正在加载图片...
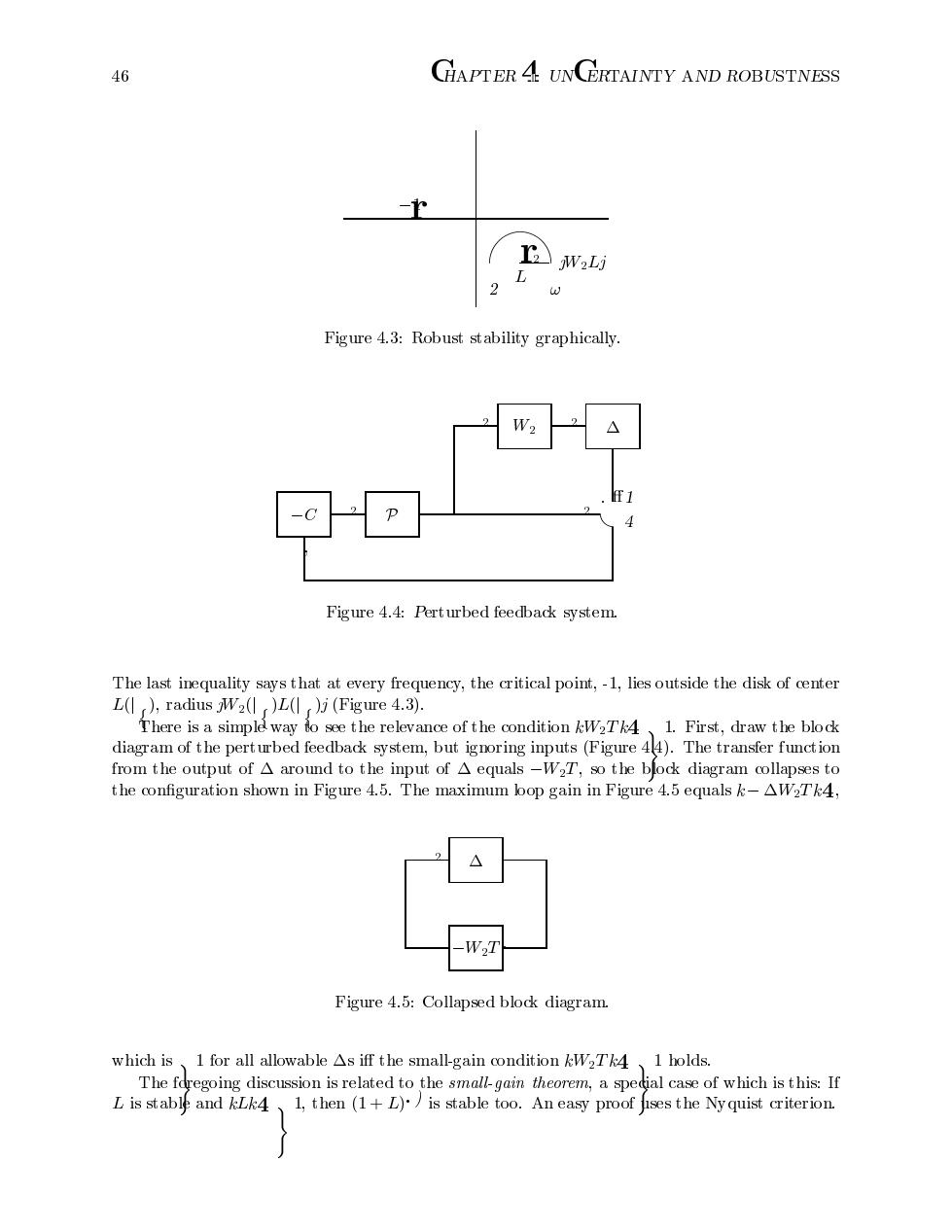
46 CHAPTER 4.UN ERTAINTY AND ROBUSTNESS r W2Lj 2 Figure 4.3:Robust stability graphically. W2 Figure 4.4:Perturbed feedback system The last inequality says that at every frequency,the critical point,-1,lies outside the disk of center L(),radius 2()L()j (Figure 4.3). There is a simple way io see the relevance of the condition kW2Tk4 1.First,draw the blodk diagram of the perturbed feedback system,but ignoring inputs(Figure 44).The transfer function from the output of A around to the input of A equals-W2T,so the block diagram collapses to the configuration shown in Figure 4.5.The maximum bop gain in Figure 4.5 equals k-AW2Tk4, W2T Figure 4.5:Collapsed block diagram. which is 1 for all allowable As iff the small-gain condition kW2Tk4 1 holds. The fdregoing discussion is related to the small-gain theorem,a special case of which is this:If L is stable and kLk4 1,then (1+L)/is stable too.An easy proof jises the Ny quist criterion.
CHAPTER UNCERTAINTY AND ROBUSTNESS r r jWLj L Figure Robust stability graphically C P W Figure Perturbed feedback system The last inequality says that at every frequency the critical point lies outside the disk of center Lj radius jWjLjj Figure There is a simple way to see the relevance of the condition kWT k First draw the block diagram of the perturbed feedback system but ignoring inputs Figure The transfer function from the output of around to the input of equals WT so the block diagram collapses to the conguration shown in Figure The maximum loop gain in Figure equals k WT k WT Figure Collapsed block diagram which is for all allowable s i the smallgain condition kWT k holds The foregoing discussion is related to the smal lgain theorem a special case of which is this If L is stable and kLk then L is stable too An easy proof uses the Nyquist criterion�������������������������������