正在加载图片...
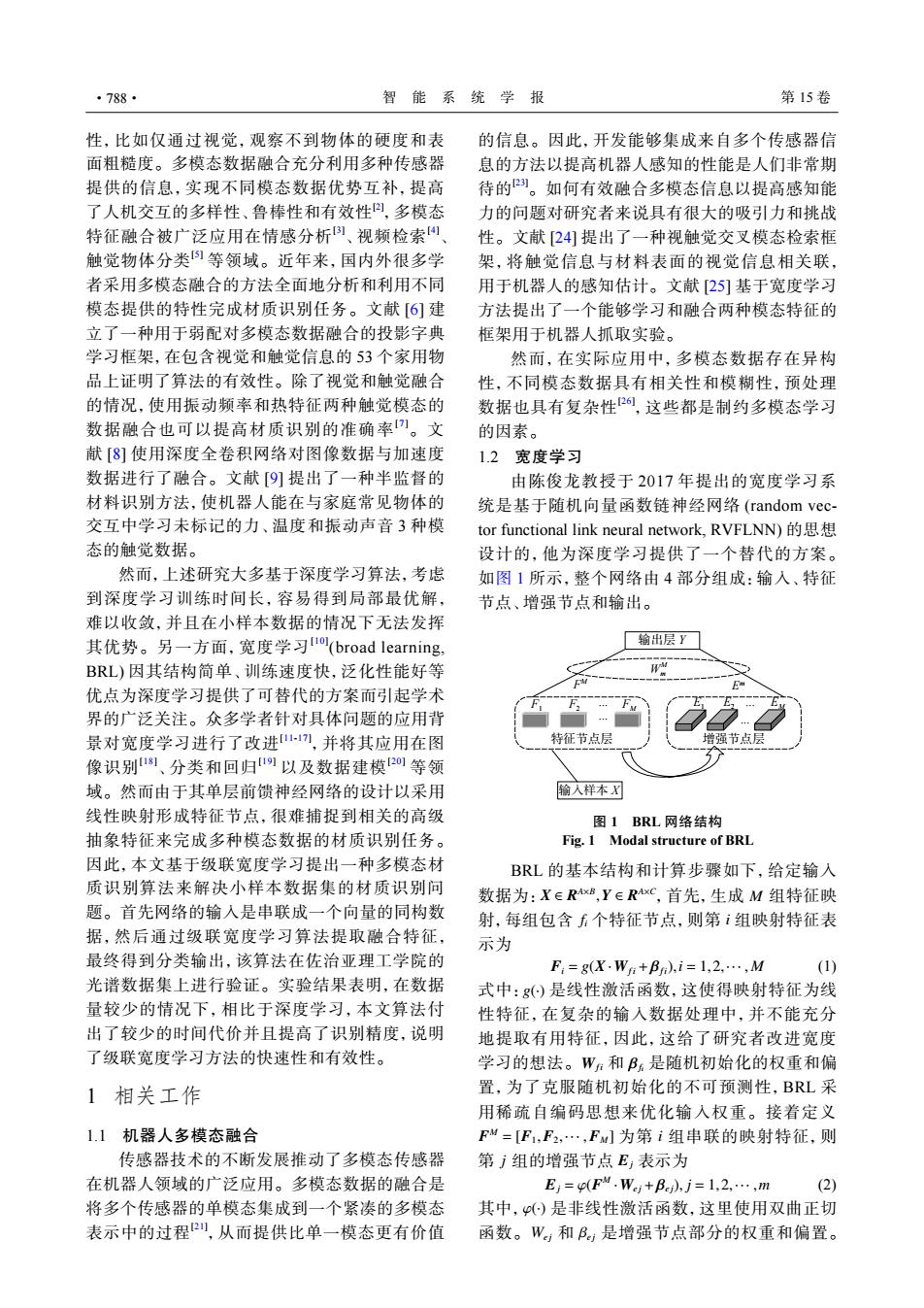
·788· 智能系统学报 第15卷 性,比如仅通过视觉,观察不到物体的硬度和表 的信息。因此,开发能够集成来自多个传感器信 面粗糙度。多模态数据融合充分利用多种传感器 息的方法以提高机器人感知的性能是人们非常期 提供的信息,实现不同模态数据优势互补,提高 待的。如何有效融合多模态信息以提高感知能 了人机交互的多样性、鲁棒性和有效性回,多模态 力的问题对研究者来说具有很大的吸引力和挑战 特征融合被广泛应用在情感分析)、视频检索 性。文献[24]提出了一种视触觉交叉模态检索框 触觉物体分类1等领域。近年来,国内外很多学 架,将触觉信息与材料表面的视觉信息相关联, 者采用多模态融合的方法全面地分析和利用不同 用于机器人的感知估计。文献[25]基于宽度学习 模态提供的特性完成材质识别任务。文献[6]建 方法提出了一个能够学习和融合两种模态特征的 立了一种用于弱配对多模态数据融合的投影字典 框架用于机器人抓取实验。 学习框架,在包含视觉和触觉信息的53个家用物 然而,在实际应用中,多模态数据存在异构 品上证明了算法的有效性。除了视觉和触觉融合 性,不同模态数据具有相关性和模糊性,预处理 的情况,使用振动频率和热特征两种触觉模态的 数据也具有复杂性2,这些都是制约多模态学习 数据融合也可以提高材质识别的准确率)。文 的因素。 献[8]使用深度全卷积网络对图像数据与加速度 1.2宽度学习 数据进行了融合。文献[9]提出了一种半监督的 由陈俊龙教授于2017年提出的宽度学习系 材料识别方法,使机器人能在与家庭常见物体的 统是基于随机向量函数链神经网络(random vec- 交互中学习未标记的力、温度和振动声音3种模 tor functional link neural network.RVFLNN)的思想 态的触觉数据。 设计的,他为深度学习提供了一个替代的方案。 然而,上述研究大多基于深度学习算法,考虑 如图1所示,整个网络由4部分组成:输入、特征 到深度学习训练时间长,容易得到局部最优解, 节点、增强节点和输出。 难以收敛,并且在小样本数据的情况下无法发挥 其优势。另一方面,宽度学习io(broad learning, 输出层Y BRL)因其结构简单、训练速度快,泛化性能好等 优点为深度学习提供了可替代的方案而引起学术 界的广泛关注。众多学者针对具体问题的应用背 景对宽度学习进行了改进1”,并将其应用在图 特征节点层 强节点层 像识别1、分类和回归1以及数据建模等领 域。然而由于其单层前馈神经网络的设计以采用 输入样本X 线性映射形成特征节点,很难捕捉到相关的高级 图1BRL网络结构 抽象特征来完成多种模态数据的材质识别任务。 Fig.1 Modal structure of BRL 因此,本文基于级联宽度学习提出一种多模态材 BRL的基本结构和计算步骤如下,给定输入 质识别算法来解决小样本数据集的材质识别问 数据为:X∈R,Y∈RxC,首先,生成M组特征映 题。首先网络的输入是串联成一个向量的同构数 射,每组包含个特征节点,则第i组映射特征表 据,然后通过级联宽度学习算法提取融合特征, 示为 最终得到分类输出,该算法在佐治亚理工学院的 F:=g(X.Wn+B),i=1,2,…,M (1) 光谱数据集上进行验证。实验结果表明,在数据 式中:g()是线性激活函数,这使得映射特征为线 量较少的情况下,相比于深度学习,本文算法付 性特征,在复杂的输入数据处理中,并不能充分 出了较少的时间代价并且提高了识别精度,说明 地提取有用特征,因此,这给了研究者改进宽度 了级联宽度学习方法的快速性和有效性。 学习的想法。W:和B,是随机初始化的权重和偏 1 相关工作 置,为了克服随机初始化的不可预测性,BRL采 用稀疏自编码思想来优化输入权重。接着定义 1.1机器人多模态融合 FM=[F,F2,…,Fw为第i组串联的映射特征,则 传感器技术的不断发展推动了多模态传感器 第j组的增强节点E,表示为 在机器人领域的广泛应用。多模态数据的融合是 E,=g(F.W+Bej=1,2,…,m (2) 将多个传感器的单模态集成到一个紧凑的多模态 其中,(是非线性激活函数,这里使用双曲正切 表示中的过程2,从而提供比单一模态更有价值 函数。W。和B。是增强节点部分的权重和偏置。性,比如仅通过视觉,观察不到物体的硬度和表 面粗糙度。多模态数据融合充分利用多种传感器 提供的信息,实现不同模态数据优势互补,提高 了人机交互的多样性、鲁棒性和有效性[2] ,多模态 特征融合被广泛应用在情感分析[3] 、视频检索[4] 、 触觉物体分类[5] 等领域。近年来,国内外很多学 者采用多模态融合的方法全面地分析和利用不同 模态提供的特性完成材质识别任务。文献 [6] 建 立了一种用于弱配对多模态数据融合的投影字典 学习框架,在包含视觉和触觉信息的 53 个家用物 品上证明了算法的有效性。除了视觉和触觉融合 的情况,使用振动频率和热特征两种触觉模态的 数据融合也可以提高材质识别的准确率[7]。文 献 [8] 使用深度全卷积网络对图像数据与加速度 数据进行了融合。文献 [9] 提出了一种半监督的 材料识别方法,使机器人能在与家庭常见物体的 交互中学习未标记的力、温度和振动声音 3 种模 态的触觉数据。 然而,上述研究大多基于深度学习算法,考虑 到深度学习训练时间长,容易得到局部最优解, 难以收敛,并且在小样本数据的情况下无法发挥 其优势。另一方面,宽度学习[10] (broad learning, BRL) 因其结构简单、训练速度快,泛化性能好等 优点为深度学习提供了可替代的方案而引起学术 界的广泛关注。众多学者针对具体问题的应用背 景对宽度学习进行了改进[11-17] ,并将其应用在图 像识别[18] 、分类和回归[19] 以及数据建模[20] 等领 域。然而由于其单层前馈神经网络的设计以采用 线性映射形成特征节点,很难捕捉到相关的高级 抽象特征来完成多种模态数据的材质识别任务。 因此,本文基于级联宽度学习提出一种多模态材 质识别算法来解决小样本数据集的材质识别问 题。首先网络的输入是串联成一个向量的同构数 据,然后通过级联宽度学习算法提取融合特征, 最终得到分类输出,该算法在佐治亚理工学院的 光谱数据集上进行验证。实验结果表明,在数据 量较少的情况下,相比于深度学习,本文算法付 出了较少的时间代价并且提高了识别精度,说明 了级联宽度学习方法的快速性和有效性。 1 相关工作 1.1 机器人多模态融合 传感器技术的不断发展推动了多模态传感器 在机器人领域的广泛应用。多模态数据的融合是 将多个传感器的单模态集成到一个紧凑的多模态 表示中的过程[21] ,从而提供比单一模态更有价值 的信息。因此,开发能够集成来自多个传感器信 息的方法以提高机器人感知的性能是人们非常期 待的[23]。如何有效融合多模态信息以提高感知能 力的问题对研究者来说具有很大的吸引力和挑战 性。文献 [24] 提出了一种视触觉交叉模态检索框 架,将触觉信息与材料表面的视觉信息相关联, 用于机器人的感知估计。文献 [25] 基于宽度学习 方法提出了一个能够学习和融合两种模态特征的 框架用于机器人抓取实验。 然而,在实际应用中,多模态数据存在异构 性,不同模态数据具有相关性和模糊性,预处理 数据也具有复杂性[26] ,这些都是制约多模态学习 的因素。 1.2 宽度学习 由陈俊龙教授于 2017 年提出的宽度学习系 统是基于随机向量函数链神经网络 (random vector functional link neural network, RVFLNN) 的思想 设计的,他为深度学习提供了一个替代的方案。 如图 1 所示,整个网络由 4 部分组成:输入、特征 节点、增强节点和输出。 输出层 Y ... ... ... ... 输入样本 X 特征节点层 增强节点层 M Wm E F M m F1 F2 FM E1 E2 EM 图 1 BRL 网络结构 Fig. 1 Modal structure of BRL X ∈ R A×B ,Y ∈ R A×C M fi i BRL 的基本结构和计算步骤如下,给定输入 数据为: ,首先,生成 组特征映 射,每组包含 个特征节点,则第 组映射特征表 示为 Fi = g(X·Wf i +βf i),i = 1,2,··· , M (1) g(·) Wf i βfi F M = [F1,F2,··· ,FM] i j Ej 式中: 是线性激活函数,这使得映射特征为线 性特征,在复杂的输入数据处理中,并不能充分 地提取有用特征,因此,这给了研究者改进宽度 学习的想法。 和 是随机初始化的权重和偏 置,为了克服随机初始化的不可预测性,BRL 采 用稀疏自编码思想来优化输入权重。接着定义 为第 组串联的映射特征,则 第 组的增强节点 表示为 Ej = φ(F M ·We j +βe j), j = 1,2,··· ,m (2) φ(·) We j βe j 其中, 是非线性激活函数,这里使用双曲正切 函数。 和 是增强节点部分的权重和偏置。 ·788· 智 能 系 统 学 报 第 15 卷