点击下载:西安电子科技大学:《神经网络与模糊系统 Neural Networks and Fuzzy Systems》课程PPT课件讲稿(2004)Chapter 09-2 模糊倒车控制系统——拖斗拖车
正在加载图片...
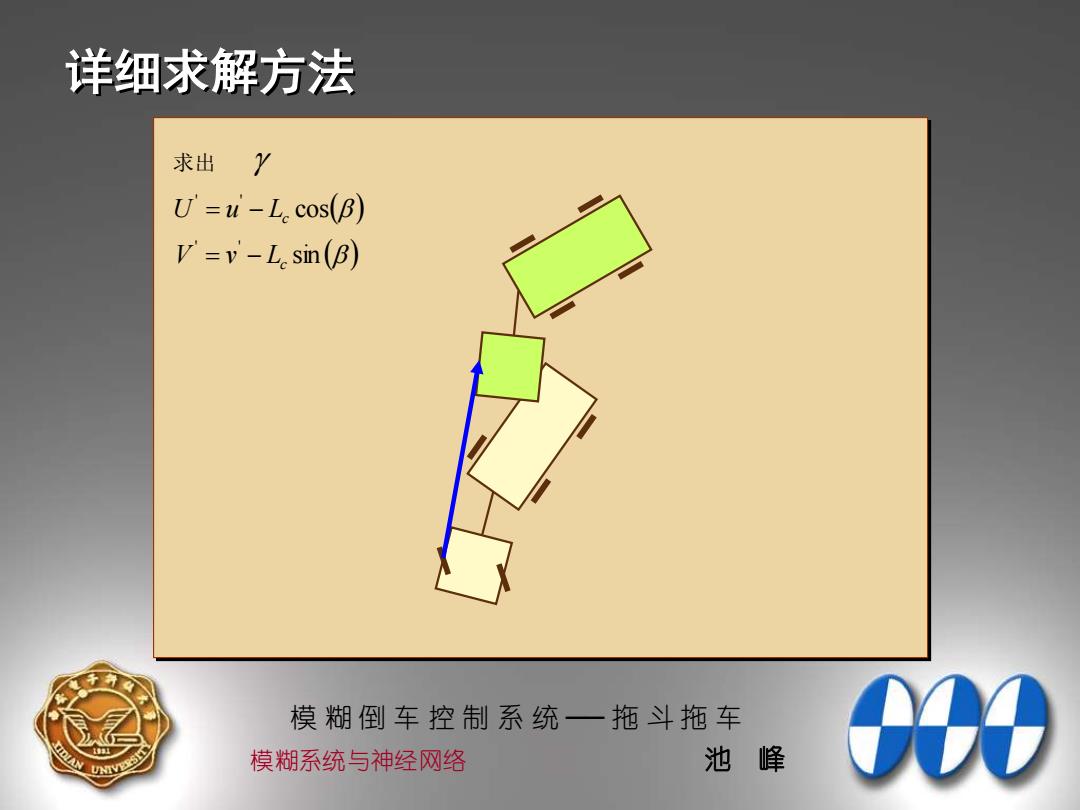
详细求解方法 求出 Y U'=u-L.cos(B) V=v-L.sin(B) 模糊倒车控制系统一拖斗拖车 模糊系统与神经网络 池峰 00模 糊 倒 车 控 制 系 统 ── 拖 斗 拖 车 模糊系统与神经网络 池 峰 详细求解方法 cos( ) ' ' Lc U = u − sin ( ) ' ' Lc V = v − 求出
<<向上翻页
向下翻页>>
点击下载:西安电子科技大学:《神经网络与模糊系统 Neural Networks and Fuzzy Systems》课程PPT课件讲稿(2004)Chapter 09-2 模糊倒车控制系统——拖斗拖车
©2008-现在 cucdc.com 高等教育资讯网 版权所有