死区,抑制动态环流,改善电流 断续时整流装置的控制特性,提高系统的抗干扰能力:同时它还具有电流断续检测的作 用。 兰州交通大学机电工程学院 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 8 图 3–16 不同控制角 作用下的电枢电压、电流波形 可见晶闸管直流调速的实质是通过改变控制角 的大小来改变电枢电压 U d ,从而实 现直流伺服电动机的电枢调压调速。 在大功率以及要求不是很高的直流伺服电机调速控制中,晶闸管调速控制方式仍占 主流。晶闸管直流调速系统的主电路有多种结构型式,在数控机床的进给伺服系统中, 多采用三相桥式反并联无环流可逆调速系统,如图 3–17 所示。晶闸管分两组,每组按 三相桥式连接,两组反并联,SCRl,3,5 及 SCR2,4,6 为正向整流组,实现电机正 转;SCR7,9,11 及 SCR8,10,12 为反向整流组,实现电机的反转。每组晶闸管都有 两种工作状态:整流状态和逆变状态,一组处于整流工作时,另一组处于待逆变状态, 电机降速时,逆变组工作。这种系统是一种逻辑无环流调速系统,利用专门的检测单元, 如零电流(电流断续)检测单元,检测出主电路电流确实为零后,逻辑单元发出信号,封 锁整流工作组的触发脉冲,再由延时环节经过一段必要的延迟后,发出信号使逆变组工 作,反向组的逆变电压正好和反电动机电势相等,它有两个关键环节,是电压调节器和 比较单元。电压调节器可以控制由于触发角错位产生的死区,抑制动态环流,改善电流 断续时整流装置的控制特性,提高系统的抗干扰能力;同时它还具有电流断续检测的作 用