正在加载图片...
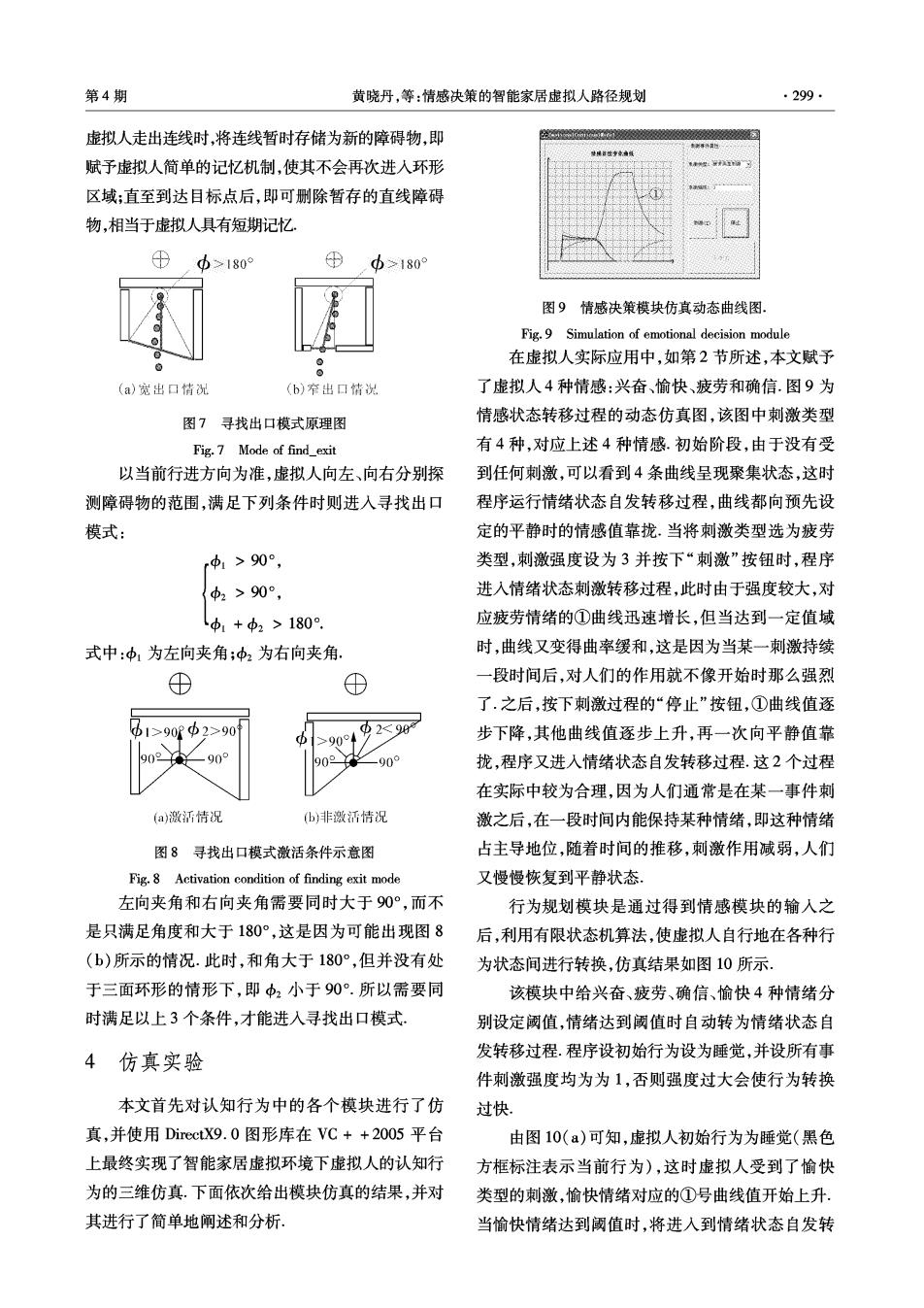
第4期 黄晓丹,等:情感决策的智能家居虚拟人路径规划 299 虚拟人走出连线时,将连线暂时存储为新的障碍物,即 融保谷状身好油观 赋予虚拟人简单的记忆机制,使其不会再次进入环形 区域:直至到达目标点后,即可删除暂存的直线障碍 物,相当于虚拟人具有短期记忆 ⊕ 中>180 ⊕ h>180° 图9情感决策模块仿真动态曲线图, Fig.9 Simulation of emotional decision module 在虚拟人实际应用中,如第2节所述,本文赋予 0 (a)宽出口情况 (b)窄出口情次 了虚拟人4种情感:兴奋、愉快、疲劳和确信.图9为 图7寻找出口模式原理图 情感状态转移过程的动态仿真图,该图中刺激类型 Fig.7 Mode of find_exit 有4种,对应上述4种情感.初始阶段,由于没有受 以当前行进方向为准,虚拟人向左、向右分别探 到任何刺激,可以看到4条曲线呈现聚集状态,这时 测障碍物的范围,满足下列条件时则进入寻找出口 程序运行情绪状态自发转移过程,曲线都向预先设 模式: 定的平静时的情感值靠拢.当将刺激类型选为疲劳 r中1 >90°, 类型,刺激强度设为3并按下“刺激”按钮时,程序 中2>90°, 进入情绪状态刺激转移过程,此时由于强度较大,对 p,+中2>180. 应疲劳情绪的①曲线迅速增长,但当达到一定值域 式中:中,为左向夹角;中2为右向夹角, 时,曲线又变得曲率缓和,这是因为当某一刺激持续 ⊕ 一段时间后,对人们的作用就不像开始时那么强烈 了.之后,按下刺激过程的“停止”按钮,①曲线值逐 1>90PΦ2>90 步下降,其他曲线值逐步上升,再一次向平静值靠 >90 .909 90 90 拢,程序又进入情绪状态自发转移过程.这2个过程 在实际中较为合理,因为人们通常是在某一事件刺 (a)激活情况 (b)非激活情况 激之后,在一段时间内能保持某种情绪,即这种情绪 图8寻找出口模式激活条件示意图 占主导地位,随着时间的推移,刺激作用减弱,人们 Fig.8 Activation condition of finding exit mode 又慢慢恢复到平静状态, 左向夹角和右向夹角需要同时大于90°,而不 行为规划模块是通过得到情感模块的输人之 是只满足角度和大于180°,这是因为可能出现图8 后,利用有限状态机算法,使虚拟人自行地在各种行 (b)所示的情况.此时,和角大于180°,但并没有处 为状态间进行转换,仿真结果如图10所示。 于三面环形的情形下,即中2小于90°.所以需要同 该模块中给兴奋、疲劳、确信、愉快4种情绪分 时满足以上3个条件,才能进入寻找出口模式 别设定阈值,情绪达到阈值时自动转为情绪状态自 4仿真实验 发转移过程.程序设初始行为设为睡觉,并设所有事 件刺激强度均为为1,否则强度过大会使行为转换 本文首先对认知行为中的各个模块进行了仿 过快, 真,并使用DirectX9.0图形库在VC++2005平台 由图10(a)可知,虚拟人初始行为为睡觉(黑色 上最终实现了智能家居虚拟环境下虚拟人的认知行 方框标注表示当前行为),这时虚拟人受到了愉快 为的三维仿真.下面依次给出模块仿真的结果,并对 类型的刺激,愉快情绪对应的①号曲线值开始上升 其进行了简单地阐述和分析, 当愉快情绪达到阈值时,将进入到情绪状态自发转