正在加载图片...
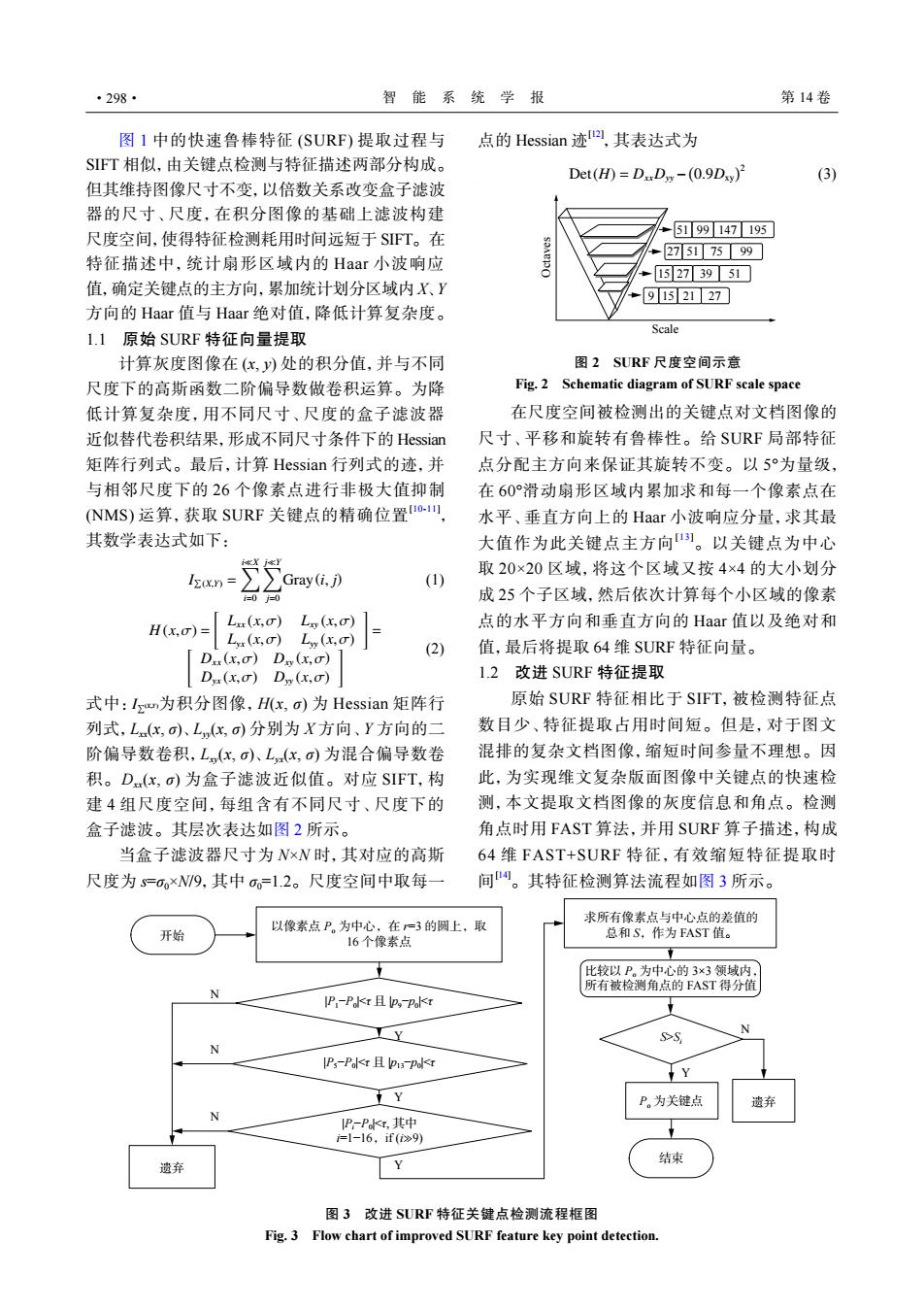
·298· 智能系统学报 第14卷 图1中的快速鲁棒特征(SURF)提取过程与 点的Hessian迹回,其表达式为 SFT相似,由关键点检测与特征描述两部分构成。 Det(H=DxDn-(0.9Dy)月 (3) 但其维持图像尺寸不变,以倍数关系改变盒子滤波 器的尺寸、尺度,在积分图像的基础上滤波构建 尺度空间,使得特征检测耗用时间远短于SFT。在 5199147195 27517599] 特征描述中,统计扇形区域内的Haar小波响应 5273951☐ 值,确定关键点的主方向,累加统计划分区域内XY 9152127 方向的Haar值与Haar绝对值,降低计算复杂度。 Scale 1.1原始SURF特征向量提取 计算灰度图像在(x,y)处的积分值,并与不同 图2SURF尺度空间示意 尺度下的高斯函数二阶偏导数做卷积运算。为降 Fig.2 Schematic diagram of SURF scale space 低计算复杂度,用不同尺寸、尺度的盒子滤波器 在尺度空间被检测出的关键点对文档图像的 近似替代卷积结果,形成不同尺寸条件下的Hessian 尺寸、平移和旋转有鲁棒性。给SURF局部特征 矩阵行列式。最后,计算Hessian行列式的迹,并 点分配主方向来保证其旋转不变。以5°为量级, 与相邻尺度下的26个像素点进行非极大值抑制 在60°滑动扇形区域内累加求和每一个像素点在 NMS)运算,获取SURF关键点的精确位置Io-, 水平、垂直方向上的Haar小波响应分量,求其最 其数学表达式如下: 大值作为此关键点主方向。以关键点为中心 iX jY 〉Gray(i,ji) 取20×20区域,将这个区域又按4×4的大小划分 (1) 00 成25个子区域,然后依次计算每个小区域的像素 H(x,σ)= Lu(x,) Lg(x,σ) 点的水平方向和垂直方向的Haar值以及绝对和 L(x,σ)Lm(x,o) (2) 值,最后将提取64维SURF特征向量。 D(x,)D(x.) D(x,)Dv(x,) 1.2改进SURF特征提取 式中:Isn为积分图像,Hx,o)为Hessian矩阵行 原始SURF特征相比于SIFT,被检测特征点 列式,L(x,o)、L,x,o)分别为X方向、Y方向的二 数目少、特征提取占用时间短。但是,对于图文 阶偏导数卷积,L,(x,σ)、L(x,σ)为混合偏导数卷 混排的复杂文档图像,缩短时间参量不理想。因 积。D(x,σ)为盒子滤波近似值。对应SIFT,构 此,为实现维文复杂版面图像中关键点的快速检 建4组尺度空间,每组含有不同尺寸、尺度下的 测,本文提取文档图像的灰度信息和角点。检测 盒子滤波。其层次表达如图2所示。 角点时用FAST算法,并用SURF算子描述,构成 当盒子滤波器尺寸为W×N时,其对应的高斯 64维FAST+SURF特征,有效缩短特征提取时 尺度为s=0×N/9,其中o=1.2。尺度空间中取每 间。其特征检测算法流程如图3所示。 求所有像素点与中心点的差值的 以像素点P。为中心,在=3的圆上,取 开始 总和S,作为FAST值。 16个像素点 比较以P。为中心的3×3领域内。 所有被检测角点的FAST得分值 P-PKr且p,PKa y S-S N Pg-Pat且pplt Y Y P。为关键点 遗弃 P-PK红,其中 =1-16,if(i》9) 结束 遗弃 Y 图3改进SURF特征关键点检测流程框图 Fig.3 Flow chart of improved SURF feature key point detection.图 1 中的快速鲁棒特征 (SURF) 提取过程与 SIFT 相似,由关键点检测与特征描述两部分构成。 但其维持图像尺寸不变,以倍数关系改变盒子滤波 器的尺寸、尺度,在积分图像的基础上滤波构建 尺度空间,使得特征检测耗用时间远短于 SIFT。在 特征描述中,统计扇形区域内的 Haar 小波响应 值,确定关键点的主方向,累加统计划分区域内 X、Y 方向的 Haar 值与 Haar 绝对值,降低计算复杂度。 1.1 原始 SURF 特征向量提取 计算灰度图像在 (x, y) 处的积分值,并与不同 尺度下的高斯函数二阶偏导数做卷积运算。为降 低计算复杂度,用不同尺寸、尺度的盒子滤波器 近似替代卷积结果,形成不同尺寸条件下的 Hessian 矩阵行列式。最后,计算 Hessian 行列式的迹,并 与相邻尺度下的 26 个像素点进行非极大值抑制 (NMS) 运算,获取 SURF 关键点的精确位置[10-11] , 其数学表达式如下: I ∑ (X,Y) = ∑i≪X i=0 ∑ j≪Y j=0 Gray(i, j) (1) H (x,σ) = [ Lxx (x,σ) Lxy (x,σ) Lyx (x,σ) Lyy (x,σ) ] = [ Dxx (x,σ) Dxy (x,σ) Dyx (x,σ) Dyy (x,σ) ] (2) 式中: I∑(X,Y)为积分图像,H(x, σ) 为 Hessian 矩阵行 列式,Lxx(x, σ)、Lyy(x, σ) 分别为 X 方向、Y 方向的二 阶偏导数卷积,Lxy(x, σ)、Lyx(x, σ) 为混合偏导数卷 积。Dxx(x, σ) 为盒子滤波近似值。对应 SIFT,构 建 4 组尺度空间,每组含有不同尺寸、尺度下的 盒子滤波。其层次表达如图 2 所示。 当盒子滤波器尺寸为 N×N 时,其对应的高斯 尺度为 s=σ0×N/9,其中 σ0=1.2。尺度空间中取每一 点的 Hessian 迹 [12] ,其表达式为 Det(H) = DxxDyy − ( 0.9Dxy)2 (3) 在尺度空间被检测出的关键点对文档图像的 尺寸、平移和旋转有鲁棒性。给 SURF 局部特征 点分配主方向来保证其旋转不变。以 5°为量级, 在 60°滑动扇形区域内累加求和每一个像素点在 水平、垂直方向上的 Haar 小波响应分量,求其最 大值作为此关键点主方向[13]。以关键点为中心 取 20×20 区域,将这个区域又按 4×4 的大小划分 成 25 个子区域,然后依次计算每个小区域的像素 点的水平方向和垂直方向的 Haar 值以及绝对和 值,最后将提取 64 维 SURF 特征向量。 1.2 改进 SURF 特征提取 原始 SURF 特征相比于 SIFT,被检测特征点 数目少、特征提取占用时间短。但是,对于图文 混排的复杂文档图像,缩短时间参量不理想。因 此,为实现维文复杂版面图像中关键点的快速检 测,本文提取文档图像的灰度信息和角点。检测 角点时用 FAST 算法,并用 SURF 算子描述,构成 64 维 FAST+SURF 特征,有效缩短特征提取时 间 [14]。其特征检测算法流程如图 3 所示。 Octaves Scale 51 99 147 195 27 51 75 99 15 15 27 9 21 27 39 51 图 2 SURF 尺度空间示意 Fig. 2 Schematic diagram of SURF scale space 开始 结束 以像素点 Po 为中心,在 r=3 的圆上,取 16 个像素点 遗弃 Po 为关键点 |P1−P0 |<τ 且 |p9−p0 |<τ S>Si 比较以 Po 为中心的 3×3 领域内, 所有被检测角点的 FAST 得分值 |P5−P0 |<τ 且 |p13−p0 |<τ |Pi−P0 |<τ, 其中 i=1−16,if (i>>9) 遗弃 求所有像素点与中心点的差值的 总和 S,作为 FAST 值。 N Y Y Y N N N Y 图 3 改进 SURF 特征关键点检测流程框图 Fig. 3 Flow chart of improved SURF feature key point detection. ·298· 智 能 系 统 学 报 第 14 卷