正在加载图片...
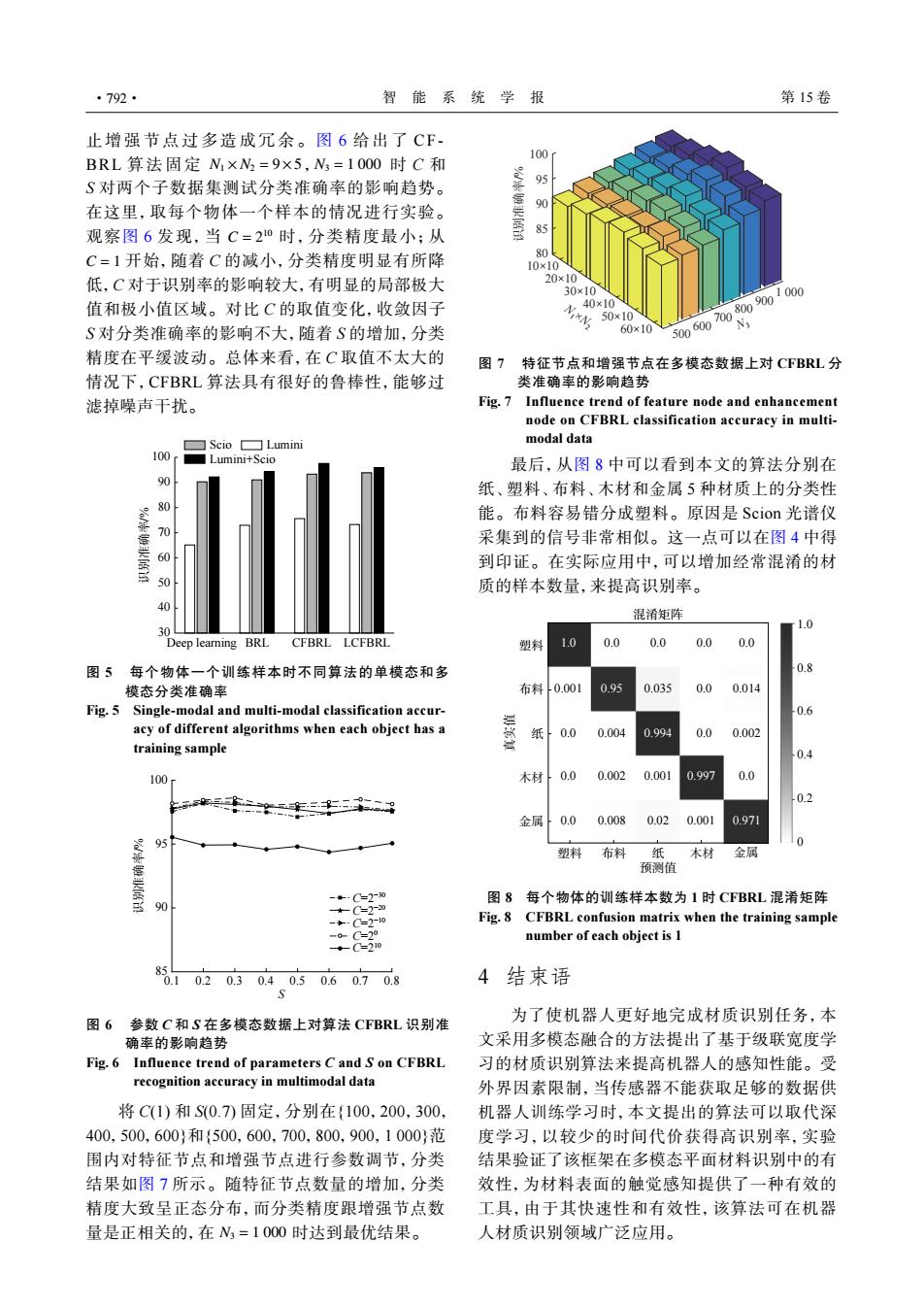
·792· 智能系统学报 第15卷 止增强节点过多造成冗余。图6给出了CF 100 BRL算法固定N1XN2=9×5,N3=10O0时C和 S对两个子数据集测试分类准确率的影响趋势。 在这里,取每个物体一个样本的情况进行实验。 观察图6发现,当C=20时,分类精度最小;从 C=1开始,随着C的减小,分类精度明显有所降 10×10 低,C对于识别率的影响较大,有明显的局部极大 20×10 30×10 值和极小值区域。对比C的取值变化,收敛因子 S对分类准确率的影响不大,随着S的增加,分类 60×10 s006007008009001000 N 精度在平缓波动。总体来看,在C取值不太大的 图7 特征节点和增强节点在多模态数据上对CFBRL分 情况下,CFBRL算法具有很好的鲁棒性,能够过 类准确率的影响趋势 滤掉噪声干扰。 Fig.7 Influence trend of feature node and enhancement node on CFBRL classification accuracy in multi- ]Scio☐Lumini modal data 100 Lumini+Scio 最后,从图8中可以看到本文的算法分别在 纸、塑料、布料、木材和金属5种材质上的分类性 能。布料容易错分成塑料。原因是Scion光谱仪 70 采集到的信号非常相似。这一点可以在图4中得 6 到印证。在实际应用中,可以增加经常混淆的材 50 质的样本数量,来提高识别率。 混淆矩阵 1.0 Deep learning BRL CFBRL LCFBRL 塑料 o 0.0 0.0 0.0 0.0 图5每个物体一个训练样本时不同算法的单模态和多 0.8 模态分类准确率 布料 0.001 0.95 0.035 0.0 0.014 Fig.5 Single-modal and multi-modal classification accur- 0.6 acy of different algorithms when each object has a 纸 0.0 0.004 0.994 0.0 0.002 training sample 0.4 100 木材 0.0 0.002 0.001 0.997 0.0 0.2 金属 0.0 0.008 0.02 0.001 0.971 95 塑料 布料 纸 木材 金属 预测值 --C=20 图8每个物体的训练样本数为1时CFBRL混淆矩阵 90 C=220 -= Fig.8 CFBRL confusion matrix when the training sample =20 number of each object is 1 C=20 85 .10.20.30.40.50.60.70.8 4结束语 图6参数C和S在多模态数据上对算法CFBRL识别准 为了使机器人更好地完成材质识别任务,本 确率的影响趋势 文采用多模态融合的方法提出了基于级联宽度学 Fig.6 Influence trend of parameters C and S on CFBRL 习的材质识别算法来提高机器人的感知性能。受 recognition accuracy in multimodal data 外界因素限制,当传感器不能获取足够的数据供 将C(1)和S0.7)固定,分别在{100,200,300, 机器人训练学习时,本文提出的算法可以取代深 400,500,600}和{500,600,700,800,900,1000}范 度学习,以较少的时间代价获得高识别率,实验 围内对特征节点和增强节点进行参数调节,分类 结果验证了该框架在多模态平面材料识别中的有 结果如图7所示。随特征节点数量的增加,分类 效性,为材料表面的触觉感知提供了一种有效的 精度大致呈正态分布,而分类精度跟增强节点数 工具,由于其快速性和有效性,该算法可在机器 量是正相关的,在N=1000时达到最优结果。 人材质识别领域广泛应用。N1 ×N2 = 9×5 N3 = 1 000 C = 2 10 C = 1 止增强节点过多造成冗余。 图 6 给 出 了 C FBRL 算法固定 , 时 C 和 S 对两个子数据集测试分类准确率的影响趋势。 在这里,取每个物体一个样本的情况进行实验。 观察图 6 发现,当 时,分类精度最小;从 开始,随着 C 的减小,分类精度明显有所降 低,C 对于识别率的影响较大,有明显的局部极大 值和极小值区域。对比 C 的取值变化,收敛因子 S 对分类准确率的影响不大,随着 S 的增加,分类 精度在平缓波动。总体来看,在 C 取值不太大的 情况下,CFBRL 算法具有很好的鲁棒性,能够过 滤掉噪声干扰。 100 90 80 70 60 50 40 30 识别准确率/% Deep learning BRL CFBRL LCFBRL Scio Lumini Lumini+Scio 图 5 每个物体一个训练样本时不同算法的单模态和多 模态分类准确率 Fig. 5 Single-modal and multi-modal classification accuracy of different algorithms when each object has a training sample 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 S 85 90 95 100 C=2−30 C=2−20 C=2−10 C=20 C=210 识别准确率/% 图 6 参数 C 和 S 在多模态数据上对算法 CFBRL 识别准 确率的影响趋势 Fig. 6 Influence trend of parameters C and S on CFBRL recognition accuracy in multimodal data N3 = 1 000 将 C(1) 和 S(0.7) 固定,分别在{100,200,300, 400,500,600}和{500,600,700,800,900,1 000}范 围内对特征节点和增强节点进行参数调节,分类 结果如图 7 所示。随特征节点数量的增加,分类 精度大致呈正态分布,而分类精度跟增强节点数 量是正相关的,在 时达到最优结果。 80 85 10×10 90 20×10 95 100 30×10 1 000 N1×N2 40×10 900 N3 800 50×10 700 600 60×10 500 识别准确率/% 图 7 特征节点和增强节点在多模态数据上对 CFBRL 分 类准确率的影响趋势 Fig. 7 Influence trend of feature node and enhancement node on CFBRL classification accuracy in multimodal data 最后,从图 8 中可以看到本文的算法分别在 纸、塑料、布料、木材和金属 5 种材质上的分类性 能。布料容易错分成塑料。原因是 Scion 光谱仪 采集到的信号非常相似。这一点可以在图 4 中得 到印证。在实际应用中,可以增加经常混淆的材 质的样本数量,来提高识别率。 1.0 0.95 0.994 0.997 0.971 0.0 1.0 0.8 0.6 0.4 0.2 0 0.001 0.0 0.004 0.0 0.002 0.001 0.0 0.008 0.02 0.001 0.0 0.002 0.0 0.035 0.0 0.0 0.0 0.014 塑料 0.0 塑料 布料 纸 预测值 真实值 木材 金属 布料 纸 木材 金属 混淆矩阵 图 8 每个物体的训练样本数为 1 时 CFBRL 混淆矩阵 Fig. 8 CFBRL confusion matrix when the training sample number of each object is 1 4 结束语 为了使机器人更好地完成材质识别任务,本 文采用多模态融合的方法提出了基于级联宽度学 习的材质识别算法来提高机器人的感知性能。受 外界因素限制,当传感器不能获取足够的数据供 机器人训练学习时,本文提出的算法可以取代深 度学习,以较少的时间代价获得高识别率,实验 结果验证了该框架在多模态平面材料识别中的有 效性,为材料表面的触觉感知提供了一种有效的 工具,由于其快速性和有效性,该算法可在机器 人材质识别领域广泛应用。 ·792· 智 能 系 统 学 报 第 15 卷