正在加载图片...
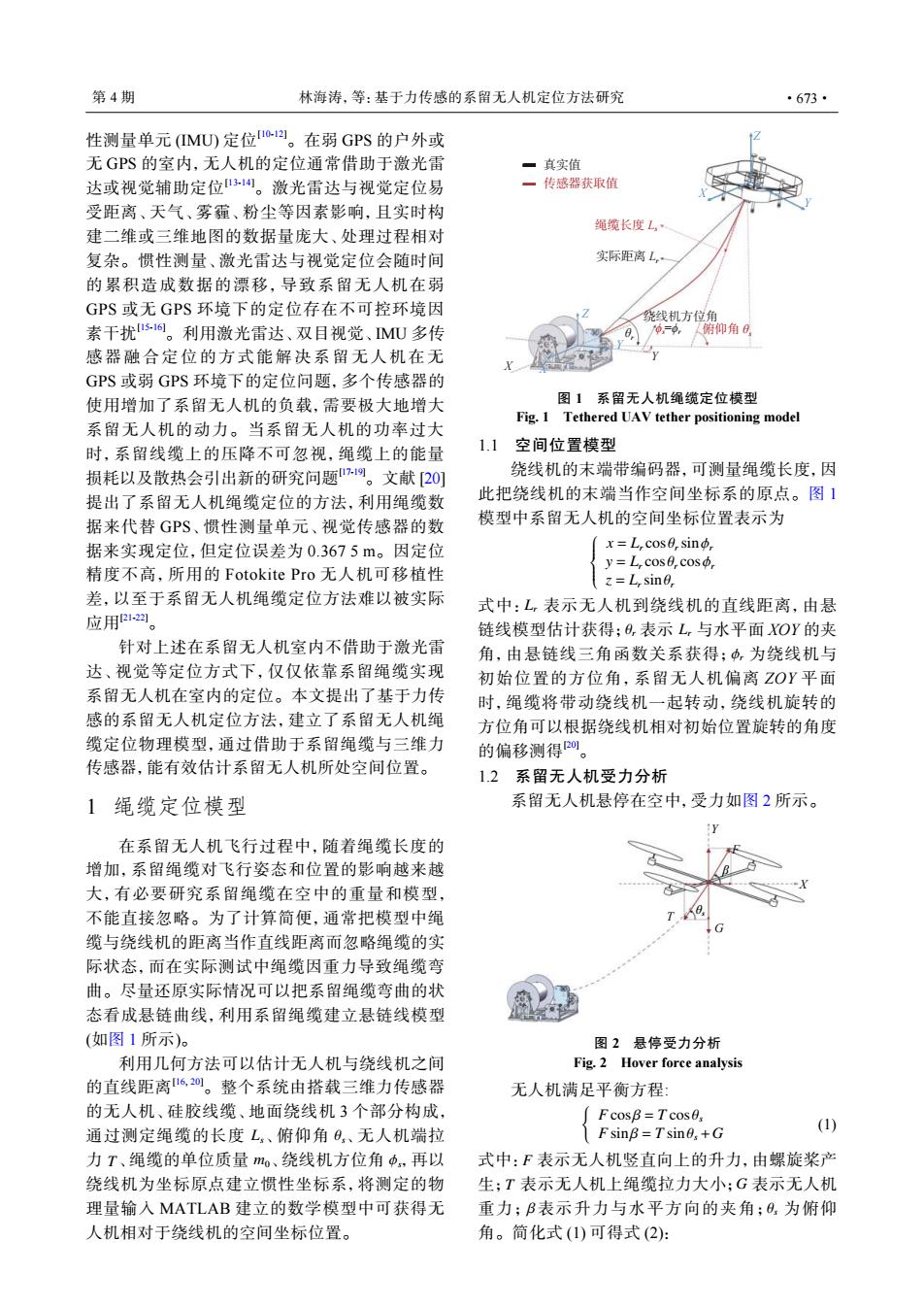
第4期 林海涛,等:基于力传感的系留无人机定位方法研究 ·673· 性测量单元(MU定位o2。在弱GPS的户外或 无GPS的室内,无人机的定位通常借助于激光雷 一真实值 达或视觉辅助定位31。激光雷达与视觉定位易 一传感器获取值 受距离、天气、雾霾、粉尘等因素影响,且实时构 绳缆长度L, 建二维或三维地图的数据量庞大、处理过程相对 复杂。惯性测量、激光雷达与视觉定位会随时间 实际距离L. 的累积造成数据的漂移,导致系留无人机在弱 GPS或无GPS环境下的定位存在不可控环境因 绕线机方位角 素干扰s1。利用激光雷达、双目视觉、MU多传 (俯仰角日 感器融合定位的方式能解决系留无人机在无 GPS或弱GPS环境下的定位问题,多个传感器的 使用增加了系留无人机的负载,需要极大地增大 图1系留无人机绳缆定位模型 Fig.1 Tethered UAV tether positioning model 系留无人机的动力。当系留无人机的功率过大 时,系留线缆上的压降不可忽视,绳缆上的能量 1.1 空间位置模型 损耗以及散热会引出新的研究问题。文献[20] 绕线机的末端带编码器,可测量绳缆长度,因 提出了系留无人机绳缆定位的方法,利用绳缆数 此把绕线机的末端当作空间坐标系的原点。图1 据来代替GPS、惯性测量单元、视觉传感器的数 模型中系留无人机的空间坐标位置表示为 据来实现定位,但定位误差为0.3675m。因定位 x=L,cos0,sino, y=L.cos0 cosd 精度不高,所用的Fotokite Pro无人机可移植性 =L,sin0, 差,以至于系留无人机绳缆定位方法难以被实际 式中:L表示无人机到绕线机的直线距离,由悬 应用2-2 链线模型估计获得;6,表示L,与水平面XOY的夹 针对上述在系留无人机室内不借助于激光雷 角,由悬链线三角函数关系获得;中,为绕线机与 达、视觉等定位方式下,仅仅依靠系留绳缆实现 初始位置的方位角,系留无人机偏离ZOY平面 系留无人机在室内的定位。本文提出了基于力传 时,绳缆将带动绕线机一起转动,绕线机旋转的 感的系留无人机定位方法,建立了系留无人机绳 方位角可以根据绕线机相对初始位置旋转的角度 缆定位物理模型,通过借助于系留绳缆与三维力 的偏移测得o。 传感器,能有效估计系留无人机所处空间位置。 1.2系留无人机受力分析 1绳缆定位模型 系留无人机悬停在空中,受力如图2所示。 在系留无人机飞行过程中,随着绳缆长度的 增加,系留绳缆对飞行姿态和位置的影响越来越 大,有必要研究系留绳缆在空中的重量和模型, 不能直接忽略。为了计算简便,通常把模型中绳 缆与绕线机的距离当作直线距离而忽略绳缆的实 际状态,而在实际测试中绳缆因重力导致绳缆弯 曲。尽量还原实际情况可以把系留绳缆弯曲的状 态看成悬链曲线,利用系留绳缆建立悬链线模型 (如图1所示)。 图2悬停受力分析 利用几何方法可以估计无人机与绕线机之间 Fig.2 Hover force analysis 的直线距离6,0。整个系统由搭载三维力传感器 无人机满足平衡方程: 的无人机、硅胶线缆、地面绕线机3个部分构成, ∫FcosB=Tcos0, 通过测定绳缆的长度L、俯仰角6、无人机端拉 FsinB=Tsin0+G (1) 力T、绳缆的单位质量m0、绕线机方位角中,再以 式中:F表示无人机竖直向上的升力,由螺旋桨产 绕线机为坐标原点建立惯性坐标系,将测定的物 生;T表示无人机上绳缆拉力大小;G表示无人机 理量输入MATLAB建立的数学模型中可获得无 重力;B表示升力与水平方向的夹角;6,为俯仰 人机相对于绕线机的空间坐标位置。 角。简化式(1)可得式(2):性测量单元 (IMU) 定位[10-12]。在弱 GPS 的户外或 无 GPS 的室内,无人机的定位通常借助于激光雷 达或视觉辅助定位[13-14]。激光雷达与视觉定位易 受距离、天气、雾霾、粉尘等因素影响,且实时构 建二维或三维地图的数据量庞大、处理过程相对 复杂。惯性测量、激光雷达与视觉定位会随时间 的累积造成数据的漂移,导致系留无人机在弱 GPS 或无 GPS 环境下的定位存在不可控环境因 素干扰[15-16]。利用激光雷达、双目视觉、IMU 多传 感器融合定位的方式能解决系留无人机在无 GPS 或弱 GPS 环境下的定位问题,多个传感器的 使用增加了系留无人机的负载,需要极大地增大 系留无人机的动力。当系留无人机的功率过大 时,系留线缆上的压降不可忽视,绳缆上的能量 损耗以及散热会引出新的研究问题[17-19]。文献 [20] 提出了系留无人机绳缆定位的方法,利用绳缆数 据来代替 GPS、惯性测量单元、视觉传感器的数 据来实现定位,但定位误差为 0.367 5 m。因定位 精度不高,所用的 Fotokite Pro 无人机可移植性 差,以至于系留无人机绳缆定位方法难以被实际 应用[21-22]。 针对上述在系留无人机室内不借助于激光雷 达、视觉等定位方式下,仅仅依靠系留绳缆实现 系留无人机在室内的定位。本文提出了基于力传 感的系留无人机定位方法,建立了系留无人机绳 缆定位物理模型,通过借助于系留绳缆与三维力 传感器,能有效估计系留无人机所处空间位置。 1 绳缆定位模型 在系留无人机飞行过程中,随着绳缆长度的 增加,系留绳缆对飞行姿态和位置的影响越来越 大,有必要研究系留绳缆在空中的重量和模型, 不能直接忽略。为了计算简便,通常把模型中绳 缆与绕线机的距离当作直线距离而忽略绳缆的实 际状态,而在实际测试中绳缆因重力导致绳缆弯 曲。尽量还原实际情况可以把系留绳缆弯曲的状 态看成悬链曲线,利用系留绳缆建立悬链线模型 (如图 1 所示)。 Ls θs T m0 ϕs 利用几何方法可以估计无人机与绕线机之间 的直线距离[16, 20]。整个系统由搭载三维力传感器 的无人机、硅胶线缆、地面绕线机 3 个部分构成, 通过测定绳缆的长度 、俯仰角 、无人机端拉 力 、绳缆的单位质量 、绕线机方位角 ,再以 绕线机为坐标原点建立惯性坐标系,将测定的物 理量输入 MATLAB 建立的数学模型中可获得无 人机相对于绕线机的空间坐标位置。 绳缆长度 Ls θ 俯仰角 θs r Z Z Y X Y X X Y ϕs=ϕr 实际距离 Lr 绕线机方位角 真实值 传感器获取值 图 1 系留无人机绳缆定位模型 Fig. 1 Tethered UAV tether positioning model 1.1 空间位置模型 绕线机的末端带编码器,可测量绳缆长度,因 此把绕线机的末端当作空间坐标系的原点。图 1 模型中系留无人机的空间坐标位置表示为 x = Lr cos θr sinϕr y = Lr cos θr cosϕr z = Lr sinθr Lr θr Lr ϕr 式中: 表示无人机到绕线机的直线距离,由悬 链线模型估计获得; 表示 与水平面 XOY 的夹 角,由悬链线三角函数关系获得; 为绕线机与 初始位置的方位角,系留无人机偏离 ZOY 平面 时,绳缆将带动绕线机一起转动,绕线机旋转的 方位角可以根据绕线机相对初始位置旋转的角度 的偏移测得[20]。 1.2 系留无人机受力分析 系留无人机悬停在空中,受力如图 2 所示。 Y F β X G T θs 图 2 悬停受力分析 Fig. 2 Hover force analysis 无人机满足平衡方程: { F cosβ = T cos θs F sinβ = T sinθs +G (1) F T G β θs 式中: 表示无人机竖直向上的升力,由螺旋桨产 生; 表示无人机上绳缆拉力大小; 表示无人机 重力; 表示升力与水平方向的夹角; 为俯仰 角。简化式 (1) 可得式 (2): 第 4 期 林海涛,等:基于力传感的系留无人机定位方法研究 ·673·