正在加载图片...
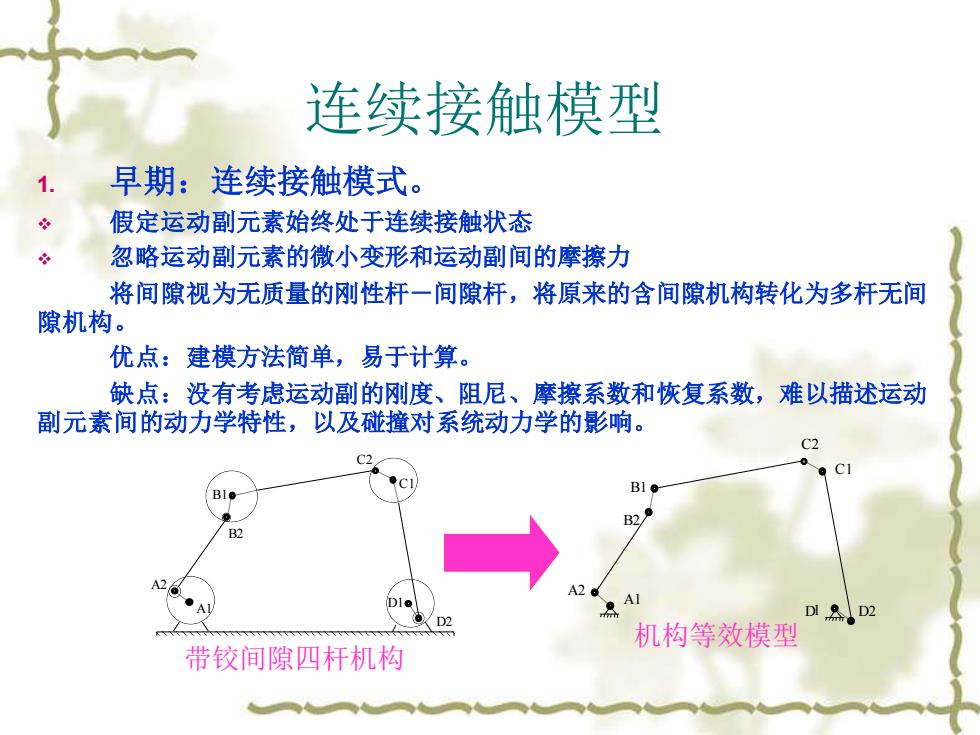
连续接触模型 早期:连续接触模式。 假定运动副元素始终处于连续接触状态 忽略运动副元素的微小变形和运动副间的摩擦力 将间隙视为无质量的刚性杆一间隙杆,将原来的含间隙机构转化为多杆无间 隙机构。 优点:建模方法简单,易于计算。 缺点:没有考虑运动副的刚度、阻尼、摩擦系数和恢复系数,难以描述运动 副元素间的动力学特性,以及碰撞对系统动力学的影响。 C2 C2 D2 DI D2 机构等效模型 带铰间隙四杆机构连续接触模型 1. 早期:连续接触模式。 ❖ 假定运动副元素始终处于连续接触状态 ❖ 忽略运动副元素的微小变形和运动副间的摩擦力 将间隙视为无质量的刚性杆-间隙杆,将原来的含间隙机构转化为多杆无间 隙机构。 优点:建模方法简单,易于计算。 缺点:没有考虑运动副的刚度、阻尼、摩擦系数和恢复系数,难以描述运动 副元素间的动力学特性,以及碰撞对系统动力学的影响。 A1 A2 B1 B2 C1 C2 D2 D1 A1 A2 B1 B2 C1 C2 D1 D2 带铰间隙四杆机构 机构等效模型