正在加载图片...
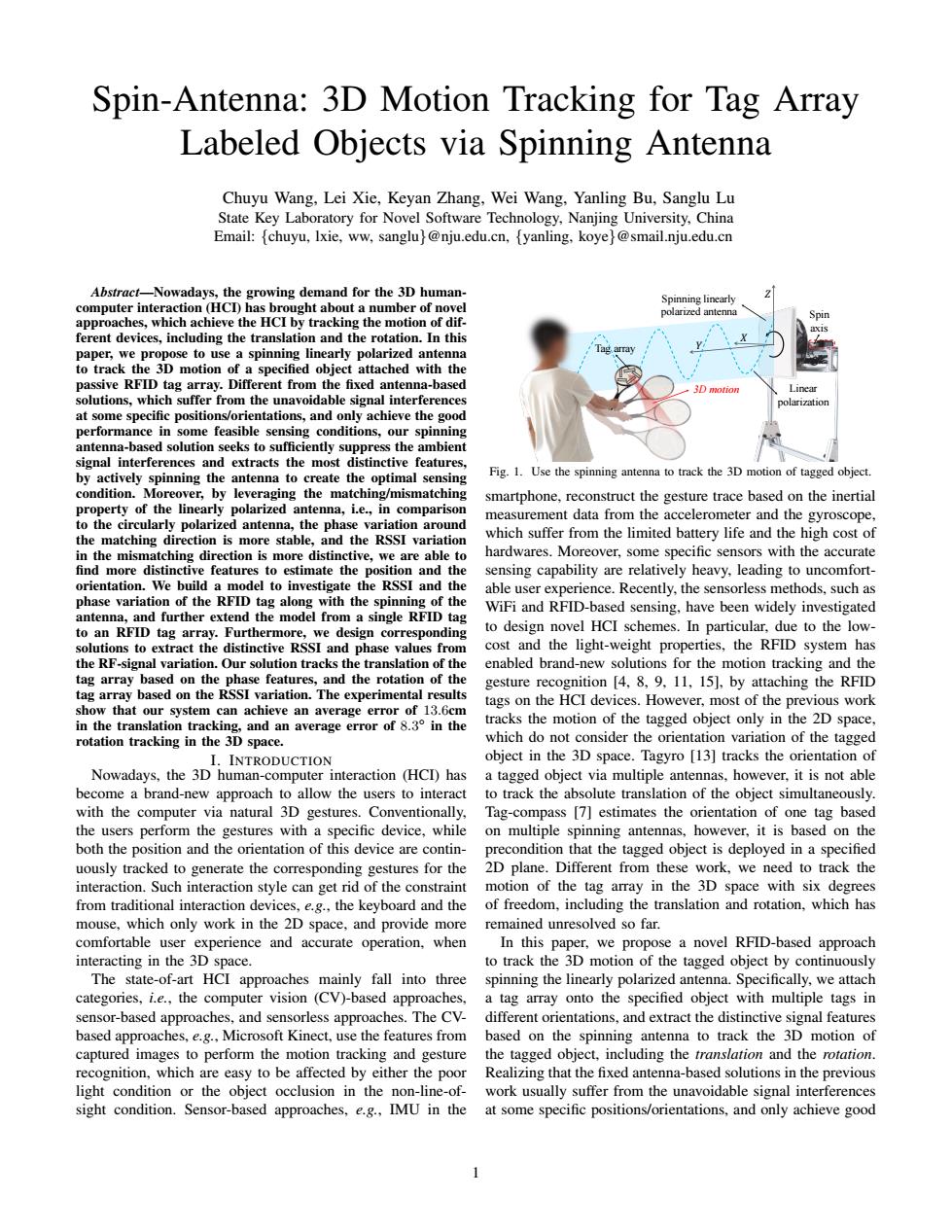
Spin-Antenna:3D Motion Tracking for Tag Array Labeled Objects via Spinning Antenna Chuyu Wang,Lei Xie,Keyan Zhang,Wei Wang,Yanling Bu,Sanglu Lu State Key Laboratory for Novel Software Technology,Nanjing University,China Email:{chuyu,Ixie,ww,sanglu}@nju.edu.cn,{yanling,koye@smail.nju.edu.cn Abstract-Nowadays,the growing demand for the 3D human- computer interaction(HCD has brought about a number of novel Spinning linearly polarized antenna approaches,which achieve the HCI by tracking the motion of dif- ferent devices,including the translation and the rotation.In this paper,we propose to use a spinning linearly polarized antenna to track the 3D motion of a specified object attached with the passive RFID tag array.Different from the fixed antenna-based 3D motion Linear solutions,which suffer from the unavoidable signal interferences polarization at some specific positions/orientations,and only achieve the good performance in some feasible sensing conditions,our spinning antenna-based solution seeks to sufficiently suppress the ambient signal interferences and extracts the most distinctive features, by actively spinning the antenna to create the optimal sensing Fig.1.Use the spinning antenna to track the 3D motion of tagged object. condition.Moreover,by leveraging the matching/mismatching smartphone,reconstruct the gesture trace based on the inertial property of the linearly polarized antenna,i.e.,in comparison measurement data from the accelerometer and the gyroscope, to the circularly polarized antenna,the phase variation around the matching direction is more stable,and the RSSI variation which suffer from the limited battery life and the high cost of in the mismatching direction is more distinctive,we are able to hardwares.Moreover,some specific sensors with the accurate find more distinctive features to estimate the position and the sensing capability are relatively heavy,leading to uncomfort- orientation.We build a model to investigate the RSSI and the able user experience.Recently,the sensorless methods,such as phase variation of the RFID tag along with the spinning of the WiFi and RFID-based sensing,have been widely investigated antenna,and further extend the model from a single RFID tag to an RFID tag array.Furthermore,we design corresponding to design novel HCI schemes.In particular,due to the low- solutions to extract the distinctive RSSI and phase values from cost and the light-weight properties,the RFID system has the RF-signal variation.Our solution tracks the translation of the enabled brand-new solutions for the motion tracking and the tag array based on the phase features,and the rotation of the gesture recognition [4.8,9,11,15],by attaching the RFID tag array based on the RSSI variation.The experimental results tags on the HCI devices.However,most of the previous work show that our system can achieve an average error of 13.6cm in the translation tracking,and an average error of 8.3 in the tracks the motion of the tagged object only in the 2D space rotation tracking in the 3D space which do not consider the orientation variation of the tagged I.INTRODUCTION object in the 3D space.Tagyro [13]tracks the orientation of Nowadays,the 3D human-computer interaction (HCl)has a tagged object via multiple antennas.however.it is not able become a brand-new approach to allow the users to interact to track the absolute translation of the object simultaneously. with the computer via natural 3D gestures.Conventionally, Tag-compass [7]estimates the orientation of one tag based the users perform the gestures with a specific device,while on multiple spinning antennas,however,it is based on the both the position and the orientation of this device are contin- precondition that the tagged object is deployed in a specified uously tracked to generate the corresponding gestures for the 2D plane.Different from these work,we need to track the interaction.Such interaction style can get rid of the constraint motion of the tag array in the 3D space with six degrees from traditional interaction devices,e.g.,the keyboard and the of freedom,including the translation and rotation,which has mouse,which only work in the 2D space,and provide more remained unresolved so far. comfortable user experience and accurate operation,when In this paper,we propose a novel RFID-based approach interacting in the 3D space. to track the 3D motion of the tagged object by continuously The state-of-art HCI approaches mainly fall into three spinning the linearly polarized antenna.Specifically,we attach categories,i.e.,the computer vision (CV)-based approaches, a tag array onto the specified object with multiple tags in sensor-based approaches,and sensorless approaches.The CV-different orientations,and extract the distinctive signal features based approaches,e.g.,Microsoft Kinect,use the features from based on the spinning antenna to track the 3D motion of captured images to perform the motion tracking and gesture the tagged object,including the translation and the rotation. recognition,which are easy to be affected by either the poor Realizing that the fixed antenna-based solutions in the previous light condition or the object occlusion in the non-line-of- work usually suffer from the unavoidable signal interferences sight condition.Sensor-based approaches,e.g.,IMU in the at some specific positions/orientations,and only achieve goodSpin-Antenna: 3D Motion Tracking for Tag Array Labeled Objects via Spinning Antenna Chuyu Wang, Lei Xie, Keyan Zhang, Wei Wang, Yanling Bu, Sanglu Lu State Key Laboratory for Novel Software Technology, Nanjing University, China Email: {chuyu, lxie, ww, sanglu}@nju.edu.cn, {yanling, koye}@smail.nju.edu.cn Abstract—Nowadays, the growing demand for the 3D humancomputer interaction (HCI) has brought about a number of novel approaches, which achieve the HCI by tracking the motion of different devices, including the translation and the rotation. In this paper, we propose to use a spinning linearly polarized antenna to track the 3D motion of a specified object attached with the passive RFID tag array. Different from the fixed antenna-based solutions, which suffer from the unavoidable signal interferences at some specific positions/orientations, and only achieve the good performance in some feasible sensing conditions, our spinning antenna-based solution seeks to sufficiently suppress the ambient signal interferences and extracts the most distinctive features, by actively spinning the antenna to create the optimal sensing condition. Moreover, by leveraging the matching/mismatching property of the linearly polarized antenna, i.e., in comparison to the circularly polarized antenna, the phase variation around the matching direction is more stable, and the RSSI variation in the mismatching direction is more distinctive, we are able to find more distinctive features to estimate the position and the orientation. We build a model to investigate the RSSI and the phase variation of the RFID tag along with the spinning of the antenna, and further extend the model from a single RFID tag to an RFID tag array. Furthermore, we design corresponding solutions to extract the distinctive RSSI and phase values from the RF-signal variation. Our solution tracks the translation of the tag array based on the phase features, and the rotation of the tag array based on the RSSI variation. The experimental results show that our system can achieve an average error of 13.6cm in the translation tracking, and an average error of 8.3 ◦ in the rotation tracking in the 3D space. I. INTRODUCTION Nowadays, the 3D human-computer interaction (HCI) has become a brand-new approach to allow the users to interact with the computer via natural 3D gestures. Conventionally, the users perform the gestures with a specific device, while both the position and the orientation of this device are continuously tracked to generate the corresponding gestures for the interaction. Such interaction style can get rid of the constraint from traditional interaction devices, e.g., the keyboard and the mouse, which only work in the 2D space, and provide more comfortable user experience and accurate operation, when interacting in the 3D space. The state-of-art HCI approaches mainly fall into three categories, i.e., the computer vision (CV)-based approaches, sensor-based approaches, and sensorless approaches. The CVbased approaches, e.g., Microsoft Kinect, use the features from captured images to perform the motion tracking and gesture recognition, which are easy to be affected by either the poor light condition or the object occlusion in the non-line-ofsight condition. Sensor-based approaches, e.g., IMU in the ! Spin axis Linear polarization Spinning linearly polarized antenna 3D motion Tag array " # Fig. 1. Use the spinning antenna to track the 3D motion of tagged object. smartphone, reconstruct the gesture trace based on the inertial measurement data from the accelerometer and the gyroscope, which suffer from the limited battery life and the high cost of hardwares. Moreover, some specific sensors with the accurate sensing capability are relatively heavy, leading to uncomfortable user experience. Recently, the sensorless methods, such as WiFi and RFID-based sensing, have been widely investigated to design novel HCI schemes. In particular, due to the lowcost and the light-weight properties, the RFID system has enabled brand-new solutions for the motion tracking and the gesture recognition [4, 8, 9, 11, 15], by attaching the RFID tags on the HCI devices. However, most of the previous work tracks the motion of the tagged object only in the 2D space, which do not consider the orientation variation of the tagged object in the 3D space. Tagyro [13] tracks the orientation of a tagged object via multiple antennas, however, it is not able to track the absolute translation of the object simultaneously. Tag-compass [7] estimates the orientation of one tag based on multiple spinning antennas, however, it is based on the precondition that the tagged object is deployed in a specified 2D plane. Different from these work, we need to track the motion of the tag array in the 3D space with six degrees of freedom, including the translation and rotation, which has remained unresolved so far. In this paper, we propose a novel RFID-based approach to track the 3D motion of the tagged object by continuously spinning the linearly polarized antenna. Specifically, we attach a tag array onto the specified object with multiple tags in different orientations, and extract the distinctive signal features based on the spinning antenna to track the 3D motion of the tagged object, including the translation and the rotation. Realizing that the fixed antenna-based solutions in the previous work usually suffer from the unavoidable signal interferences at some specific positions/orientations, and only achieve good 1