正在加载图片...
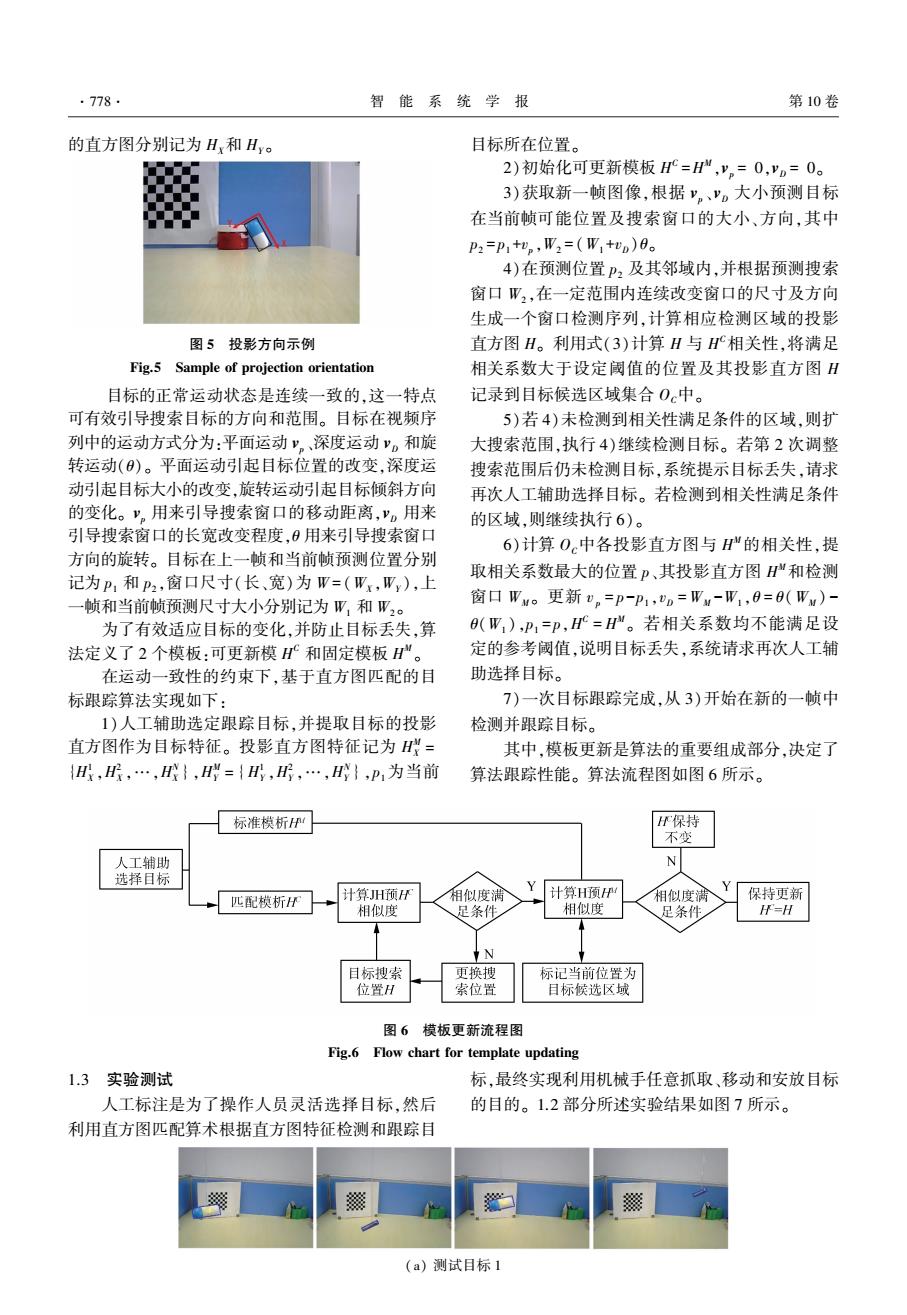
·778 智能系统学报 第10卷 的直方图分别记为H,和Hy 目标所在位置。 2)初始化可更新模板H=H",",=0,vp=0。 3)获取新一帧图像,根据"。、"。大小预测目标 在当前帧可能位置及搜索窗口的大小、方向,其中 P2=P1+,W2=(W1+eo)0。 4)在预测位置P2及其邻域内,并根据预测搜索 窗口W2,在一定范围内连续改变窗口的尺寸及方向 生成一个窗口检测序列,计算相应检测区域的投影 图5投影方向示例 直方图H。利用式(3)计算H与H相关性,将满足 Fig.5 Sample of projection orientation 相关系数大于设定阈值的位置及其投影直方图H 目标的正常运动状态是连续一致的,这一特点 记录到目标候选区域集合O中。 可有效引导搜索目标的方向和范围。目标在视频序 5)若4)未检测到相关性满足条件的区域,则扩 列中的运动方式分为:平面运动y。、深度运动"。和旋 大搜索范围,执行4)继续检测目标。若第2次调整 转运动()。平面运动引起目标位置的改变,深度运 搜索范围后仍未检测目标,系统提示目标丢失,请求 动引起目标大小的改变,旋转运动引起目标倾斜方向 再次人工辅助选择目标。若检测到相关性满足条件 的变化。y。用来引导搜索窗口的移动距离,'。用来 的区域,则继续执行6)。 引导搜索窗口的长宽改变程度,0用来引导搜索窗口 6)计算0中各投影直方图与H"的相关性,提 方向的旋转。目标在上一帧和当前帧预测位置分别 记为P,和P2,窗口尺寸(长、宽)为W=(Wx,Wy),上 取相关系数最大的位置P、其投影直方图H和检测 帧和当前帧预测尺寸大小分别记为W,和W2。 窗口WM。更新U,=p-P1,p=WM-W1,8=(Ww)- 为了有效适应目标的变化,并防止目标丢失,算 (W),P1=P,=H。若相关系数均不能满足设 法定义了2个模板:可更新模H和固定模板H。 定的参考阈值,说明目标丢失,系统请求再次人工辅 在运动一致性的约束下,基于直方图匹配的目 助选择目标。 标跟踪算法实现如下: 7)一次目标跟踪完成,从3)开始在新的一帧中 1)人工辅助选定跟踪目标,并提取目标的投影 检测并跟踪目标。 直方图作为目标特征。投影直方图特征记为H= 其中,模板更新是算法的重要组成部分,决定了 H以,,…,H},={,,…,},P为当前 算法跟踪性能。算法流程图如图6所示。 标准模析P 保持 不变 人工辅助 N 选择日标 计算H预W Y 相似度满 计算H预丹 匹配模析什 相似度满 保持更新 相似度 足条件 相似度 足条件 H=H N 目标搜索 更换搜 标记当前位置为 位置H 索位置 目标候选区域 图6 模板更新流程图 Fig.6 Flow chart for template updating 1.3实验测试 标,最终实现利用机械手任意抓取、移动和安放目标 人工标注是为了操作人员灵活选择目标,然后 的目的。1.2部分所述实验结果如图7所示。 利用直方图匹配算术根据直方图特征检测和跟踪目 (a)测试目标1的直方图分别记为 HX和 HY 。 图 5 投影方向示例 Fig.5 Sample of projection orientation 目标的正常运动状态是连续一致的,这一特点 可有效引导搜索目标的方向和范围。 目标在视频序 列中的运动方式分为:平面运动 vp、深度运动 vD 和旋 转运动(θ)。 平面运动引起目标位置的改变,深度运 动引起目标大小的改变,旋转运动引起目标倾斜方向 的变化。 vp 用来引导搜索窗口的移动距离,vD 用来 引导搜索窗口的长宽改变程度,θ 用来引导搜索窗口 方向的旋转。 目标在上一帧和当前帧预测位置分别 记为 p1 和 p2 ,窗口尺寸(长、宽)为 W = (WX,WY ),上 一帧和当前帧预测尺寸大小分别记为 W1 和 W2 。 为了有效适应目标的变化,并防止目标丢失,算 法定义了 2 个模板:可更新模 H C 和固定模板 H M 。 在运动一致性的约束下,基于直方图匹配的目 标跟踪算法实现如下: 1)人工辅助选定跟踪目标,并提取目标的投影 直方图作为目标特征。 投影直方图特征记为 H M X = {H 1 X ,H 2 X ,…,H N X } ,H M Y = {H 1 Y ,H 2 Y ,…,H N Y } ,p1为当前 目标所在位置。 2)初始化可更新模板 H C =H M ,vp = 0,vD = 0。 3)获取新一帧图像,根据 vp、vD 大小预测目标 在当前帧可能位置及搜索窗口的大小、方向,其中 p2 = p1 +vp,W2 = (W1 +vD)θ。 4)在预测位置 p2 及其邻域内,并根据预测搜索 窗口 W2 ,在一定范围内连续改变窗口的尺寸及方向 生成一个窗口检测序列,计算相应检测区域的投影 直方图 H。 利用式(3)计算 H 与 H C相关性,将满足 相关系数大于设定阈值的位置及其投影直方图 H 记录到目标候选区域集合 OC中。 5)若 4)未检测到相关性满足条件的区域,则扩 大搜索范围,执行 4)继续检测目标。 若第 2 次调整 搜索范围后仍未检测目标,系统提示目标丢失,请求 再次人工辅助选择目标。 若检测到相关性满足条件 的区域,则继续执行 6)。 6)计算 OC中各投影直方图与 H M的相关性,提 取相关系数最大的位置 p、其投影直方图 H M和检测 窗口 WM 。 更新 v p = p-p1 ,vD = WM -W1 ,θ = θ(WM ) - θ(W1 ),p1 = p,H C = H M 。 若相关系数均不能满足设 定的参考阈值,说明目标丢失,系统请求再次人工辅 助选择目标。 7)一次目标跟踪完成,从 3)开始在新的一帧中 检测并跟踪目标。 其中,模板更新是算法的重要组成部分,决定了 算法跟踪性能。 算法流程图如图 6 所示。 图 6 模板更新流程图 Fig.6 Flow chart for template updating 1.3 实验测试 人工标注是为了操作人员灵活选择目标,然后 利用直方图匹配算术根据直方图特征检测和跟踪目 标,最终实现利用机械手任意抓取、移动和安放目标 的目的。 1.2 部分所述实验结果如图 7 所示。 (a) 测试目标 1 ·778· 智 能 系 统 学 报 第 10 卷