正在加载图片...
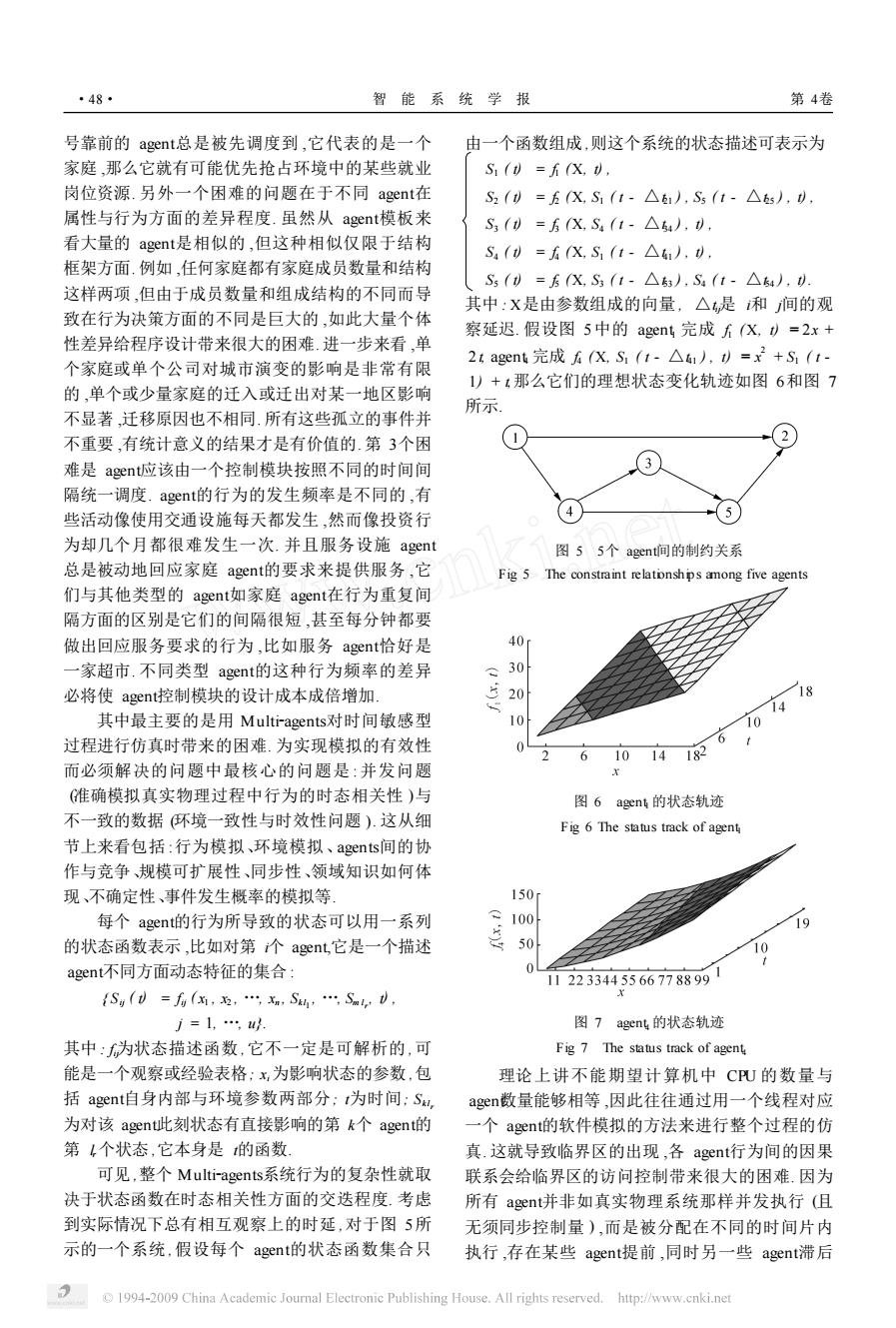
·48* 智能系统学报 第4卷 号靠前的agent总是被先调度到,它代表的是一个 由一个函数组成,则这个系统的状态描述可表示为 家庭,那么它就有可能优先抢占环境中的某些就业 S()=fX,), 岗位资源.另外一个困难的问题在于不同agent在 S2()=五XS11-△1),S(1-△5,, 属性与行为方面的差异程度.虽然从agent模板来 S3()=5X,S4(1-△5),, 看大量的agent是相似的,但这种相似仅限于结构 S4()=方X,S1(t-△4,0, 框架方面.例如,任何家庭都有家庭成员数量和结构 S()=5X,S3(1-△53),S(1-△54, 这样两项,但由于成员数量和组成结构的不同而导 其中:X是由参数组成的向量,△是和间的观 致在行为决策方面的不同是巨大的,如此大量个体 察延迟.假设图5中的agen4完成无(X,t)=2x+ 性差异给程序设计带来很大的困难.进一步来看,单 2 t agent完成i(XS,(t-△1),)=x+S,(t- 个家庭或单个公司对城市演变的影响是非常有限 1)+1那么它们的理想状态变化轨迹如图6和图7 的,单个或少量家庭的迁入或迁出对某一地区影响 不显著,迁移原因也不相同.所有这些孤立的事件并 所示. 不重要,有统计意义的结果才是有价值的.第3个困 难是agent)应该由一个控制模块按照不同的时间间 隔统一调度.agent的行为的发生频率是不同的,有 些活动像使用交通设施每天都发生,然而像投资行 为却几个月都很难发生一次.并且服务设施agent 图55个agent间的制约关系 总是被动地回应家庭agent的要求来提供服务,它 Fig 5 The constraint relatonships among five agents 们与其他类型的agent如家庭agenti在行为重复间 隔方面的区别是它们的间隔很短,甚至每分钟都要 做出回应服务要求的行为,比如服务agent恰好是 40r 一家超市.不同类型agentl的这种行为频率的差异 30 必将使agent控制模块的设计成本成倍增加. 20 1& 其中最主要的是用Multi-agents对时间敏感型 10 1014 过程进行仿真时带来的困难.为实现模拟的有效性 6 6 1014182 而必须解决的问题中最核心的问题是:并发问题 (准确模拟真实物理过程中行为的时态相关性)与 图6agen4的状态轨迹 不一致的数据环境一致性与时效性问题).这从细 Fig 6 The status track of agent 节上来看包括:行为模拟、环境模拟、agents间的协 作与竞争、规模可扩展性、同步性、领域知识如何体 现、不确定性、事件发生概率的模拟等 150 每个agent的行为所导致的状态可以用一系列 100 19 的状态函数表示,比如对第个agent,它是一个描述 50 10 agent不同方面动态特征的集合: 1122334455667788991 fSg()=f,,,xn,S,Smp刊, j=1,以 图7 agent的状态轨迹 其中:为状态描述函数,它不一定是可解析的,可 Fig 7 The status track of agent 能是一个观察或经验表格;x,为影响状态的参数,包 理论上讲不能期望计算机中CU的数量与 括agent自身内部与环境参数两部分;t为时间:S, agen数量能够相等,因此往往通过用一个线程对应 为对该agentl此刻状态有直接影响的第k个agent的 一个agent的软件模拟的方法来进行整个过程的仿 第4个状态,它本身是的函数, 真.这就导致临界区的出现,各agent行为间的因果 可见,整个Multi-agents系统行为的复杂性就取 联系会给临界区的访问控制带来很大的困难.因为 决于状态函数在时态相关性方面的交迭程度.考虑 所有agent并非如真实物理系统那样并发执行(且 到实际情况下总有相互观察上的时延,对于图5所 无须同步控制量),而是被分配在不同的时间片内 示的一个系统,假设每个agent的状态函数集合只 执行,存在某些agent提前,同时另一些agent滞后 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net号靠前的 agent总是被先调度到 ,它代表的是一个 家庭 ,那么它就有可能优先抢占环境中的某些就业 岗位资源. 另外一个困难的问题在于不同 agent在 属性与行为方面的差异程度. 虽然从 agent模板来 看大量的 agent是相似的 ,但这种相似仅限于结构 框架方面. 例如 ,任何家庭都有家庭成员数量和结构 这样两项 ,但由于成员数量和组成结构的不同而导 致在行为决策方面的不同是巨大的 ,如此大量个体 性差异给程序设计带来很大的困难. 进一步来看 ,单 个家庭或单个公司对城市演变的影响是非常有限 的 ,单个或少量家庭的迁入或迁出对某一地区影响 不显著 ,迁移原因也不相同. 所有这些孤立的事件并 不重要 ,有统计意义的结果才是有价值的. 第 3个困 难是 agent应该由一个控制模块按照不同的时间间 隔统一调度. agent的行为的发生频率是不同的 ,有 些活动像使用交通设施每天都发生 ,然而像投资行 为却几个月都很难发生一次. 并且服务设施 agent 总是被动地回应家庭 agent的要求来提供服务 ,它 们与其他类型的 agent如家庭 agent在行为重复间 隔方面的区别是它们的间隔很短 ,甚至每分钟都要 做出回应服务要求的行为 ,比如服务 agent恰好是 一家超市. 不同类型 agent的这种行为频率的差异 必将使 agent控制模块的设计成本成倍增加. 其中最主要的是用 Multi2agents对时间敏感型 过程进行仿真时带来的困难. 为实现模拟的有效性 而必须解决的问题中最核心的问题是 :并发问题 (准确模拟真实物理过程中行为的时态相关性 )与 不一致的数据 (环境一致性与时效性问题 ). 这从细 节上来看包括 :行为模拟、环境模拟、agents间的协 作与竞争、规模可扩展性、同步性、领域知识如何体 现、不确定性、事件发生概率的模拟等. 每个 agent的行为所导致的状态可以用一系列 的状态函数表示 ,比如对第 i个 agent,它是一个描述 agent不同方面动态特征的集合 : { Sij ( t) = fij ( x1 , x2 , …, xn , Sk l1 , …, Sm l r , t) , j = 1, …, u}. 其中 : fij为状态描述函数 ,它不一定是可解析的 ,可 能是一个观察或经验表格; xi 为影响状态的参数 ,包 括 agent自身内部与环境参数两部分; t为时间; Sk l r 为对该 agent此刻状态有直接影响的第 k个 agent的 第 lr个状态 ,它本身是 t的函数. 可见 ,整个 Multi2agents系统行为的复杂性就取 决于状态函数在时态相关性方面的交迭程度. 考虑 到实际情况下总有相互观察上的时延 ,对于图 5所 示的一个系统 ,假设每个 agent的状态函数集合只 由一个函数组成 ,则这个系统的状态描述可表示为 S1 ( t) = f1 (X, t) , S2 ( t) = f2 (X, S1 ( t - △t21 ) , S5 ( t - △t25 ) , t) , S3 ( t) = f3 (X, S4 ( t - △t34 ) , t) , S4 ( t) = f4 (X, S1 ( t - △t41 ) , t) , S5 ( t) = f5 (X, S3 ( t - △t53 ) , S4 ( t - △t54 ) , t). 其中 : X是由参数组成的向量 , △tij是 i和 j间的观 察延迟. 假设图 5中的 agent1 完成 f1 ( X, t) = 2x + 2 t, agent4 完成 f4 ( X, S1 ( t - △t41 ) , t) = x 2 + S1 ( t - 1) + t,那么它们的理想状态变化轨迹如图 6和图 7 所示. 图 5 5个 agent间的制约关系 Fig. 5 The constraint relationship s among five agents 图 6 agent1 的状态轨迹 Fig. 6 The status track of agent1 图 7 agent4 的状态轨迹 Fig. 7 The status track of agent4 理论上讲不能期望计算机中 CPU 的数量与 agen数t 量能够相等 ,因此往往通过用一个线程对应 一个 agent的软件模拟的方法来进行整个过程的仿 真. 这就导致临界区的出现 ,各 agent行为间的因果 联系会给临界区的访问控制带来很大的困难. 因为 所有 agent并非如真实物理系统那样并发执行 (且 无须同步控制量 ) ,而是被分配在不同的时间片内 执行 ,存在某些 agent提前 ,同时另一些 agent滞后 ·48· 智 能 系 统 学 报 第 4卷