正在加载图片...
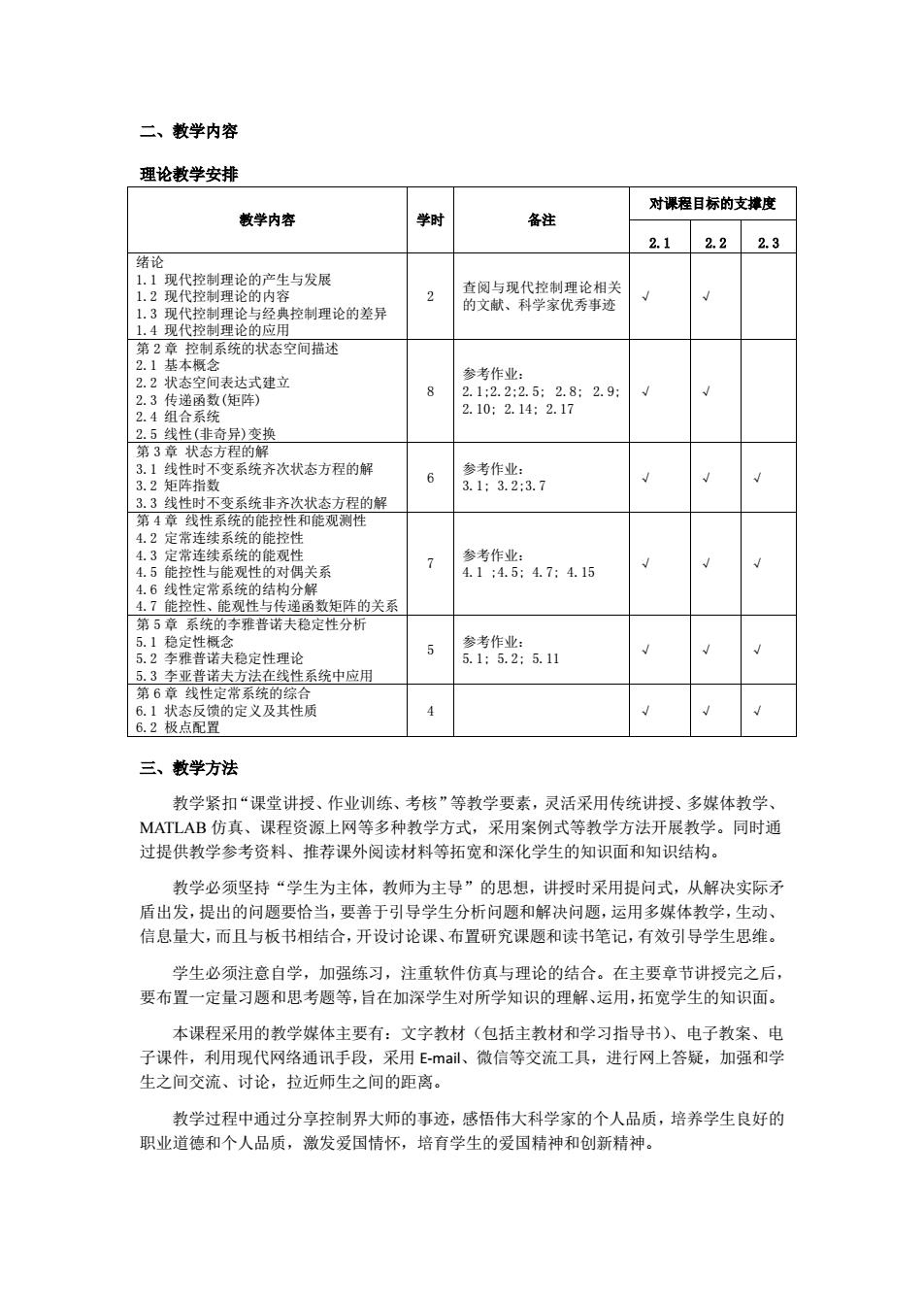
二、教学内容 理论教学安排 对课程日标的支撑度 教学内容 学时 备注 2.12.223 】现代控制理论的产生与发展 代产理论经拉制理论的差异 2 22状态 间问表达式建立 2222;2.8:29 2.10:2.14:2.17 25线性(奇)变换 3.1线性 6 不变系统非齐次状态方程的解 7 参考作:4:45 5 参考作些:1 系统中应用 投的定其 三、教学方法 教学紧扣“课堂讲授、作业训练、考核”竿教学要素,灵活采用传统讲授、多媒体教学 MATLAB仿真 ,采用案例式等教学方法开展教学。 同时通 过保教学多考程资等生宽和深化学生的如面和如识结的 教学必须坚持“学生为主体,教师为主导”的思想,讲授时采用提问式,从解决实际矛 盾出发,提出的问题要恰当,要善于引导学生分析问题和解决问题,运用多媒体教学,生动、 信息量大,而且与板书相结合,开设讨论课、布置研究课题和读书笔记,有效引导学生思维。 学生必须注意自学,加强练习,注重软件仿真与理论的结合。在主要章节讲授完之后 要布置一定量习愿和思考题等,旨在加深学生对所学知识的理解、运用,拓宽学生的知识面。 本课程采用的教学媒体主要有:文字教材(包括主教材和学习指导书、电子教案、电 子课件,利用现代网络通讯手段,采用Emal、微信等交流工具,进行网上答疑,加强和学 生之间交流、讨论,拉近师生之间的距离。 教学过程中通过分享控制界大师的事迹,感悟伟大科学家的个人品质,培养学生良好的 职业道德和个人品质,激发爱国情怀,培育学生的爱国精神和创新精神。 二、教学内容 理论教学安排 教学内容 学时 备注 对课程目标的支撑度 2.1 2.2 2.3 绪论 1.1 现代控制理论的产生与发展 1.2 现代控制理论的内容 1.3 现代控制理论与经典控制理论的差异 1.4 现代控制理论的应用 2 查阅与现代控制理论相关 的文献、科学家优秀事迹 √ √ 第 2 章 控制系统的状态空间描述 2.1 基本概念 2.2 状态空间表达式建立 2.3 传递函数(矩阵) 2.4 组合系统 2.5 线性(非奇异)变换 8 参考作业: 2.1;2.2;2.5; 2.8; 2.9; 2.10; 2.14; 2.17 √ √ 第 3 章 状态方程的解 3.1 线性时不变系统齐次状态方程的解 3.2 矩阵指数 3.3 线性时不变系统非齐次状态方程的解 6 参考作业: 3.1; 3.2;3.7 √ √ √ 第 4 章 线性系统的能控性和能观测性 4.2 定常连续系统的能控性 4.3 定常连续系统的能观性 4.5 能控性与能观性的对偶关系 4.6 线性定常系统的结构分解 4.7 能控性、能观性与传递函数矩阵的关系 7 参考作业: 4.1 ;4.5; 4.7; 4.15 √ √ √ 第 5 章 系统的李雅普诺夫稳定性分析 5.1 稳定性概念 5.2 李雅普诺夫稳定性理论 5.3 李亚普诺夫方法在线性系统中应用 5 参考作业: 5.1; 5.2; 5.11 √ √ √ 第 6 章 线性定常系统的综合 6.1 状态反馈的定义及其性质 6.2 极点配置 4 √ √ √ 三、教学方法 教学紧扣“课堂讲授、作业训练、考核”等教学要素,灵活采用传统讲授、多媒体教学、 MATLAB 仿真、课程资源上网等多种教学方式,采用案例式等教学方法开展教学。同时通 过提供教学参考资料、推荐课外阅读材料等拓宽和深化学生的知识面和知识结构。 教学必须坚持“学生为主体,教师为主导”的思想,讲授时采用提问式,从解决实际矛 盾出发,提出的问题要恰当,要善于引导学生分析问题和解决问题,运用多媒体教学,生动、 信息量大,而且与板书相结合,开设讨论课、布置研究课题和读书笔记,有效引导学生思维。 学生必须注意自学,加强练习,注重软件仿真与理论的结合。在主要章节讲授完之后, 要布置一定量习题和思考题等,旨在加深学生对所学知识的理解、运用,拓宽学生的知识面。 本课程采用的教学媒体主要有:文字教材(包括主教材和学习指导书)、电子教案、电 子课件,利用现代网络通讯手段,采用 E-mail、微信等交流工具,进行网上答疑,加强和学 生之间交流、讨论,拉近师生之间的距离。 教学过程中通过分享控制界大师的事迹,感悟伟大科学家的个人品质,培养学生良好的 职业道德和个人品质,激发爱国情怀,培育学生的爱国精神和创新精神