正在加载图片...
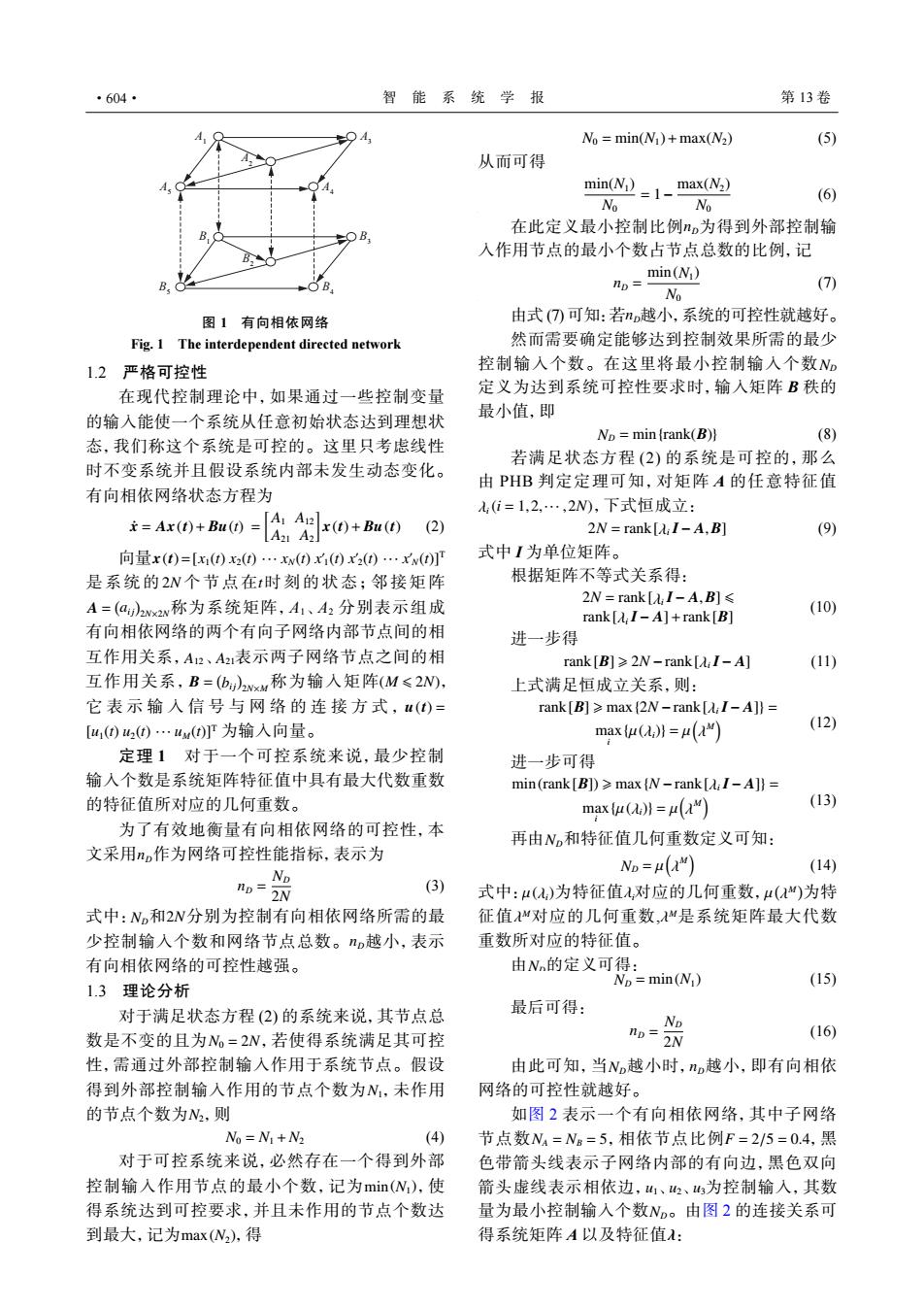
·604· 智能系统学报 第13卷 No min(N)+max(N2) (5) 从而可得 min(N)=1-max(N2) (6) No No 在此定义最小控制比例no为得到外部控制输 入作用节点的最小个数占节点总数的比例,记 min(N) nD = (7) No 图1有向相依网络 由式(⑦)可知:若o越小,系统的可控性就越好。 Fig.1 The interdependent directed network 然而需要确定能够达到控制效果所需的最少 1.2严格可控性 控制输入个数。在这里将最小控制输入个数Wo 在现代控制理论中,如果通过一些控制变量 定义为达到系统可控性要求时,输入矩阵B秩的 的输入能使一个系统从任意初始状态达到理想状 最小值,即 No=min (rank(B)) (8) 态,我们称这个系统是可控的。这里只考虑线性 时不变系统并且假设系统内部未发生动态变化。 若满足状态方程(2)的系统是可控的,那么 由PHB判定定理可知,对矩阵A的任意特征值 有向相依网络状态方程为 (i=1,2,…,2W,下式恒成立: 主=A0+Ba0=Ar0+Ba0 (2) 2N=rank[λI-A,B] (9) 向量x(t)=[x()x2()…xw(t)x()x2(t0…xw(t)] 式中I为单位矩阵。 是系统的2W个节点在t时刻的状态;邻接矩阵 根据矩阵不等式关系得: A=(a)2x2w称为系统矩阵,A1、A2分别表示组成 2N=rank[,I-A,B]≤ rank:I-A]+rank[B] (10) 有向相依网络的两个有向子网络内部节点间的相 进一步得 互作用关系,A12、A21表示两子网络节点之间的相 rank [B]>2N-rank [AI-A] (11) 互作用关系,B=(b)2xw称为输入矩阵(M≤2), 上式满足恒成立关系,则: 它表示输入信号与网络的连接方式,()= rank [B]>max (2N-rank [I-A]) [41()2)…uu()]F为输入向量。 maxμ(a}=u(a) (12) 定理1对于一个可控系统来说,最少控制 进一步可得 输入个数是系统矩阵特征值中具有最大代数重数 min (rank[B])>max [N-rankiI-A])= 的特征值所对应的几何重数。 max{μ(al=μ(a) (13) 为了有效地衡量有向相依网络的可控性,本 再由N,和特征值几何重数定义可知: 文采用np作为网络可控性能指标,表示为 No=μ(aM) (14) w=为 (3) 式中:μ()为特征值对应的几何重数,μ()为特 式中:N,和2W分别为控制有向相依网络所需的最 征值“对应的几何重数,M是系统矩阵最大代数 少控制输入个数和网络节点总数。no越小,表示 重数所对应的特征值。 有向相依网络的可控性越强。 由Nn的定义可得: Np min(N) (15) 1.3理论分析 对于满足状态方程(2)的系统来说,其节点总 最后可得: 数是不变的且为W=2W,若使得系统满足其可控 =六 (16) 性,需通过外部控制输入作用于系统节点。假设 由此可知,当No越小时,no越小,即有向相依 得到外部控制输入作用的节点个数为N1,未作用 网络的可控性就越好。 的节点个数为N2,则 如图2表示一个有向相依网络,其中子网络 No=N1+N2 (4) 节点数Na=Ns=5,相依节点比例F=2/5=0.4,黑 对于可控系统来说,必然存在一个得到外部 色带箭头线表示子网络内部的有向边,黑色双向 控制输入作用节点的最小个数,记为min(W),使 箭头虚线表示相依边,山、、为控制输入,其数 得系统达到可控要求,并且未作用的节点个数达 量为最小控制输人个数N。由图2的连接关系可 到最大,记为max(W2),得 得系统矩阵A以及特征值:1.2 严格可控性 在现代控制理论中,如果通过一些控制变量 的输入能使一个系统从任意初始状态达到理想状 态,我们称这个系统是可控的。这里只考虑线性 时不变系统并且假设系统内部未发生动态变化。 有向相依网络状态方程为 x˙ = Ax(t)+ Bu(t) = [ A1 A12 A21 A2 ] x(t)+ Bu(t) (2) x(t)=[x1(t) x2(t) ··· xN(t) x ′ 1(t) x ′ 2(t) ··· x ′ N(t)]T 2N t A = ( ai j) 2N×2N A12 A21 B = ( bi j) 2N×M (M ⩽ 2N) u(t) = [u1(t) u2(t) ··· uM(t)]T 向量 是系统的 个节点在 时刻的状态;邻接矩阵 称为系统矩阵,A1、A2 分别表示组成 有向相依网络的两个有向子网络内部节点间的相 互作用关系, 、 表示两子网络节点之间的相 互作用关系, 称为输入矩阵 , 它表示输入信号与网络的连接方式, 为输入向量。 定理 1 对于一个可控系统来说,最少控制 输入个数是系统矩阵特征值中具有最大代数重数 的特征值所对应的几何重数。 nD 为了有效地衡量有向相依网络的可控性,本 文采用 作为网络可控性能指标,表示为 nD = ND 2N (3) ND 2N nD 式中: 和 分别为控制有向相依网络所需的最 少控制输入个数和网络节点总数。 越小,表示 有向相依网络的可控性越强。 1.3 理论分析 N0 = 2N N1 N2 对于满足状态方程 (2) 的系统来说,其节点总 数是不变的且为 ,若使得系统满足其可控 性,需通过外部控制输入作用于系统节点。假设 得到外部控制输入作用的节点个数为 ,未作用 的节点个数为 ,则 N0 = N1 +N2 (4) min(N1) max(N2) 对于可控系统来说,必然存在一个得到外部 控制输入作用节点的最小个数,记为 ,使 得系统达到可控要求,并且未作用的节点个数达 到最大,记为 ,得 N0 = min(N1)+max(N2) (5) 从而可得 min(N1) N0 = 1− max(N2) N0 (6) 在此定义最小控制比例nD为得到外部控制输 入作用节点的最小个数占节点总数的比例,记 nD = min(N1) N0 (7) 由式 (7) 可知:若nD越小,系统的可控性就越好。 ND 然而需要确定能够达到控制效果所需的最少 控制输入个数。在这里将最小控制输入个数 定义为达到系统可控性要求时,输入矩阵 B 秩的 最小值,即 ND = min{rank(B)} (8) λi(i = 1,2,··· ,2N) 若满足状态方程 (2) 的系统是可控的,那么 由 PHB 判定定理可知,对矩阵 A 的任意特征值 ,下式恒成立: 2N = rank[λi I− A,B] (9) 式中 I 为单位矩阵。 根据矩阵不等式关系得: 2N = rank[λi I− A,B] ⩽ rank[λi I− A]+rank[B] (10) 进一步得 rank[B] ⩾ 2N −rank[λi I− A] (11) 上式满足恒成立关系,则: rank[B] ⩾ max{2N −rank[λi I− A]} = max i {µ(λi)} = µ ( λ M ) (12) 进一步可得 min(rank[B]) ⩾ max{N −rank[λi I− A]} = max i {µ(λi)} = µ ( λ M ) (13) 再由 ND和特征值几何重数定义可知: ND = µ ( λ M ) (14) µ(λi) λi µ ( λ M ) λ M λ M 式中: 为特征值 对应的几何重数, 为特 征值 对应的几何重数, 是系统矩阵最大代数 重数所对应的特征值。 由 ND的定义可得: ND = min(N1) (15) 最后可得: nD = ND 2N (16) 由此可知,当 ND越小时,nD越小,即有向相依 网络的可控性就越好。 NA = NB = 5 F = 2/5 = 0.4 u1 u2 u3 ND λ 如图 2 表示一个有向相依网络,其中子网络 节点数 ,相依节点比例 ,黑 色带箭头线表示子网络内部的有向边,黑色双向 箭头虚线表示相依边, 、 、 为控制输入,其数 量为最小控制输入个数 。由图 2 的连接关系可 得系统矩阵 A 以及特征值 : A1 A2 A3 A4 A5 B1 B2 B3 B4 B5 图 1 有向相依网络 Fig. 1 The interdependent directed network ·604· 智 能 系 统 学 报 第 13 卷