正在加载图片...
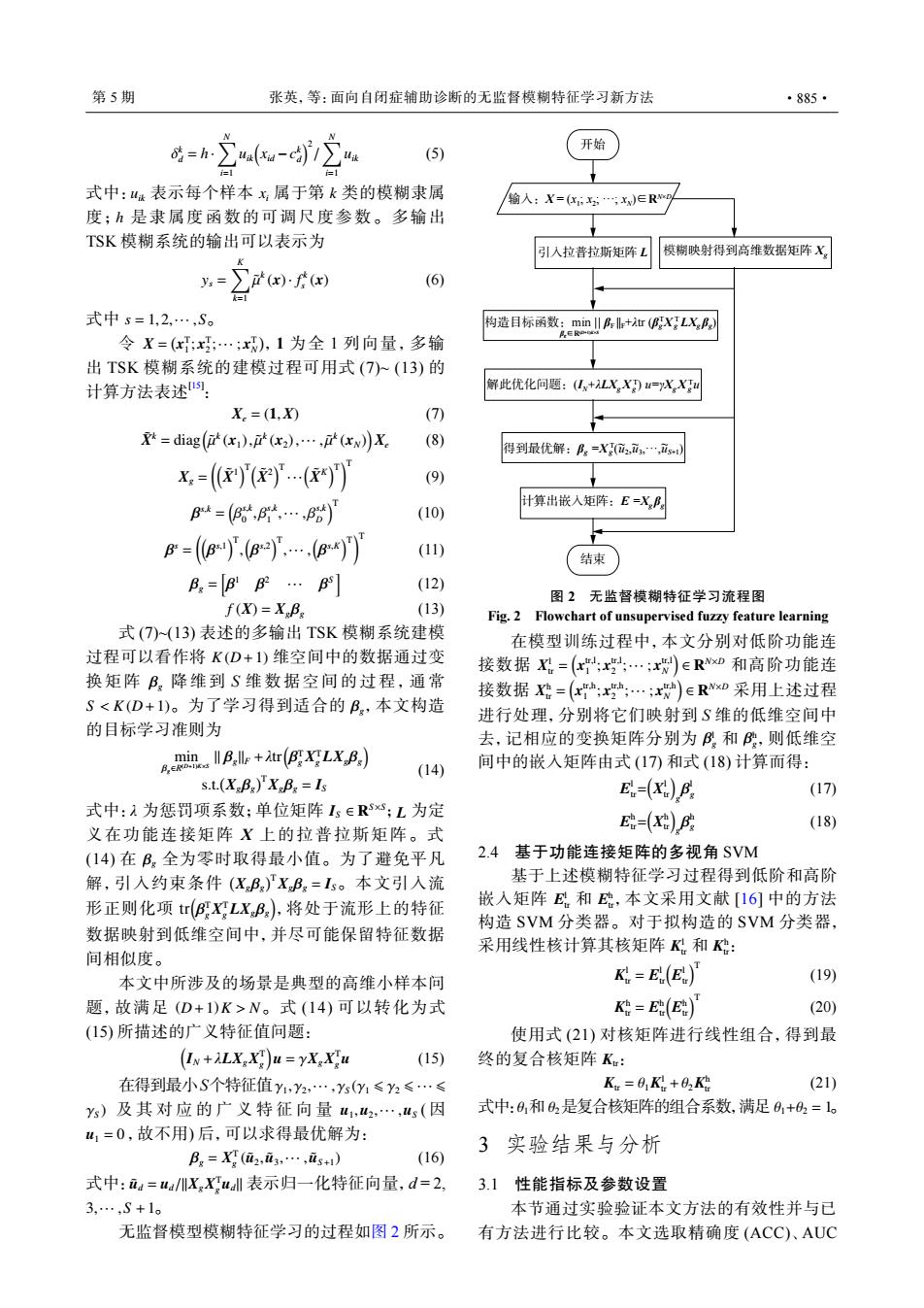
第5期 张英,等:面向自闭症辅助诊断的无监督模糊特征学习新方法 ·885· =h∑w-2 N 开始 (5) 式中:“:表示每个样本x属于第k类的模糊隶属 输人:X=(:X2;;x)∈R 度;h是隶属度函数的可调尺度参数。多输出 TSK模糊系统的输出可以表示为 引人拉普拉斯矩阵L 模糊映射得到高维数据矩阵X y3= i(x)f (x) (6) 式中s=1,2,…,S。 构造目标函数:minl川A=l+t(X:LXP,) 慧ERo 令X=(x:x:…;xW),1为全1列向量,多输 出TSK模糊系统的建模过程可用式(7)(13)的 计算方法表述: 解此优化问题:(仙x+LXX)u=XX4 X.=(1,X) (7) *=diag(t(x),t(x),…,t(rwX。 (8) 得到最优解:B。=Xg2,,…,as) x=(到)…(月) (9) B=映…P瑞) 计算出嵌入矩阵:E=XB。 (10) B=(82….0B-门 (11) 结束 B=BB…B] (12) 图2无监督模糊特征学习流程图 f(X)=X B: (13) Fig.2 Flowchart of unsupervised fuzzy feature learning 式(7)(13)表述的多输出TSK模糊系统建模 在模型训练过程中,本文分别对低阶功能连 过程可以看作将K(D+1)维空间中的数据通过变 接数据X=(x;x;…;))eRw和高阶功能连 换矩阵B。降维到S维数据空间的过程,通常 接数据X=(x;x;…;x)eR0采用上述过程 S<K(D+1)。为了学习得到适合的B,本文构造 进行处理,分别将它们映射到S维的低维空间中 的目标学习准则为 去,记相应的变换矩阵分别为和,则低维空 min Balle+r(BXLXB) (14) 间中的嵌入矩阵由式(17)和式(18)计算而得: s.t.(XBg)XBs=Is E=(XL)B. (17) 式中:1为惩罚项系数;单位矩阵I∈Rs;L为定 (18) 义在功能连接矩阵X上的拉普拉斯矩阵。式 路=(x) (14)在B。全为零时取得最小值。为了避免平凡 2.4 基于功能连接矩阵的多视角SVM 解,引入约束条件(XB)'XB=Is。本文引入流 基于上述模糊特征学习过程得到低阶和高阶 形正则化项tr(BIXLXB),将处于流形上的特征 嵌入矩阵E和,本文采用文献[16]中的方法 构造SVM分类器。对于拟构造的SVM分类器, 数据映射到低维空间中,并尽可能保留特征数据 采用线性核计算其核矩阵K和: 间相似度。 本文中所涉及的场景是典型的高维小样本问 K=E(E)月 (19) 题,故满足(D+1)K>N。式(14)可以转化为式 =E(E) (20) (15)所描述的广义特征值问题: 使用式(21)对核矩阵进行线性组合,得到最 (IN +LX X)u=YXX:u (15) 终的复合核矩阵K.: 在得到最小S个特征值y1,Y2,…,Ys(y1≤Y2≤…≤ K.=0K+02K (21) ys)及其对应的广义特征向量1,2,…,us(因 式中:0,和2是复合核矩阵的组合系数,满足0+02=1。 1=0,故不用)后,可以求得最优解为: 3实验结果与分析 Bg=Xg(a2,m3…,as+1) (16) 式中:u=u/川XXual表示归一化特征向量,d=2, 3.1性能指标及参数设置 3,…,S+1。 本节通过实验验证本文方法的有效性并与已 无监督模型模糊特征学习的过程如图2所示。 有方法进行比较。本文选取精确度(ACC)、AUCδ k d = h · ∑N i=1 uik( xid −c k d )2 / ∑N i=1 uik (5) uik xi k h 式中: 表示每个样本 属于第 类的模糊隶属 度 ; 是隶属度函数的可调尺度参数。多输出 TSK 模糊系统的输出可以表示为 ys = ∑K k=1 µ˜ k (x)· f k s (x) (6) 式中 s = 1,2,··· ,S。 X = ( x T 1 ; x T 2 ;··· ; x T N ) 令 ,1 为全 1 列向量,多输 出 TSK 模糊系统的建模过程可用式 (7)~ (13) 的 计算方法表述[15] : Xe = (1,X) (7) X˜ k = diag( µ˜ k (x1),µ˜ k (x2),··· ,µ˜ k (xN) ) Xe (8) Xg = (( X˜ 1 )T( X˜ 2 )T ···( X˜ K )T )T (9) β s,k = ( β s,k 0 , βs,k 1 ,··· , βs,k D )T (10) β s = (( β s,1 )T , ( β s,2 )T ,··· , ( β s,K )T )T (11) βg = [ β 1 β 2 ··· β S ] (12) f (X) = Xgβg (13) K(D+1) βg S < K(D+1) βg 式 (7)~(13) 表述的多输出 TSK 模糊系统建模 过程可以看作将 维空间中的数据通过变 换矩阵 降 维 到 S 维数据空间的过程,通常 。为了学习得到适合的 ,本文构造 的目标学习准则为 min βg∈R(D+1)K×S ∥ βg∥F +λtr( β T gX T g LXgβg ) s.t. ( Xgβg )T Xgβg = IS (14) λ IS ∈ R S×S L βg ( Xgβg )T Xgβg = IS ( β T gX T g LXgβg ) 式中: 为惩罚项系数;单位矩阵 ; 为定 义在功能连接矩阵 X 上的拉普拉斯矩阵。式 (14) 在 全为零时取得最小值。为了避免平凡 解,引入约束条件 。本文引入流 形正则化项 tr ,将处于流形上的特征 数据映射到低维空间中,并尽可能保留特征数据 间相似度。 (D+1)K > N 本文中所涉及的场景是典型的高维小样本问 题,故满足 。式 (14) 可以转化为式 (15) 所描述的广义特征值问题: ( IN +λLXgX T g ) u = γXgX T g u (15) γ1, γ2,··· , γS (γ1 ⩽ γ2 ⩽ ··· ⩽ γS ) u1,u2,··· ,uS u1 = 0 在得到最小S个特征值 及其对应的广义特征向量 ( 因 ,故不用) 后,可以求得最优解为: βg = X T g (u˜ 2,u˜ 3,··· ,u˜ S+1) (16) u˜ d = ud/||XgX T g ud|| 3,··· ,S +1 式中: 表示归一化特征向量,d = 2, 。 无监督模型模糊特征学习的过程如图 2 所示。 βg∈R(D+1)K×S 构造目标函数:min || βF ||F+λtr (βg TXg T LXg βg ) 解此优化问题:(IN+λLXg Xg T ) u=γXg Xg Tu 开始 结束 引入拉普拉斯矩阵 L 模糊映射得到高维数据矩阵 Xg 计算出嵌入矩阵:E =Xg βg 得到最优解:βg =Xg T ( ~ 2 ,u ~ 3 ,···,u ~ S+1) 输入:X = (x1 ; x2 ; ···; xN )∈RN×D u 图 2 无监督模糊特征学习流程图 Fig. 2 Flowchart of unsupervised fuzzy feature learning X l tr = ( x tr,l 1 ; x tr,l 2 ;··· ; x tr,l N ) ∈ R N×D X h tr = ( x tr,h 1 ; x tr,h 2 ;··· ; x tr,h N ) ∈ R N×D β l g β h g 在模型训练过程中,本文分别对低阶功能连 接数据 和高阶功能连 接数据 采用上述过程 进行处理,分别将它们映射到 S 维的低维空间中 去,记相应的变换矩阵分别为 和 ,则低维空 间中的嵌入矩阵由式 (17) 和式 (18) 计算而得: E l tr= ( X l tr) g β l g (17) E h tr= ( X h tr) g β h g (18) 2.4 基于功能连接矩阵的多视角 SVM E l tr E h tr K l tr K h tr 基于上述模糊特征学习过程得到低阶和高阶 嵌入矩阵 和 ,本文采用文献 [16] 中的方法 构造 SVM 分类器。对于拟构造的 SVM 分类器, 采用线性核计算其核矩阵 和 : K l tr = E l tr( E l tr)T (19) K h tr = E h tr( E h tr)T (20) Ktr 使用式 (21) 对核矩阵进行线性组合,得到最 终的复合核矩阵 : Ktr = θ1K l tr +θ2K h tr (21) 式中: θ1和 θ2是复合核矩阵的组合系数,满足 θ1+θ2 = 1。 3 实验结果与分析 3.1 性能指标及参数设置 本节通过实验验证本文方法的有效性并与已 有方法进行比较。本文选取精确度 (ACC)、AUC 第 5 期 张英,等:面向自闭症辅助诊断的无监督模糊特征学习新方法 ·885·