正在加载图片...
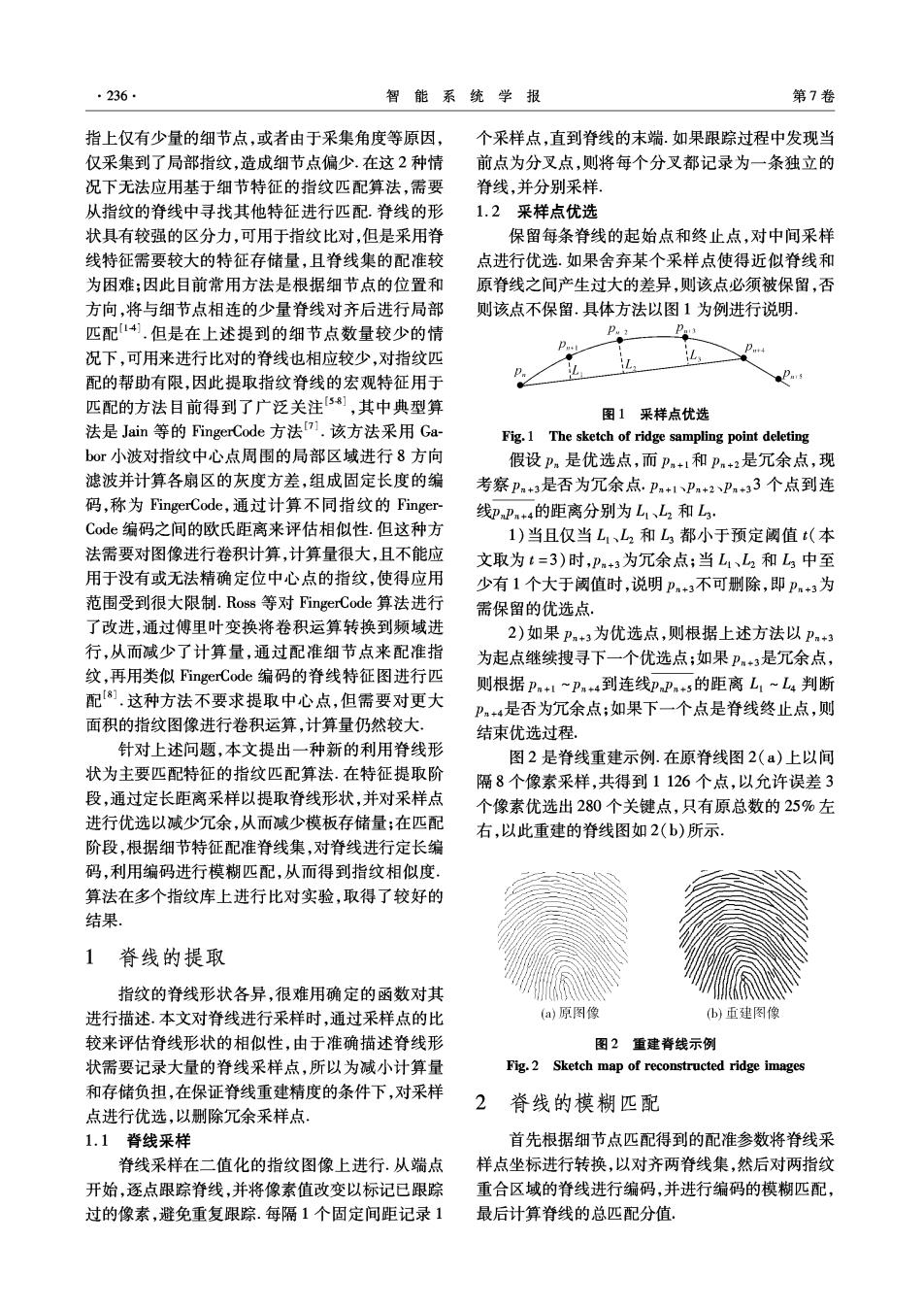
·236 智能系统学报 第7卷 指上仅有少量的细节点,或者由于采集角度等原因, 个采样点,直到脊线的末端.如果跟踪过程中发现当 仅采集到了局部指纹,造成细节点偏少.在这2种情 前点为分叉点,则将每个分叉都记录为一条独立的 况下无法应用基于细节特征的指纹匹配算法,需要 脊线,并分别采样。 从指纹的脊线中寻找其他特征进行匹配.脊线的形 1.2采样点优选 状具有较强的区分力,可用于指纹比对,但是采用脊 保留每条脊线的起始点和终止点,对中间采样 线特征需要较大的特征存储量,且脊线集的配准较 点进行优选.如果舍弃某个采样点使得近似脊线和 为困难;因此目前常用方法是根据细节点的位置和 原脊线之间产生过大的差异,则该点必须被保留,否 方向,将与细节点相连的少量脊线对齐后进行局部 则该点不保留.具体方法以图1为例进行说明, 匹配14.但是在上述提到的细节点数量较少的情 况下,可用来进行比对的脊线也相应较少,对指纹匹 y 配的帮助有限,因此提取指纹脊线的宏观特征用于 匹配的方法目前得到了广泛关注51,其中典型算 图1采样点优选 法是Jain等的FingerCode方法[.该方法采用Ga Fig.1 The sketch of ridge sampling point deleting bor小波对指纹中心点周围的局部区域进行8方向 假设Pn是优选点,而Pa+1和P+2是冗余点,现 滤波并计算各扇区的灰度方差,组成固定长度的编 考察Pn+3是否为冗余点P+1Pn+2Pn+33个点到连 码,称为FingerCode,通过计算不同指纹的Finger- 线PP+4的距离分别为L1、L2和L3, Code编码之间的欧氏距离来评估相似性.但这种方 1)当且仅当L1、L2和L3都小于预定阈值t(本 法需要对图像进行卷积计算,计算量很大,且不能应 文取为t=3)时,Pa+3为冗余点;当L1、L2和L3中至 用于没有或无法精确定位中心点的指纹,使得应用 少有1个大于阂值时,说明P+3不可删除,即Pn+3为 范围受到很大限制.Ross等对FingerCode算法进行 需保留的优选点, 了改进,通过傅里叶变换将卷积运算转换到频域进 2)如果Pn+3为优选点,则根据上述方法以Pa+3 行,从而减少了计算量,通过配准细节点来配准指 为起点继续搜寻下一个优选点;如果P.+3是冗余点, 纹,再用类似FingerCode编码的脊线特征图进行匹 则根据P.+1~P+4到连线PP+5的距离L1~L4判断 配们.这种方法不要求提取中心点,但需要对更大 Pa+4是否为冗余点;如果下一个点是脊线终止点,则 面积的指纹图像进行卷积运算,计算量仍然较大. 结束优选过程。 针对上述问题,本文提出一种新的利用脊线形 图2是脊线重建示例.在原脊线图2(a)上以间 状为主要匹配特征的指纹匹配算法.在特征提取阶 隔8个像素采样,共得到1126个点,以允许误差3 段,通过定长距离采样以提取脊线形状,并对采样点 个像素优选出280个关键点,只有原总数的25%左 进行优选以减少冗余,从而减少模板存储量;在匹配 右,以此重建的脊线图如2(b)所示。 阶段,根据细节特征配准脊线集,对脊线进行定长编 码,利用编码进行模糊匹配,从而得到指纹相似度 算法在多个指纹库上进行比对实验,取得了较好的 结果。 1脊线的提取 指纹的脊线形状各异,很难用确定的函数对其 进行描述,本文对脊线进行采样时,通过采样点的比 (a)原图像 (b)重建图像 较来评估脊线形状的相似性,由于准确描述脊线形 图2重建脊线示例 状需要记录大量的脊线采样点,所以为减小计算量 Fig.2 Sketch map of reconstructed ridge images 和存储负担,在保证脊线重建精度的条件下,对采样 2 脊线的模糊匹配 点进行优选,以删除冗余采样点, 1.1脊线采样 首先根据细节点匹配得到的配准参数将脊线采 脊线采样在二值化的指纹图像上进行.从端点 样点坐标进行转换,以对齐两脊线集,然后对两指纹 开始,逐点跟踪脊线,并将像素值改变以标记已跟踪 重合区域的脊线进行编码,并进行编码的模糊匹配, 过的像素,避免重复跟踪.每隔1个固定间距记录1 最后计算脊线的总匹配分值