正在加载图片...
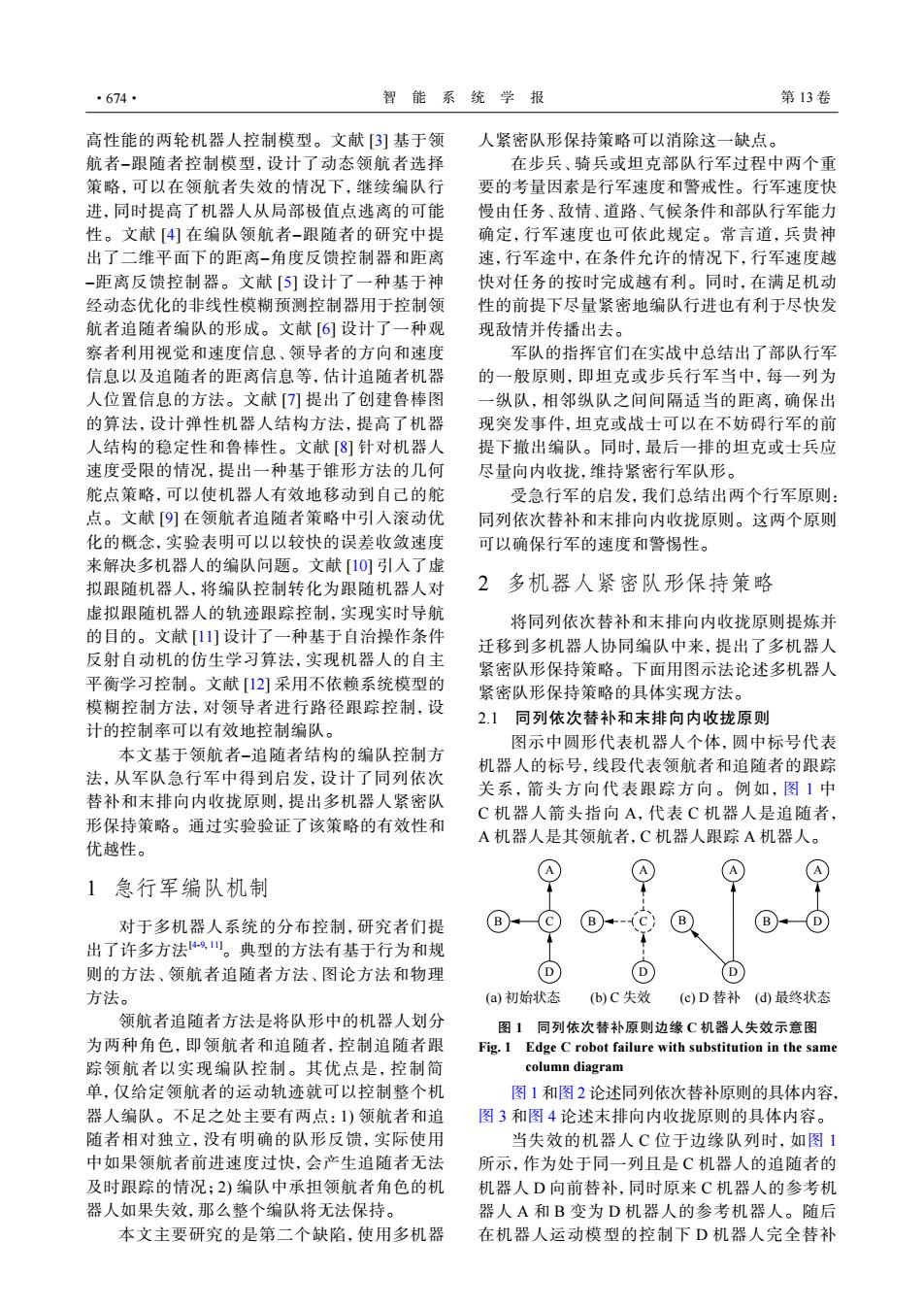
·674· 智能系统学报 第13卷 高性能的两轮机器人控制模型。文献3]基于领 人紧密队形保持策略可以消除这一缺点。 航者-跟随者控制模型,设计了动态领航者选择 在步兵、骑兵或坦克部队行军过程中两个重 策略,可以在领航者失效的情况下,继续编队行 要的考量因素是行军速度和警戒性。行军速度快 进,同时提高了机器人从局部极值点逃离的可能 慢由任务、敌情、道路、气候条件和部队行军能力 性。文献[4]在编队领航者-跟随者的研究中提 确定,行军速度也可依此规定。常言道,兵贵神 出了二维平面下的距离-角度反馈控制器和距离 速,行军途中,在条件允许的情况下,行军速度越 -距离反馈控制器。文献[5]设计了一种基于神 快对任务的按时完成越有利。同时,在满足机动 经动态优化的非线性模糊预测控制器用于控制领 性的前提下尽量紧密地编队行进也有利于尽快发 航者追随者编队的形成。文献[6]设计了一种观 现敌情并传播出去。 察者利用视觉和速度信息、领导者的方向和速度 军队的指挥官们在实战中总结出了部队行军 信息以及追随者的距离信息等,估计追随者机器 的一般原则,即坦克或步兵行军当中,每一列为 人位置信息的方法。文献[7]提出了创建鲁棒图 一纵队,相邻纵队之间间隔适当的距离,确保出 的算法,设计弹性机器人结构方法,提高了机器 现突发事件,坦克或战士可以在不妨碍行军的前 人结构的稳定性和鲁棒性。文献「8]针对机器人 提下撤出编队。同时,最后一排的坦克或士兵应 速度受限的情况,提出一种基于锥形方法的几何 尽量向内收拢,维持紧密行军队形。 舵点策略,可以使机器人有效地移动到自己的舵 受急行军的启发,我们总结出两个行军原则: 点。文献[9]在领航者追随者策略中引入滚动优 同列依次替补和末排向内收拢原则。这两个原则 化的概念,实验表明可以以较快的误差收敛速度 可以确保行军的速度和警惕性。 来解决多机器人的编队问题。文献[10]引入了虚 拟跟随机器人,将编队控制转化为跟随机器人对 2多机器人紧密队形保持策略 虚拟跟随机器人的轨迹跟踪控制,实现实时导航 将同列依次替补和末排向内收拢原则提炼并 的目的。文献[11]设计了一种基于自治操作条件 迁移到多机器人协同编队中来,提出了多机器人 反射自动机的仿生学习算法,实现机器人的自主 紧密队形保持策略。下面用图示法论述多机器人 平衡学习控制。文献[12]采用不依赖系统模型的 紧密队形保持策略的具体实现方法。 模糊控制方法,对领导者进行路径跟踪控制,设 2.1同列依次替补和末排向内收拢原则 计的控制率可以有效地控制编队。 图示中圆形代表机器人个体,圆中标号代表 本文基于领航者-追随者结构的编队控制方 机器人的标号,线段代表领航者和追随者的跟踪 法,从军队急行军中得到启发,设计了同列依次 关系,箭头方向代表跟踪方向。例如,图1中 替补和末排向内收拢原则,提出多机器人紧密队 C机器人箭头指向A,代表C机器人是追随者, 形保持策略。通过实验验证了该策略的有效性和 A机器人是其领航者,C机器人跟踪A机器人。 优越性。 1急行军编队机制 对于多机器人系统的分布控制,研究者们提 B 出了许多方法9川。典型的方法有基于行为和规 则的方法、领航者追随者方法、图论方法和物理 D D (D 方法。 (a)初始状态 (b)C失效 (c)D替补 (d)最终状态 领航者追随者方法是将队形中的机器人划分 图1同列依次替补原则边缘C机器人失效示意图 为两种角色,即领航者和追随者,控制追随者跟 Fig.1 Edge C robot failure with substitution in the same 踪领航者以实现编队控制。其优点是,控制简 column diagram 单,仅给定领航者的运动轨迹就可以控制整个机 图1和图2论述同列依次替补原则的具体内容, 器人编队。不足之处主要有两点:1)领航者和追 图3和图4论述末排向内收拢原则的具体内容。 随者相对独立,没有明确的队形反馈,实际使用 当失效的机器人C位于边缘队列时,如图1 中如果领航者前进速度过快,会产生追随者无法 所示,作为处于同一列且是C机器人的追随者的 及时跟踪的情况;2)编队中承担领航者角色的机 机器人D向前替补,同时原来C机器人的参考机 器人如果失效,那么整个编队将无法保持。 器人A和B变为D机器人的参考机器人。随后 本文主要研究的是第二个缺陷,使用多机器 在机器人运动模型的控制下D机器人完全替补高性能的两轮机器人控制模型。文献 [3] 基于领 航者–跟随者控制模型,设计了动态领航者选择 策略,可以在领航者失效的情况下,继续编队行 进,同时提高了机器人从局部极值点逃离的可能 性。文献 [4] 在编队领航者–跟随者的研究中提 出了二维平面下的距离–角度反馈控制器和距离 –距离反馈控制器。文献 [5] 设计了一种基于神 经动态优化的非线性模糊预测控制器用于控制领 航者追随者编队的形成。文献 [6] 设计了一种观 察者利用视觉和速度信息、领导者的方向和速度 信息以及追随者的距离信息等,估计追随者机器 人位置信息的方法。文献 [7] 提出了创建鲁棒图 的算法,设计弹性机器人结构方法,提高了机器 人结构的稳定性和鲁棒性。文献 [8] 针对机器人 速度受限的情况,提出一种基于锥形方法的几何 舵点策略,可以使机器人有效地移动到自己的舵 点。文献 [9] 在领航者追随者策略中引入滚动优 化的概念,实验表明可以以较快的误差收敛速度 来解决多机器人的编队问题。文献 [10] 引入了虚 拟跟随机器人,将编队控制转化为跟随机器人对 虚拟跟随机器人的轨迹跟踪控制,实现实时导航 的目的。文献 [11] 设计了一种基于自治操作条件 反射自动机的仿生学习算法,实现机器人的自主 平衡学习控制。文献 [12] 采用不依赖系统模型的 模糊控制方法,对领导者进行路径跟踪控制,设 计的控制率可以有效地控制编队。 本文基于领航者–追随者结构的编队控制方 法,从军队急行军中得到启发,设计了同列依次 替补和末排向内收拢原则,提出多机器人紧密队 形保持策略。通过实验验证了该策略的有效性和 优越性。 1 急行军编队机制 对于多机器人系统的分布控制,研究者们提 出了许多方法[4-9, 11]。典型的方法有基于行为和规 则的方法、领航者追随者方法、图论方法和物理 方法。 领航者追随者方法是将队形中的机器人划分 为两种角色,即领航者和追随者,控制追随者跟 踪领航者以实现编队控制。其优点是,控制简 单,仅给定领航者的运动轨迹就可以控制整个机 器人编队。不足之处主要有两点:1) 领航者和追 随者相对独立,没有明确的队形反馈,实际使用 中如果领航者前进速度过快,会产生追随者无法 及时跟踪的情况;2) 编队中承担领航者角色的机 器人如果失效,那么整个编队将无法保持。 本文主要研究的是第二个缺陷,使用多机器 人紧密队形保持策略可以消除这一缺点。 在步兵、骑兵或坦克部队行军过程中两个重 要的考量因素是行军速度和警戒性。行军速度快 慢由任务、敌情、道路、气候条件和部队行军能力 确定,行军速度也可依此规定。常言道,兵贵神 速,行军途中,在条件允许的情况下,行军速度越 快对任务的按时完成越有利。同时,在满足机动 性的前提下尽量紧密地编队行进也有利于尽快发 现敌情并传播出去。 军队的指挥官们在实战中总结出了部队行军 的一般原则,即坦克或步兵行军当中,每一列为 一纵队,相邻纵队之间间隔适当的距离,确保出 现突发事件,坦克或战士可以在不妨碍行军的前 提下撤出编队。同时,最后一排的坦克或士兵应 尽量向内收拢,维持紧密行军队形。 受急行军的启发,我们总结出两个行军原则: 同列依次替补和末排向内收拢原则。这两个原则 可以确保行军的速度和警惕性。 2 多机器人紧密队形保持策略 将同列依次替补和末排向内收拢原则提炼并 迁移到多机器人协同编队中来,提出了多机器人 紧密队形保持策略。下面用图示法论述多机器人 紧密队形保持策略的具体实现方法。 2.1 同列依次替补和末排向内收拢原则 图示中圆形代表机器人个体,圆中标号代表 机器人的标号,线段代表领航者和追随者的跟踪 关系,箭头方向代表跟踪方向。例如,图 1 中 C 机器人箭头指向 A,代表 C 机器人是追随者, A 机器人是其领航者,C 机器人跟踪 A 机器人。 B A C D B A C D B A D B A D (a) 初始状态 (b) C 失效 (c) D 替补 (d) 最终状态 图 1 同列依次替补原则边缘 C 机器人失效示意图 Fig. 1 Edge C robot failure with substitution in the same column diagram 图 1 和图 2 论述同列依次替补原则的具体内容, 图 3 和图 4 论述末排向内收拢原则的具体内容。 当失效的机器人 C 位于边缘队列时,如图 1 所示,作为处于同一列且是 C 机器人的追随者的 机器人 D 向前替补,同时原来 C 机器人的参考机 器人 A 和 B 变为 D 机器人的参考机器人。随后 在机器人运动模型的控制下 D 机器人完全替补 ·674· 智 能 系 统 学 报 第 13 卷