正在加载图片...
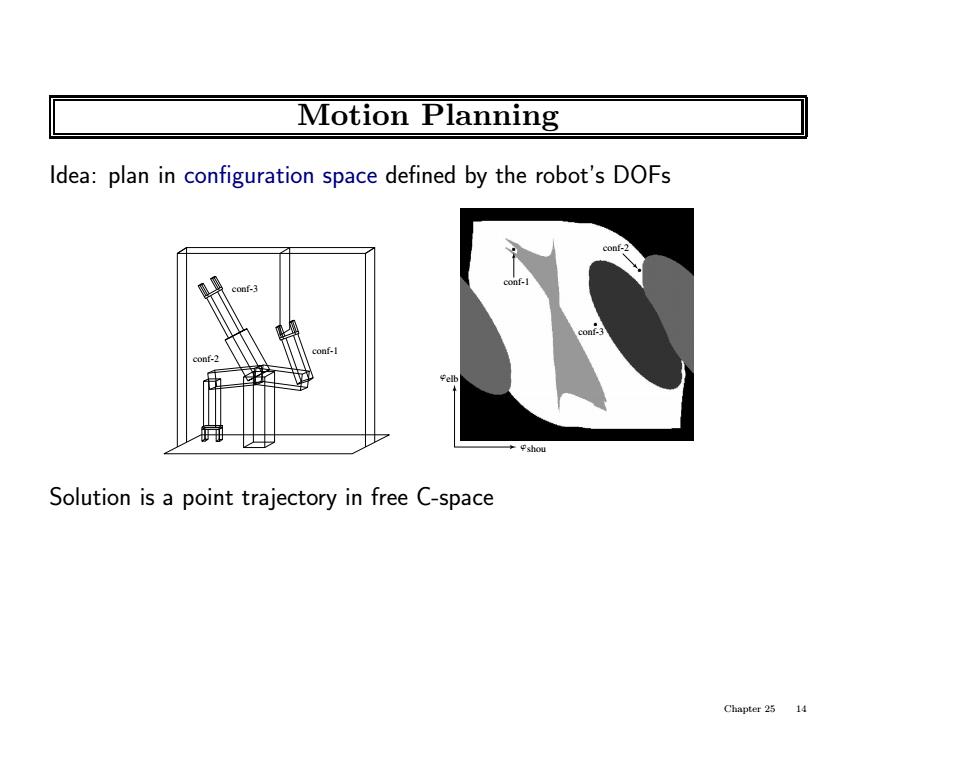
Motion Planning Idea:plan in configuration space defined by the robot's DOFs conf-3 onf- conf-2 sho Solution is a point trajectory in free C-space Chapter 25 14 Motion Planning Idea: plan in configuration space defined by the robot’s DOFs conf-3 conf-1 conf-2 conf-3 conf-2 conf-1 w w elb shou Solution is a point trajectory in free C-space Chapter 25 14