正在加载图片...
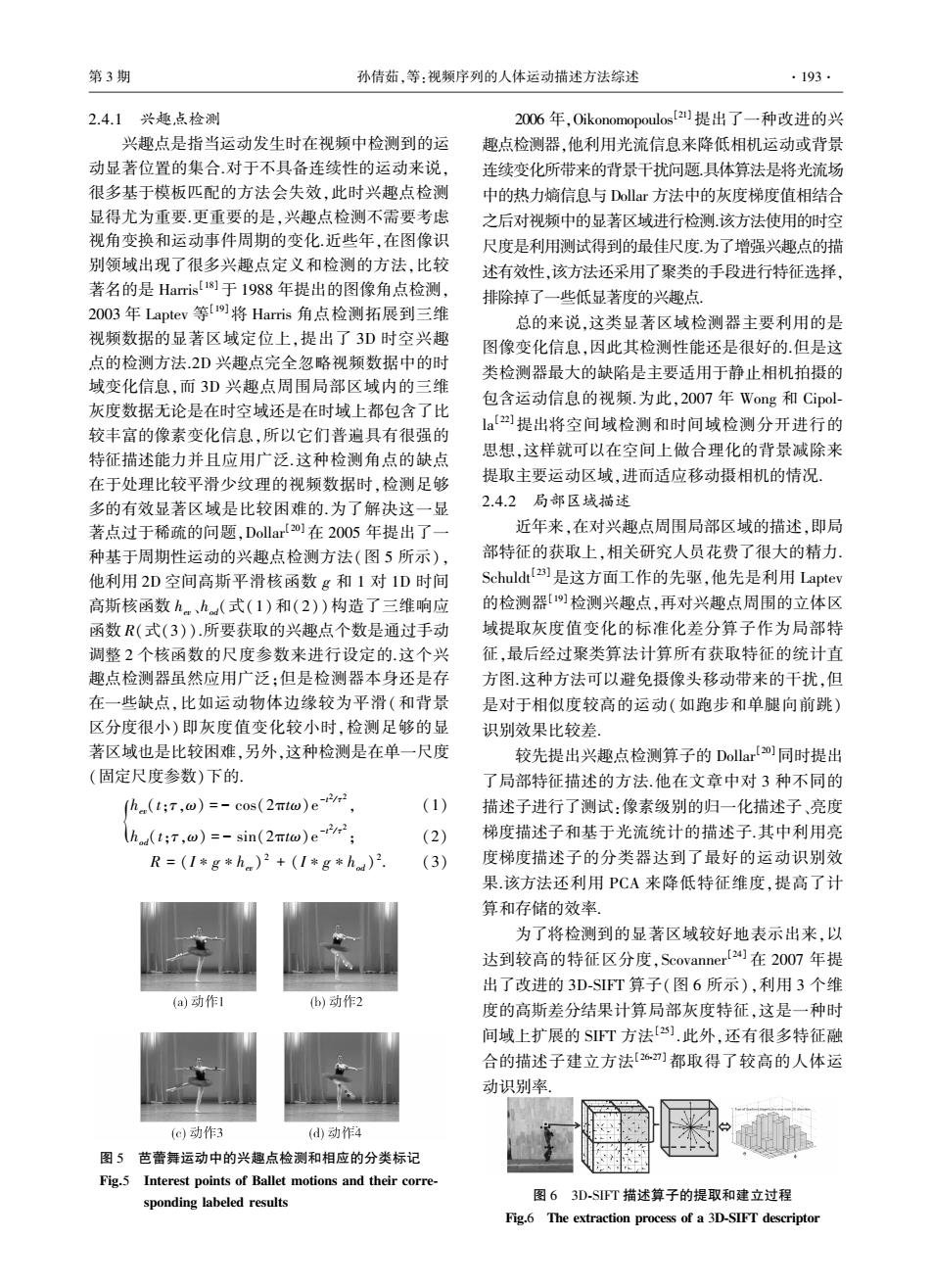
第3期 孙倩茹,等:视频序列的人体运动描述方法综述 ·193· 2.4.1兴趣,点检测 2006年,0 ikonomopoulos2提出了一种改进的兴 兴趣点是指当运动发生时在视频中检测到的运 趣点检测器,他利用光流信息来降低相机运动或背景 动显著位置的集合.对于不具备连续性的运动来说, 连续变化所带来的背景干扰问题具体算法是将光流场 很多基于模板匹配的方法会失效,此时兴趣点检测 中的热力熵信息与Dollar方法中的灰度梯度值相结合 显得尤为重要.更重要的是,兴趣点检测不需要考虑 之后对视频中的显著区域进行检测该方法使用的时空 视角变换和运动事件周期的变化近些年,在图像识 尺度是利用测试得到的最佳尺度.为了增强兴趣点的描 别领域出现了很多兴趣点定义和检测的方法,比较 述有效性,该方法还采用了聚类的手段进行特征选择, 著名的是Hais1)]于1988年提出的图像角点检测, 排除掉了一些低显著度的兴趣点」 2003年Laptev等19]将Harris角点检测拓展到三维 总的来说,这类显著区域检测器主要利用的是 视频数据的显著区域定位上,提出了3D时空兴趣 图像变化信息,因此其检测性能还是很好的但是这 点的检测方法.2D兴趣点完全忽略视频数据中的时 类检测器最大的缺陷是主要适用于静止相机拍摄的 域变化信息,而3D兴趣点周围局部区域内的三维 包含运动信息的视频.为此,2007年Wong和Cipol- 灰度数据无论是在时空域还是在时域上都包含了比 较丰富的像素变化信息,所以它们普遍具有很强的 la[提出将空间域检测和时间域检测分开进行的 特征描述能力并且应用广泛这种检测角点的缺点 思想,这样就可以在空间上做合理化的背景减除来 在于处理比较平滑少纹理的视频数据时,检测足够 提取主要运动区域,进而适应移动摄相机的情况, 多的有效显著区域是比较困难的.为了解决这一显 2.4.2局部区域描述 著点过于稀疏的问题,Dollar2o在2005年提出了一 近年来,在对兴趣点周围局部区域的描述,即局 种基于周期性运动的兴趣点检测方法(图5所示), 部特征的获取上,相关研究人员花费了很大的精力 他利用2D空间高斯平滑核函数g和1对1D时间 Schuldt!2)是这方面工作的先驱,他先是利用Laptev 高斯核函数h、h(式(1)和(2))构造了三维响应 的检测器19]检测兴趣点,再对兴趣点周围的立体区 函数R(式(3).所要获取的兴趣点个数是通过手动 域提取灰度值变化的标准化差分算子作为局部特 调整2个核函数的尺度参数来进行设定的.这个兴 征,最后经过聚类算法计算所有获取特征的统计直 趣点检测器虽然应用广泛:但是检测器本身还是存 方图这种方法可以避免摄像头移动带来的干扰,但 在一些缺点,比如运动物体边缘较为平滑(和背景 是对于相似度较高的运动(如跑步和单腿向前跳) 区分度很小)即灰度值变化较小时,检测足够的显 识别效果比较差. 著区域也是比较困难,另外,这种检测是在单一尺度 较先提出兴趣点检测算子的Dollar2o]同时提出 (固定尺度参数)下的 了局部特征描述的方法.他在文章中对3种不同的 [h (t:T,)=-cos(2m)e (1) 描述子进行了测试:像素级别的归一化描述子、亮度 (ht:,)=-sin(2m)e (2) 梯度描述子和基于光流统计的描述子.其中利用亮 R=(I*g*hn)2+(I*g*h)2. (3) 度梯度描述子的分类器达到了最好的运动识别效 果.该方法还利用PCA来降低特征维度,提高了计 算和存储的效率。 为了将检测到的显著区域较好地表示出来,以 达到较高的特征区分度,Scovanner24]在2007年提 出了改进的3D-SFT算子(图6所示),利用3个维 (a)动作l b)动作2 度的高斯差分结果计算局部灰度特征,这是一种时 间域上扩展的ST方法[2].此外,还有很多特征融 合的描述子建立方法[26]都取得了较高的人体运 动识别率 (c)动作3 (d)动作4 图5 芭蕾舞运动中的兴趣点检测和相应的分类标记 Fig.5 Interest points of Ballet motions and their corre- sponding labeled results 图63D-SFT描述算子的提取和建立过程 Fig.6 The extraction process of a 3D-SIFT descriptor2.4.1 兴趣点检测 兴趣点是指当运动发生时在视频中检测到的运 动显著位置的集合.对于不具备连续性的运动来说, 很多基于模板匹配的方法会失效,此时兴趣点检测 显得尤为重要.更重要的是,兴趣点检测不需要考虑 视角变换和运动事件周期的变化.近些年,在图像识 别领域出现了很多兴趣点定义和检测的方法,比较 著名的是 Harris [18]于 1988 年提出的图像角点检测, 2003 年 Laptev 等[19]将 Harris 角点检测拓展到三维 视频数据的显著区域定位上,提出了 3D 时空兴趣 点的检测方法.2D 兴趣点完全忽略视频数据中的时 域变化信息,而 3D 兴趣点周围局部区域内的三维 灰度数据无论是在时空域还是在时域上都包含了比 较丰富的像素变化信息,所以它们普遍具有很强的 特征描述能力并且应用广泛.这种检测角点的缺点 在于处理比较平滑少纹理的视频数据时,检测足够 多的有效显著区域是比较困难的.为了解决这一显 著点过于稀疏的问题,Dollar [20] 在 2005 年提出了一 种基于周期性运动的兴趣点检测方法(图 5 所示), 他利用 2D 空间高斯平滑核函数 g 和 1 对 1D 时间 高斯核函数 hev、hod(式(1)和(2))构造了三维响应 函数 R(式(3)).所要获取的兴趣点个数是通过手动 调整 2 个核函数的尺度参数来进行设定的.这个兴 趣点检测器虽然应用广泛;但是检测器本身还是存 在一些缺点,比如运动物体边缘较为平滑(和背景 区分度很小) 即灰度值变化较小时,检测足够的显 著区域也是比较困难,另外,这种检测是在单一尺度 (固定尺度参数)下的. hev(t;τ,ω) = - cos(2πtω)e -t 2 / τ 2 , (1) hod(t;τ,ω) = - sin(2πtω)e -t 2 / τ 2 ; (2) { R = (I∗g∗hev) 2 + (I∗g∗hod ) 2 . (3) 图 5 芭蕾舞运动中的兴趣点检测和相应的分类标记 Fig.5 Interest points of Ballet motions and their corre⁃ sponding labeled results 2006 年,Oikonomopoulos [21] 提出了一种改进的兴 趣点检测器,他利用光流信息来降低相机运动或背景 连续变化所带来的背景干扰问题.具体算法是将光流场 中的热力熵信息与 Dollar 方法中的灰度梯度值相结合 之后对视频中的显著区域进行检测.该方法使用的时空 尺度是利用测试得到的最佳尺度.为了增强兴趣点的描 述有效性,该方法还采用了聚类的手段进行特征选择, 排除掉了一些低显著度的兴趣点. 总的来说,这类显著区域检测器主要利用的是 图像变化信息,因此其检测性能还是很好的.但是这 类检测器最大的缺陷是主要适用于静止相机拍摄的 包含运动信息的视频.为此,2007 年 Wong 和 Cipol⁃ la [22]提出将空间域检测和时间域检测分开进行的 思想,这样就可以在空间上做合理化的背景减除来 提取主要运动区域,进而适应移动摄相机的情况. 2.4.2 局部区域描述 近年来,在对兴趣点周围局部区域的描述,即局 部特征的获取上,相关研究人员花费了很大的精力. Schuldt [23]是这方面工作的先驱,他先是利用 Laptev 的检测器[19]检测兴趣点,再对兴趣点周围的立体区 域提取灰度值变化的标准化差分算子作为局部特 征,最后经过聚类算法计算所有获取特征的统计直 方图.这种方法可以避免摄像头移动带来的干扰,但 是对于相似度较高的运动(如跑步和单腿向前跳) 识别效果比较差. 较先提出兴趣点检测算子的 Dollar [20]同时提出 了局部特征描述的方法.他在文章中对 3 种不同的 描述子进行了测试:像素级别的归一化描述子、亮度 梯度描述子和基于光流统计的描述子.其中利用亮 度梯度描述子的分类器达到了最好的运动识别效 果.该方法还利用 PCA 来降低特征维度,提高了计 算和存储的效率. 为了将检测到的显著区域较好地表示出来,以 达到较高的特征区分度,Scovanner [24] 在 2007 年提 出了改进的 3D⁃SIFT 算子(图 6 所示),利用 3 个维 度的高斯差分结果计算局部灰度特征,这是一种时 间域上扩展的 SIFT 方法[25] .此外,还有很多特征融 合的描述子建立方法[26⁃27] 都取得了较高的人体运 动识别率. 图 6 3D⁃SIFT 描述算子的提取和建立过程 Fig.6 The extraction process of a 3D⁃SIFT descriptor 第 3 期 孙倩茹,等:视频序列的人体运动描述方法综述 ·193·