正在加载图片...
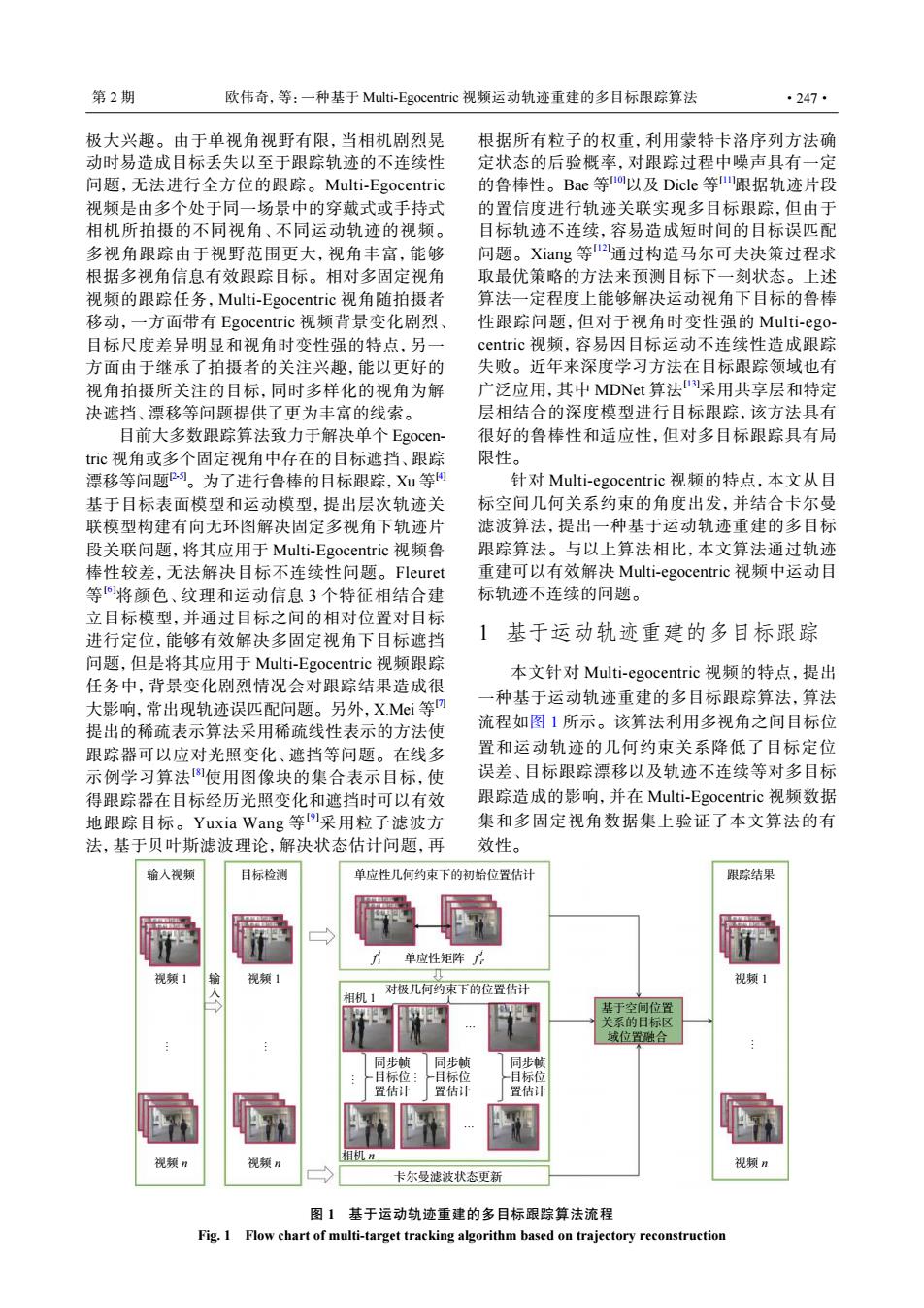
第2期 欧伟奇,等:一种基于Multi-Egocentric视频运动轨迹重建的多目标跟踪算法 ·247· 极大兴趣。由于单视角视野有限,当相机剧烈晃 根据所有粒子的权重,利用蒙特卡洛序列方法确 动时易造成目标丢失以至于跟踪轨迹的不连续性 定状态的后验概率,对跟踪过程中噪声具有一定 问题,无法进行全方位的跟踪。Multi-Egocentric 的鲁棒性。Bae等o以及Dicle等跟据轨迹片段 视频是由多个处于同一场景中的穿戴式或手持式 的置信度进行轨迹关联实现多目标跟踪,但由于 相机所拍摄的不同视角、不同运动轨迹的视频。 目标轨迹不连续,容易造成短时间的目标误匹配 多视角跟踪由于视野范围更大,视角丰富,能够 问题。Xiang等2l通过构造马尔可夫决策过程求 根据多视角信息有效跟踪目标。相对多固定视角 取最优策略的方法来预测目标下一刻状态。上述 视频的跟踪任务,Multi-.Egocentric视角随拍摄者 算法一定程度上能够解决运动视角下目标的鲁棒 移动,一方面带有Egocentric视频背景变化剧烈、 性跟踪问题,但对于视角时变性强的Multi--ego 目标尺度差异明显和视角时变性强的特点,另一 centric视频,容易因目标运动不连续性造成跟踪 方面由于继承了拍摄者的关注兴趣,能以更好的 失败。近年来深度学习方法在目标跟踪领域也有 视角拍摄所关注的目标,同时多样化的视角为解 广泛应用,其中MDNet算法采用共享层和特定 决遮挡、漂移等问题提供了更为丰富的线索。 层相结合的深度模型进行目标跟踪,该方法具有 目前大多数跟踪算法致力于解决单个Egocen- 很好的鲁棒性和适应性,但对多目标跟踪具有局 tic视角或多个固定视角中存在的目标遮挡、跟踪 限性。 漂移等问题。为了进行鲁棒的目标跟踪,Xu等 针对Multi--egocentric视频的特点,本文从目 基于目标表面模型和运动模型,提出层次轨迹关 标空间几何关系约束的角度出发,并结合卡尔曼 联模型构建有向无环图解决固定多视角下轨迹片 滤波算法,提出一种基于运动轨迹重建的多目标 段关联问题,将其应用于Multi-Egocentric视频鲁 跟踪算法。与以上算法相比,本文算法通过轨迹 棒性较差,无法解决目标不连续性问题。Fleuret 重建可以有效解决Multi--egocentric视频中运动目 等将颜色、纹理和运动信息3个特征相结合建 标轨迹不连续的问题。 立目标模型,并通过目标之间的相对位置对目标 进行定位,能够有效解决多固定视角下目标遮挡 1基于运动轨迹重建的多目标跟踪 问题,但是将其应用于Multi-Egocentric视频跟踪 本文针对Multi--egocentric视频的特点,提出 任务中,背景变化烈情况会对跟踪结果造成很 大影响,常出现轨迹误匹配问题。另外,XMi等 一种基于运动轨迹重建的多目标跟踪算法,算法 提出的稀疏表示算法采用稀疏线性表示的方法使 流程如图1所示。该算法利用多视角之间目标位 跟踪器可以应对光照变化、遮挡等问题。在线多 置和运动轨迹的几何约束关系降低了目标定位 示例学习算法使用图像块的集合表示目标,使 误差、目标跟踪漂移以及轨迹不连续等对多目标 得跟踪器在目标经历光照变化和遮挡时可以有效 跟踪造成的影响,并在Multi--Egocentric视频数据 地跟踪目标。Yuxia Wang等采用粒子滤波方 集和多固定视角数据集上验证了本文算法的有 法,基于贝叶斯滤波理论,解决状态估计问题,再 效性。 输入视频 目标检测 单应性几何约束下的初始位置估计 跟踪结果 单应性矩阵 视1 视频1 视频1 对极几何约束下的位置估计 相机1 基于空间位置 关系的目标区 域位置融合 同步帧 同步帧 同步帧 目标位: 目标位 目标位 置估计 置估计 置估计 视颜n 视颜n 相机n 视频n 卡尔曼滤波状态更新 图1基于运动轨迹重建的多目标跟踪算法流程 Fig.1 Flow chart of multi-target tracking algorithm based on trajectory reconstruction极大兴趣。由于单视角视野有限,当相机剧烈晃 动时易造成目标丢失以至于跟踪轨迹的不连续性 问题,无法进行全方位的跟踪。Multi-Egocentric 视频是由多个处于同一场景中的穿戴式或手持式 相机所拍摄的不同视角、不同运动轨迹的视频。 多视角跟踪由于视野范围更大,视角丰富,能够 根据多视角信息有效跟踪目标。相对多固定视角 视频的跟踪任务,Multi-Egocentric 视角随拍摄者 移动,一方面带有 Egocentric 视频背景变化剧烈、 目标尺度差异明显和视角时变性强的特点,另一 方面由于继承了拍摄者的关注兴趣,能以更好的 视角拍摄所关注的目标,同时多样化的视角为解 决遮挡、漂移等问题提供了更为丰富的线索。 目前大多数跟踪算法致力于解决单个 Egocentric 视角或多个固定视角中存在的目标遮挡、跟踪 漂移等问题[2-5]。为了进行鲁棒的目标跟踪,Xu 等 [4] 基于目标表面模型和运动模型,提出层次轨迹关 联模型构建有向无环图解决固定多视角下轨迹片 段关联问题,将其应用于 Multi-Egocentric 视频鲁 棒性较差,无法解决目标不连续性问题。Fleuret 等 [6]将颜色、纹理和运动信息 3 个特征相结合建 立目标模型,并通过目标之间的相对位置对目标 进行定位,能够有效解决多固定视角下目标遮挡 问题,但是将其应用于 Multi-Egocentric 视频跟踪 任务中,背景变化剧烈情况会对跟踪结果造成很 大影响,常出现轨迹误匹配问题。另外,X.Mei 等 [7] 提出的稀疏表示算法采用稀疏线性表示的方法使 跟踪器可以应对光照变化、遮挡等问题。在线多 示例学习算法[8]使用图像块的集合表示目标,使 得跟踪器在目标经历光照变化和遮挡时可以有效 地跟踪目标。Yuxia Wang 等 [9]采用粒子滤波方 法,基于贝叶斯滤波理论,解决状态估计问题,再 根据所有粒子的权重,利用蒙特卡洛序列方法确 定状态的后验概率,对跟踪过程中噪声具有一定 的鲁棒性。Bae 等 [10]以及 Dicle 等 [11]跟据轨迹片段 的置信度进行轨迹关联实现多目标跟踪,但由于 目标轨迹不连续,容易造成短时间的目标误匹配 问题。Xiang 等 [12]通过构造马尔可夫决策过程求 取最优策略的方法来预测目标下一刻状态。上述 算法一定程度上能够解决运动视角下目标的鲁棒 性跟踪问题,但对于视角时变性强的 Multi-egocentric 视频,容易因目标运动不连续性造成跟踪 失败。近年来深度学习方法在目标跟踪领域也有 广泛应用,其中 MDNet 算法[13]采用共享层和特定 层相结合的深度模型进行目标跟踪,该方法具有 很好的鲁棒性和适应性,但对多目标跟踪具有局 限性。 针对 Multi-egocentric 视频的特点,本文从目 标空间几何关系约束的角度出发,并结合卡尔曼 滤波算法,提出一种基于运动轨迹重建的多目标 跟踪算法。与以上算法相比,本文算法通过轨迹 重建可以有效解决 Multi-egocentric 视频中运动目 标轨迹不连续的问题。 1 基于运动轨迹重建的多目标跟踪 本文针对 Multi-egocentric 视频的特点,提出 一种基于运动轨迹重建的多目标跟踪算法,算法 流程如图 1 所示。该算法利用多视角之间目标位 置和运动轨迹的几何约束关系降低了目标定位 误差、目标跟踪漂移以及轨迹不连续等对多目标 跟踪造成的影响,并在 Multi-Egocentric 视频数据 集和多固定视角数据集上验证了本文算法的有 效性。 基于空间位置 关系的目标区 域位置融合 视频 1 跟踪结果 视频 n 视频 1 输入视频 视频 n 视频 1 目标检测 单应性几何约束下的初始位置估计 单应性矩阵 相机 1 相机 n 对极几何约束下的位置估计 卡尔曼滤波状态更新 同步帧 目标位 置估计 同步帧 目标位 置估计 同步帧 目标位 置估计 输 入 视频 n f j i f j i′ … … … … … … … 图 1 基于运动轨迹重建的多目标跟踪算法流程 Fig. 1 Flow chart of multi-target tracking algorithm based on trajectory reconstruction 第 2 期 欧伟奇,等:一种基于 Multi-Egocentric 视频运动轨迹重建的多目标跟踪算法 ·247·