正在加载图片...
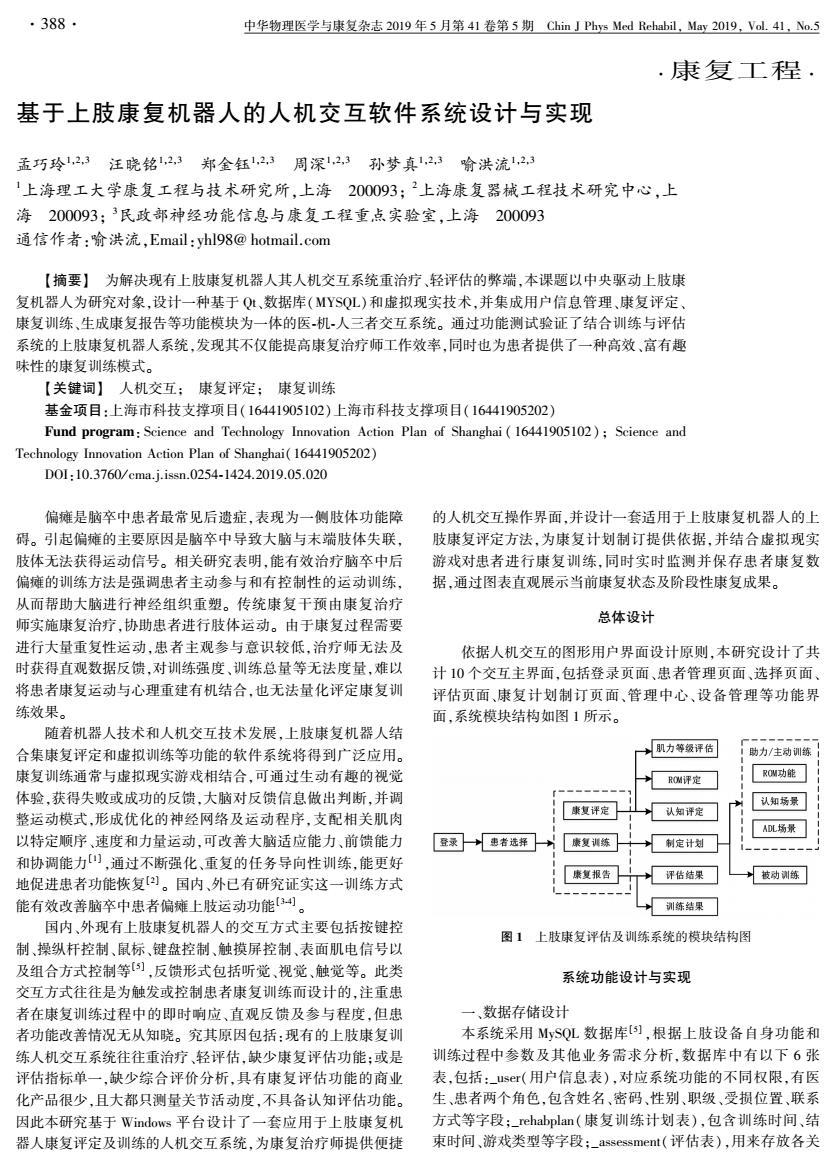
·388· 中华物理医学与康复杂志2019年5月第41卷第5期Chin J Phys Med Rehabil,May2019,Val.41,No.5 ·康复工程· 基于上肢康复机器人的人机交互软件系统设计与实现 孟巧玲12,3汪晓铭2,3郑金钰12,3周深12,3孙梦真12,3喻洪流12,3 1上海理工大学康复工程与技术研究所,上海200093;2上海康复器械工程技术研究中心,上 海200093:3民政部神经功能信息与康复工程重点实验室,上海200093 通信作者:喻洪流,Email:yhl98@hotmail.com 【摘要】为解决现有上肢康复机器人其人机交互系统重治疗、轻评估的弊端,本课题以中央驱动上肢康 复机器人为研究对象,设计一种基于Qt、数据库(MYSQL)和虚拟现实技术,并集成用户信息管理、康复评定、 康复训练、生成康复报告等功能模块为一体的医机-人三者交互系统。通过功能测试验证了结合训练与评估 系统的上肢康复机器人系统,发现其不仅能提高康复治疗师工作效率,同时也为患者提供了一种高效、富有趣 味性的康复训练模式。 【关键词】人机交互;康复评定;康复训练 基金项目:上海市科技支撑项目(16441905102)上海市科技支撑项目(16441905202) Fund program:Science and Technology Innovation Action Plan of Shanghai (16441905102);Science and Technology Innovation Action Plan of Shanghai(16441905202) D0:10.3760/cma-j.issn.0254-1424.2019.05.020 偏瘫是脑卒中患者最常见后遗症,表现为一侧肢体功能障 的人机交互操作界面,并设计一套适用于上肢康复机器人的上 碍。引起偏瘫的主要原因是脑卒中导致大脑与末端肢体失联, 肢康复评定方法,为康复计划制订提供依据,并结合虚拟现实 肢体无法获得运动信号。相关研究表明,能有效治疗脑卒中后 游戏对患者进行康复训练,同时实时监测并保存患者康复数 偏瘫的训练方法是强调患者主动参与和有控制性的运动训练, 据,通过图表直观展示当前康复状态及阶段性康复成果。 从而帮助大脑进行神经组织重塑。传统康复干预由康复治疗 师实施康复治疗,协助患者进行肢体运动。由于康复过程需要 总体设计 进行大量重复性运动,患者主观参与意识较低,治疗师无法及 依据人机交互的图形用户界面设计原则,本研究设计了共 时获得直观数据反馈,对训练强度、训练总量等无法度量,难以 计10个交互主界面,包括登录页面、患者管理页面、选择页面、 将患者康复运动与心理重建有机结合,也无法量化评定康复训 评估页面、康复计划制订页面、管理中心、设备管理等功能界 练效果。 面,系统模块结构如图1所示。 随着机器人技术和人机交互技术发展,上肢康复机器人结 合集康复评定和虚拟训练等功能的软件系统将得到广泛应用。 肌力等级评估 1助力/主动训练 康复训练通常与虚拟现实游戏相结合,可通过生动有趣的视觉 ROM评定 0W功能 体验,获得失败或成功的反馈,大脑对反馈信息做出判断,并调 认知场景 康复评定 整运动模式,形成优化的神经网络及运动程序,支配相关肌肉 认知评定 AL场景 以特定顺序、速度和力量运动,可改善大脑适应能力、前馈能力 登承→患者选择 康复训练 →制定计划 和协调能力),通过不断强化、重复的任务导向性训练,能更好 地促进患者功能恢复四。国内、外已有研究证实这一训练方式 康复报告 评估结果 被动训练 能有效改善脑卒中患者偏瘫上肢运动功能[34]。 训练结果 国内、外现有上肢康复机器人的交互方式主要包括按键控 图1上肢康复评估及训练系统的模块结构图 制、操纵杆控制、鼠标、键盘控制、触摸屏控制、表面肌电信号以 及组合方式控制等),反馈形式包括听觉、视觉、触觉等。此类 系统功能设计与实现 交互方式往往是为触发或控制患者康复训练而设计的,注重患 者在康复训练过程中的即时响应、直观反馈及参与程度,但患 一、数据存储设计 者功能改善情况无从知晓。究其原因包括:现有的上肢康复训 本系统采用MySQL数据库),根据上肢设备自身功能和 练人机交互系统往往重治疗、轻评估,缺少康复评估功能:或是 训练过程中参数及其他业务需求分析,数据库中有以下6张 评估指标单一,缺少综合评价分析,具有康复评估功能的商业 表,包括:_sr(用户信息表),对应系统功能的不同权限,有医 化产品很少,且大都只测量关节活动度,不具备认知评估功能。 生、患者两个角色,包含姓名、密码、性别、职级、受损位置、联系 因此本研究基于Windows平台设计了一套应用于上肢康复机 方式等字段;_rehabplan(康复训练计划表),包含训练时间、结 器人康复评定及训练的人机交互系统,为康复治疗师提供便捷 束时间、游戏类型等字段;-assessment(评估表),用来存放各关康复工程 基于上肢康复机器人的人机交互软件系统设计与实现 孟巧玲1ꎬ2ꎬ3 汪晓铭1ꎬ2ꎬ3 郑金钰1ꎬ2ꎬ3 周深1ꎬ2ꎬ3 孙梦真1ꎬ2ꎬ3 喻洪流1ꎬ2ꎬ3 1上海理工大学康复工程与技术研究所ꎬ上海 200093ꎻ 2上海康复器械工程技术研究中心ꎬ上 海 200093ꎻ 3民政部神经功能信息与康复工程重点实验室ꎬ上海 200093 通信作者:喻洪流ꎬEmail:yhl98@ hotmail.com 【摘要】 为解决现有上肢康复机器人其人机交互系统重治疗、轻评估的弊端ꎬ本课题以中央驱动上肢康 复机器人为研究对象ꎬ设计一种基于 Qt、数据库(MYSQL)和虚拟现实技术ꎬ并集成用户信息管理、康复评定、 康复训练、生成康复报告等功能模块为一体的医 ̄机 ̄人三者交互系统ꎮ 通过功能测试验证了结合训练与评估 系统的上肢康复机器人系统ꎬ发现其不仅能提高康复治疗师工作效率ꎬ同时也为患者提供了一种高效、富有趣 味性的康复训练模式ꎮ 【关键词】 人机交互ꎻ 康复评定ꎻ 康复训练 基金项目:上海市科技支撑项目(16441905102)上海市科技支撑项目(16441905202) Fund program: Science and Technology Innovation Action Plan of Shanghai ( 16441905102)ꎻ Science and Technology Innovation Action Plan of Shanghai(16441905202) DOI:10.3760 / cma.j.issn.0254 ̄1424.2019.05.020 偏瘫是脑卒中患者最常见后遗症ꎬ表现为一侧肢体功能障 碍ꎮ 引起偏瘫的主要原因是脑卒中导致大脑与末端肢体失联ꎬ 肢体无法获得运动信号ꎮ 相关研究表明ꎬ能有效治疗脑卒中后 偏瘫的训练方法是强调患者主动参与和有控制性的运动训练ꎬ 从而帮助大脑进行神经组织重塑ꎮ 传统康复干预由康复治疗 师实施康复治疗ꎬ协助患者进行肢体运动ꎮ 由于康复过程需要 进行大量重复性运动ꎬ患者主观参与意识较低ꎬ治疗师无法及 时获得直观数据反馈ꎬ对训练强度、训练总量等无法度量ꎬ难以 将患者康复运动与心理重建有机结合ꎬ也无法量化评定康复训 练效果ꎮ 随着机器人技术和人机交互技术发展ꎬ上肢康复机器人结 合集康复评定和虚拟训练等功能的软件系统将得到广泛应用ꎮ 康复训练通常与虚拟现实游戏相结合ꎬ可通过生动有趣的视觉 体验ꎬ获得失败或成功的反馈ꎬ大脑对反馈信息做出判断ꎬ并调 整运动模式ꎬ形成优化的神经网络及运动程序ꎬ支配相关肌肉 以特定顺序、速度和力量运动ꎬ可改善大脑适应能力、前馈能力 和协调能力[1] ꎬ通过不断强化、重复的任务导向性训练ꎬ能更好 地促进患者功能恢复[2] ꎮ 国内、外已有研究证实这一训练方式 能有效改善脑卒中患者偏瘫上肢运动功能[3 ̄4] ꎮ 国内、外现有上肢康复机器人的交互方式主要包括按键控 制、操纵杆控制、鼠标、键盘控制、触摸屏控制、表面肌电信号以 及组合方式控制等[5] ꎬ反馈形式包括听觉、视觉、触觉等ꎮ 此类 交互方式往往是为触发或控制患者康复训练而设计的ꎬ注重患 者在康复训练过程中的即时响应、直观反馈及参与程度ꎬ但患 者功能改善情况无从知晓ꎮ 究其原因包括:现有的上肢康复训 练人机交互系统往往重治疗、轻评估ꎬ缺少康复评估功能ꎻ或是 评估指标单一ꎬ缺少综合评价分析ꎬ具有康复评估功能的商业 化产品很少ꎬ且大都只测量关节活动度ꎬ不具备认知评估功能ꎮ 因此本研究基于 Windows 平台设计了一套应用于上肢康复机 器人康复评定及训练的人机交互系统ꎬ为康复治疗师提供便捷 的人机交互操作界面ꎬ并设计一套适用于上肢康复机器人的上 肢康复评定方法ꎬ为康复计划制订提供依据ꎬ并结合虚拟现实 游戏对患者进行康复训练ꎬ同时实时监测并保存患者康复数 据ꎬ通过图表直观展示当前康复状态及阶段性康复成果ꎮ 总体设计 依据人机交互的图形用户界面设计原则ꎬ本研究设计了共 计 10 个交互主界面ꎬ包括登录页面、患者管理页面、选择页面、 评估页面、康复计划制订页面、管理中心、设备管理等功能界 面ꎬ系统模块结构如图 1 所示ꎮ 图 1 上肢康复评估及训练系统的模块结构图 系统功能设计与实现 一、数据存储设计 本系统采用 MySQL 数据库[5] ꎬ根据上肢设备自身功能和 训练过程中参数及其他业务需求分析ꎬ数据库中有以下 6 张 表ꎬ包括:_user(用户信息表)ꎬ对应系统功能的不同权限ꎬ有医 生、患者两个角色ꎬ包含姓名、密码、性别、职级、受损位置、联系 方式等字段ꎻ_rehabplan(康复训练计划表)ꎬ包含训练时间、结 束时间、游戏类型等字段ꎻ_assessment(评估表)ꎬ用来存放各关 388 中华物理医学与康复杂志 2019 年 5 月第 41 卷第 5 期 Chin J Phys Med Rehabilꎬ May 2019ꎬ Vol. 41ꎬ No.5