正在加载图片...
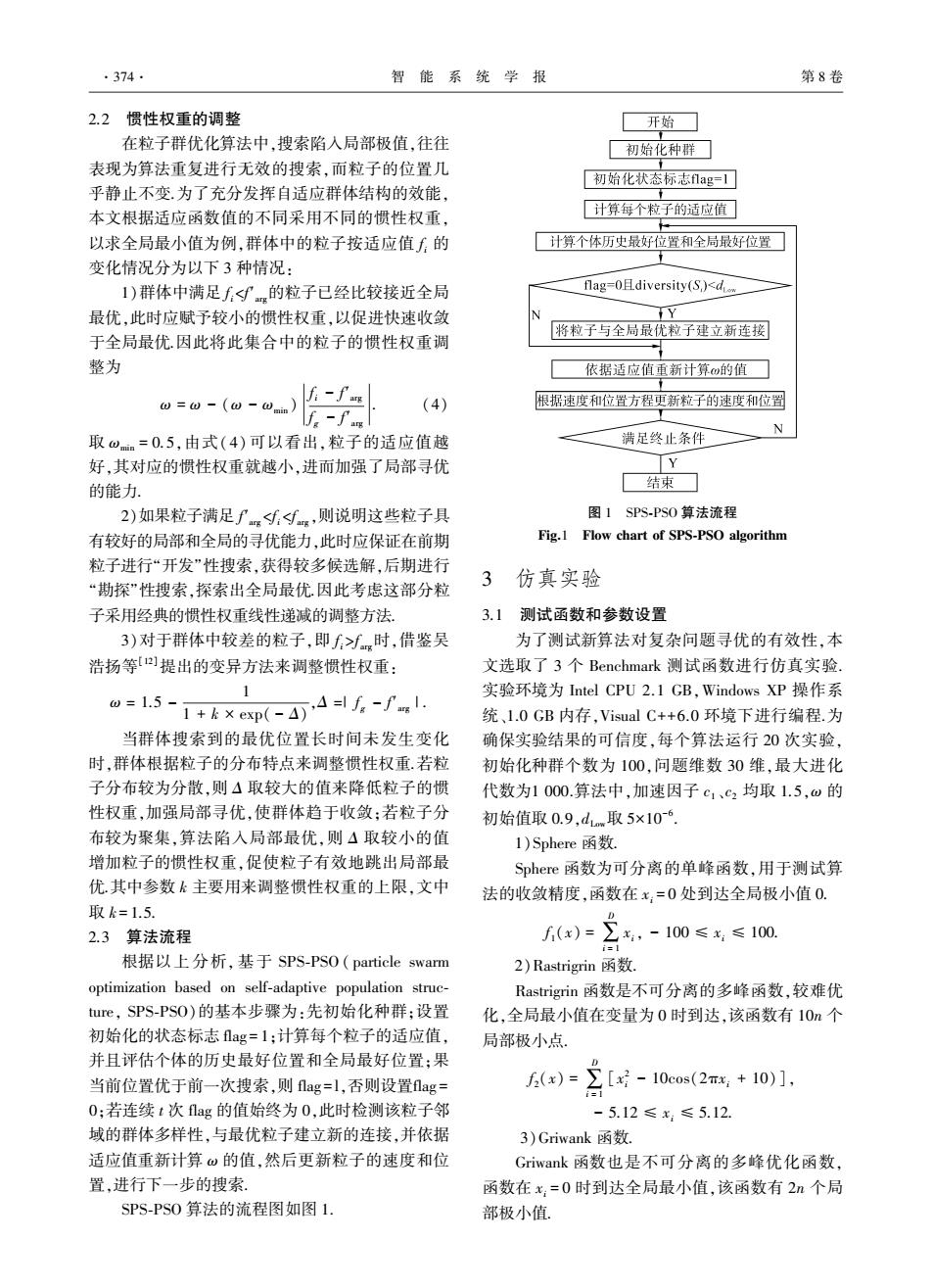
·374. 智能系统学报 第8卷 2.2惯性权重的调整 开始 在粒子群优化算法中,搜索陷入局部极值,往往 初始化种群☐ 表现为算法重复进行无效的搜索,而粒子的位置几 初始化状态标志1ag=1 乎静止不变.为了充分发挥自适应群体结构的效能, 本文根据适应函数值的不同采用不同的惯性权重, 计算每个粒子的适应值 以求全局最小值为例,群体中的粒子按适应值f的 计算个体历史最好位置和全局最好位置 变化情况分为以下3种情况: 1)群体中满足f∫的粒子已经比较接近全局 flag=0Ediversity(S.)<d 最优,此时应赋予较小的惯性权重,以促进快速收敛 Y 将粒子与全局最优粒子建立新连接 于全局最优.因此将此集合中的粒子的惯性权重调 整为 依据适应值重新计算的值。 =w-(w-w (4) 根据速度和位置方程更新粒子的速度和位置 取ωm=0.5,由式(4)可以看出,粒子的适应值越 满足终止条件 好,其对应的惯性权重就越小,进而加强了局部寻优 Y 的能力. 结束☐ 2)如果粒子满足∫寸f,则说明这些粒子具 图1SPS-PS0算法流程 有较好的局部和全局的寻优能力,此时应保证在前期 Fig.1 Flow chart of SPS-PSO algorithm 粒子进行“开发”性搜索,获得较多候选解,后期进行 3 “勘探”性搜索,探索出全局最优因此考虑这部分粒 仿真实验 子采用经典的惯性权重线性递减的调整方法 3.1测试函数和参数设置 3)对于群体中较差的粒子,即f>f时,借鉴吴 为了测试新算法对复杂问题寻优的有效性,本 浩扬等]提出的变异方法来调整惯性权重: 文选取了3个Benchmark测试函数进行仿真实验. 1 实验环境为Intel CPU2.1GB,Windows XP操作系 =1.5-1+kxexp( 统、1.0GB内存,Visual C++6.0环境下进行编程.为 当群体搜索到的最优位置长时间未发生变化 确保实验结果的可信度,每个算法运行20次实验, 时,群体根据粒子的分布特点来调整惯性权重.若粒 初始化种群个数为100,问题维数30维,最大进化 子分布较为分散,则△取较大的值来降低粒子的惯 代数为1000.算法中,加速因子c1、2均取1.5,w的 性权重,加强局部寻优,使群体趋于收敛:若粒子分 初始值取0.9,d取5×10-6. 布较为聚集,算法陷入局部最优,则△取较小的值 I)Sphere函数. 增加粒子的惯性权重,促使粒子有效地跳出局部最 Sphere函数为可分离的单峰函数,用于测试算 优.其中参数k主要用来调整惯性权重的上限,文中 法的收敛精度,函数在x,=0处到达全局极小值0 取k=1.5. 2.3算法流程 ()=2,-100≤≤10 根据以上分析,基于SPS-PSO(particle swarm 2)Rastrigrin函数. optimization based on self-adaptive population struc- Rastrigrin函数是不可分离的多峰函数,较难优 ture,SPS-PSO)的基本步骤为:先初始化种群:设置 化,全局最小值在变量为0时到达,该函数有10n个 初始化的状态标志lag=1:计算每个粒子的适应值, 局部极小点 并且评估个体的历史最好位置和全局最好位置:果 当前位置优于前一次搜索,则lag=l,否则设置lag= f5(x)=∑[x-10c0s(2mx:+10)], 0:若连续t次f1ag的值始终为0,此时检测该粒子邻 -5.12≤x:≤5.12. 域的群体多样性,与最优粒子建立新的连接,并依据 3)Griwank函数. 适应值重新计算ω的值,然后更新粒子的速度和位 Griwank函数也是不可分离的多峰优化函数, 置,进行下一步的搜索 函数在x:=0时到达全局最小值,该函数有2n个局 SPS-PS0算法的流程图如图1. 部极小值.2.2 惯性权重的调整 在粒子群优化算法中,搜索陷入局部极值,往往 表现为算法重复进行无效的搜索,而粒子的位置几 乎静止不变.为了充分发挥自适应群体结构的效能, 本文根据适应函数值的不同采用不同的惯性权重, 以求全局最小值为例,群体中的粒子按适应值 f i 的 变化情况分为以下 3 种情况: 1)群体中满足 f i<f′arg的粒子已经比较接近全局 最优,此时应赋予较小的惯性权重,以促进快速收敛 于全局最优.因此将此集合中的粒子的惯性权重调 整为 ω = ω - (ω - ωmin ) f i - f′arg f g - f′arg . (4) 取 ωmin = 0.5,由式(4) 可以看出,粒子的适应值越 好,其对应的惯性权重就越小,进而加强了局部寻优 的能力. 2)如果粒子满足 f′arg <f i <f arg,则说明这些粒子具 有较好的局部和全局的寻优能力,此时应保证在前期 粒子进行“开发”性搜索,获得较多候选解,后期进行 “勘探”性搜索,探索出全局最优.因此考虑这部分粒 子采用经典的惯性权重线性递减的调整方法. 3)对于群体中较差的粒子,即 f i >f arg时,借鉴吴 浩扬等[12]提出的变异方法来调整惯性权重: ω = 1.5 - 1 1 + k × exp( - Δ) ,Δ =| f g - f′arg | . 当群体搜索到的最优位置长时间未发生变化 时,群体根据粒子的分布特点来调整惯性权重.若粒 子分布较为分散,则 Δ 取较大的值来降低粒子的惯 性权重,加强局部寻优,使群体趋于收敛;若粒子分 布较为聚集,算法陷入局部最优,则 Δ 取较小的值 增加粒子的惯性权重,促使粒子有效地跳出局部最 优.其中参数 k 主要用来调整惯性权重的上限,文中 取 k = 1.5. 2.3 算法流程 根据以上分析,基于 SPS⁃PSO ( particle swarm optimization based on self⁃adaptive population struc⁃ ture, SPS⁃PSO)的基本步骤为:先初始化种群;设置 初始化的状态标志 flag = 1;计算每个粒子的适应值, 并且评估个体的历史最好位置和全局最好位置;果 当前位置优于前一次搜索,则 flag = l,否则设置flag = 0;若连续 t 次 flag 的值始终为 0,此时检测该粒子邻 域的群体多样性,与最优粒子建立新的连接,并依据 适应值重新计算 ω 的值,然后更新粒子的速度和位 置,进行下一步的搜索. SPS⁃PSO 算法的流程图如图 1. 图 1 SPS⁃PSO 算法流程 Fig.1 Flow chart of SPS⁃PSO algorithm 3 仿真实验 3.1 测试函数和参数设置 为了测试新算法对复杂问题寻优的有效性,本 文选取了 3 个 Benchmark 测试函数进行仿真实验. 实验环境为 Intel CPU 2.1 GB,Windows XP 操作系 统、1.0 GB 内存,Visual C++6.0 环境下进行编程.为 确保实验结果的可信度,每个算法运行 20 次实验, 初始化种群个数为 100,问题维数 30 维,最大进化 代数为1 000.算法中,加速因子 c1 、c2 均取 1.5,ω 的 初始值取 0.9,dLow取 5×10 -6 . 1)Sphere 函数. Sphere 函数为可分离的单峰函数,用于测试算 法的收敛精度,函数在 xi = 0 处到达全局极小值 0. f 1(x) = ∑ D i = 1 xi, - 100 ≤ xi ≤ 100. 2)Rastrigrin 函数. Rastrigrin 函数是不可分离的多峰函数,较难优 化,全局最小值在变量为 0 时到达,该函数有 10n 个 局部极小点. f 2(x) = ∑ D i = 1 [x 2 i - 10cos(2πxi + 10)], - 5.12 ≤ xi ≤ 5.12. 3)Griwank 函数. Griwank 函数也是不可分离的多峰优化函数, 函数在 xi = 0 时到达全局最小值,该函数有 2n 个局 部极小值. ·374· 智 能 系 统 学 报 第 8 卷