正在加载图片...
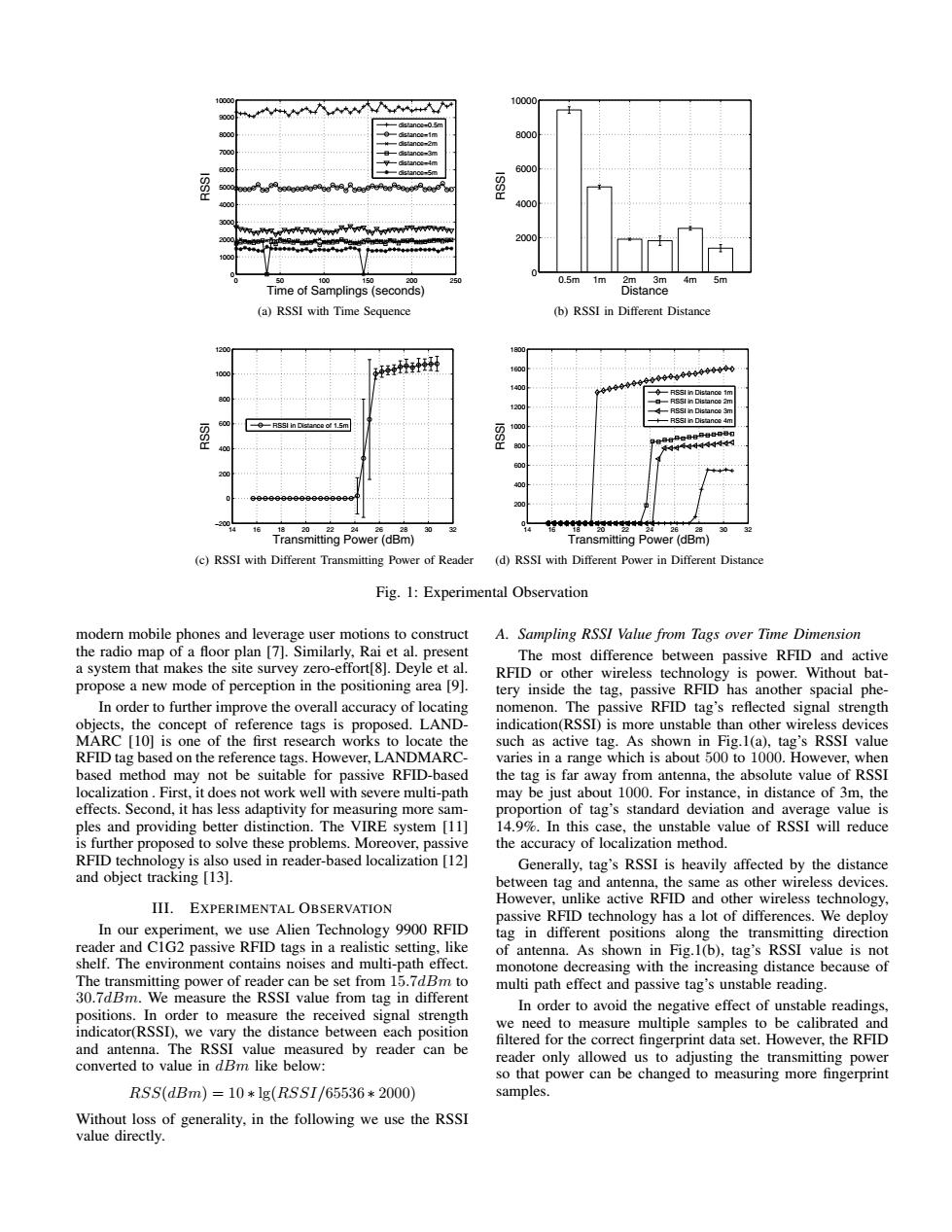
10000 8000 6000 4000 2000 0.5m 1m Distan 3m 4m Time of Samplings(seconds) (a)RSSI with Time Sequence (b)RSSI in Different Distance 120 斑到 160 140 R5nDnc1m 1200 RSSI in Distance of 1.5m -R5SI in Distanoe 4m 800 40 200 16 1820..22 24 26 28 30 30 Transmitting Power (dBm) Transmitting Power(dBm) (c)RSSI with Different Transmitting Power of Reader (d)RSSI with Different Power in Different Distance Fig.1:Experimental Observation modern mobile phones and leverage user motions to construct A.Sampling RSSI Value from Tags over Time Dimension the radio map of a floor plan [7].Similarly,Rai et al.present The most difference between passive RFID and active a system that makes the site survey zero-effort[8].Deyle et al. RFID or other wireless technology is power.Without bat- propose a new mode of perception in the positioning area [9]. tery inside the tag,passive RFID has another spacial phe- In order to further improve the overall accuracy of locating nomenon.The passive RFID tag's reflected signal strength objects,the concept of reference tags is proposed.LAND- indication(RSSI)is more unstable than other wireless devices MARC [10]is one of the first research works to locate the such as active tag.As shown in Fig.1(a),tag's RSSI value RFID tag based on the reference tags.However,LANDMARC- varies in a range which is about 500 to 1000.However,when based method may not be suitable for passive RFID-based the tag is far away from antenna,the absolute value of RSSI localization.First,it does not work well with severe multi-path may be just about 1000.For instance,in distance of 3m,the effects.Second,it has less adaptivity for measuring more sam- proportion of tag's standard deviation and average value is ples and providing better distinction.The VIRE system [11] 14.9%.In this case.the unstable value of RSSI will reduce is further proposed to solve these problems.Moreover,passive the accuracy of localization method. RFID technology is also used in reader-based localization [12] Generally,tag's RSSI is heavily affected by the distance and object tracking [13]. between tag and antenna,the same as other wireless devices. III.EXPERIMENTAL OBSERVATION However,unlike active RFID and other wireless technology, passive RFID technology has a lot of differences.We deploy In our experiment,we use Alien Technology 9900 RFID tag in different positions along the transmitting direction reader and C1G2 passive RFID tags in a realistic setting,like of antenna.As shown in Fig.1(b),tag's RSSI value is not shelf.The environment contains noises and multi-path effect. monotone decreasing with the increasing distance because of The transmitting power of reader can be set from 15.7dBm to multi path effect and passive tag's unstable reading. 30.7dBm.We measure the RSSI value from tag in different In order to avoid the negative effect of unstable readings positions.In order to measure the received signal strength indicator(RSSD),we vary the distance between each position we need to measure multiple samples to be calibrated and and antenna.The RSSI value measured by reader can be filtered for the correct fingerprint data set.However,the RFID converted to value in dBm like below: reader only allowed us to adjusting the transmitting power so that power can be changed to measuring more fingerprint RSS(dBm)=10*1g(RSSI/65536*2000) samples. Without loss of generality,in the following we use the RSSI value directly.0 50 100 150 200 250 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 Time of Samplings (seconds) RSSI distance=0.5m distance=1m distance=2m distance=3m distance=4m distance=5m (a) RSSI with Time Sequence 0.5m 1m 2m 3m 4m 5m 0 2000 4000 6000 8000 10000 RSSI Distance (b) RSSI in Different Distance 14 16 18 20 22 24 26 28 30 32 −200 0 200 400 600 800 1000 1200 Transmitting Power (dBm) RSSI RSSI in Distance of 1.5m (c) RSSI with Different Transmitting Power of Reader 14 16 18 20 22 24 26 28 30 32 0 200 400 600 800 1000 1200 1400 1600 1800 Transmitting Power (dBm) RSSI RSSI in Distance 1m RSSI in Distance 2m RSSI in Distance 3m RSSI in Distance 4m (d) RSSI with Different Power in Different Distance Fig. 1: Experimental Observation modern mobile phones and leverage user motions to construct the radio map of a floor plan [7]. Similarly, Rai et al. present a system that makes the site survey zero-effort[8]. Deyle et al. propose a new mode of perception in the positioning area [9]. In order to further improve the overall accuracy of locating objects, the concept of reference tags is proposed. LANDMARC [10] is one of the first research works to locate the RFID tag based on the reference tags. However, LANDMARCbased method may not be suitable for passive RFID-based localization . First, it does not work well with severe multi-path effects. Second, it has less adaptivity for measuring more samples and providing better distinction. The VIRE system [11] is further proposed to solve these problems. Moreover, passive RFID technology is also used in reader-based localization [12] and object tracking [13]. III. EXPERIMENTAL OBSERVATION In our experiment, we use Alien Technology 9900 RFID reader and C1G2 passive RFID tags in a realistic setting, like shelf. The environment contains noises and multi-path effect. The transmitting power of reader can be set from 15.7dBm to 30.7dBm. We measure the RSSI value from tag in different positions. In order to measure the received signal strength indicator(RSSI), we vary the distance between each position and antenna. The RSSI value measured by reader can be converted to value in dBm like below: RSS(dBm) = 10 ∗ lg(RSSI/65536 ∗ 2000) Without loss of generality, in the following we use the RSSI value directly. A. Sampling RSSI Value from Tags over Time Dimension The most difference between passive RFID and active RFID or other wireless technology is power. Without battery inside the tag, passive RFID has another spacial phenomenon. The passive RFID tag’s reflected signal strength indication(RSSI) is more unstable than other wireless devices such as active tag. As shown in Fig.1(a), tag’s RSSI value varies in a range which is about 500 to 1000. However, when the tag is far away from antenna, the absolute value of RSSI may be just about 1000. For instance, in distance of 3m, the proportion of tag’s standard deviation and average value is 14.9%. In this case, the unstable value of RSSI will reduce the accuracy of localization method. Generally, tag’s RSSI is heavily affected by the distance between tag and antenna, the same as other wireless devices. However, unlike active RFID and other wireless technology, passive RFID technology has a lot of differences. We deploy tag in different positions along the transmitting direction of antenna. As shown in Fig.1(b), tag’s RSSI value is not monotone decreasing with the increasing distance because of multi path effect and passive tag’s unstable reading. In order to avoid the negative effect of unstable readings, we need to measure multiple samples to be calibrated and filtered for the correct fingerprint data set. However, the RFID reader only allowed us to adjusting the transmitting power so that power can be changed to measuring more fingerprint samples