正在加载图片...
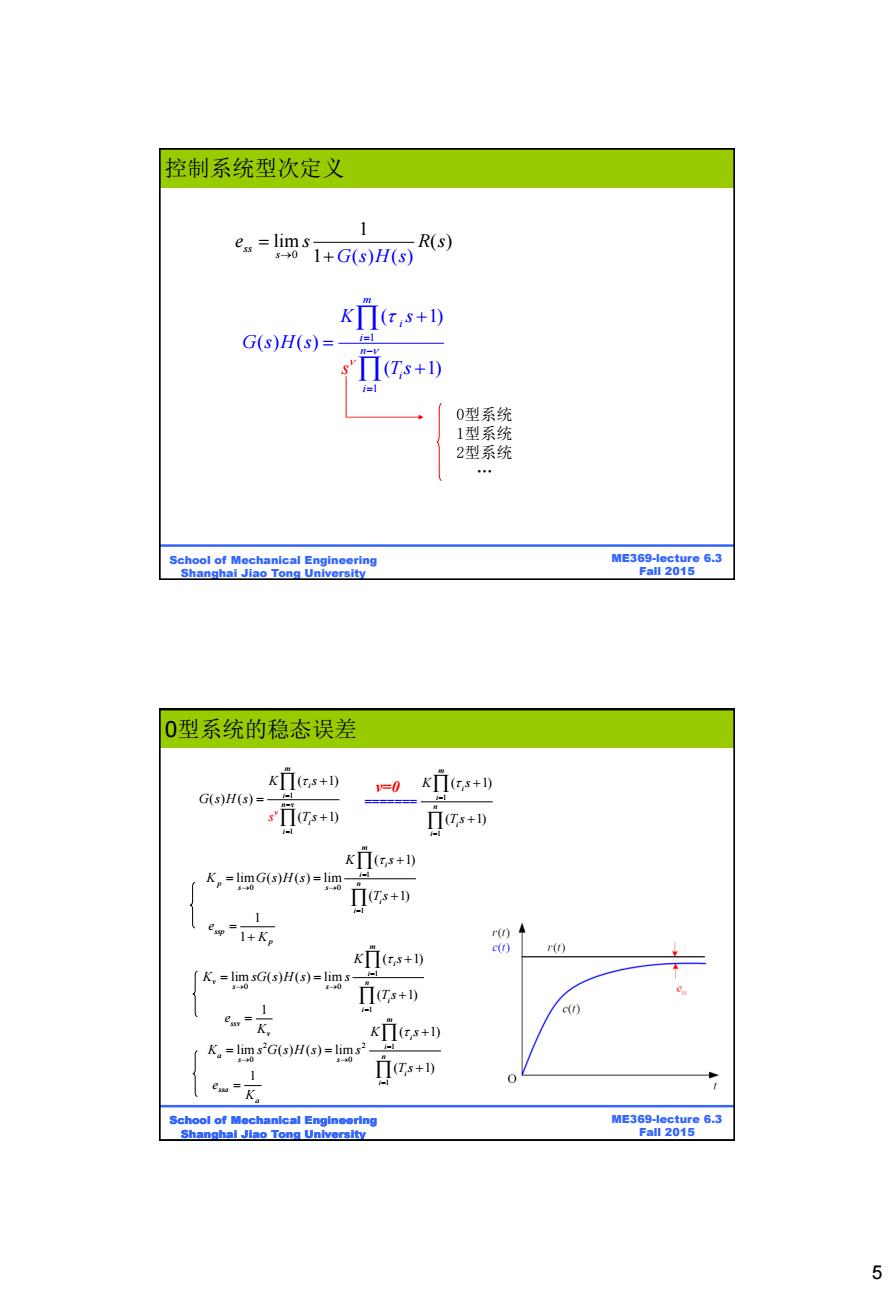
控制系统型次定义 ess lims- R(s) s-0 1+G(s)H(s) KII,3+D G(s)H(s)= sΠ+) i-l 0型系统 1型系统 2型系统 School of Mechanical Engineering ME369-lecture 6.3 Shanghai Jiao Tong University Fall 2015 0型系统的稳态误差 KIIGs+D 1=0 KIIGs+D) G(s)H(s)= Gs+D s+) Ki,s+l) K-limG(s)H(s)-lim s+D 1 ep1+Kp r04 IIG8+D dr) r(n K,limsG(s)H(s)=lims- s+) 1 d(t) IIGs+D K,=lmG(sH(=lim产 0G+ K School of Mechanical Engineering ME369-lecture 6.3 Shanghal Jiao Tong University Fall 2015 55 ME369-lecture 6.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 1 ( 1) ( ) ( ) ( 1) m i i n i i K s G s s s H T s 0 1 lim ( ) 1 ( ) ( ) ss s G s s H e s R s 0型系统 1型系统 2型系统 … 控制系统型次定义 ME369-lecture 6.3 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 1 1 ( 1) ( 1) m i i n i i K s T s 1 0 0 1 ( 1) lim ( ) ( ) lim ( 1) m i i p n s s i i K s K G s H s T s 1 1 ssp p e K 1 0 0 1 ( 1) lim ( ) ( ) lim ( 1) m i i v n s s i i K s K sG s H s s T s 1 ssv v e K 2 2 1 0 0 1 ( 1) lim ( ) ( ) lim ( 1) m i i a n s s i i K s K s G s H s s T s 1 ssa a e K 1 1 ( 1) ( ) ( ) ( 1) m i i v i v n i K s G s s H s T s v=0 0型系统的稳态误差