正在加载图片...
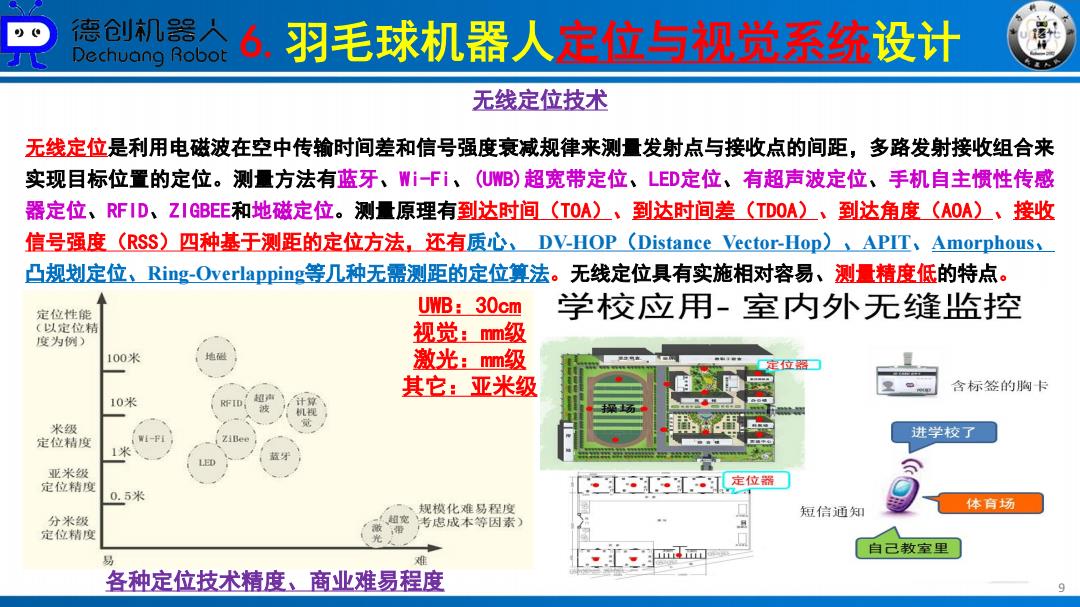
德创机器人 Dechuang Robot 6.羽毛球机器人定位与视觉系统设计 无线定位技术 无线定位是利用电磁波在空中传输时间差和信号强度衰减规律来测量发射点与接收点的间距,多路发射接收组合来 实现目标位置的定位。测量方法有蓝牙、Wi-F引、(UWB)超宽带定位、LED定位、有超声波定位、手机自主惯性传感 器定位、RFID、ZIGBEE和地磁定位。测量原理有到达时间(TOA)、到达时间差(TDOA)、到达角度(AOA)、接收 信号强度(RSS)四种基于测距的定位方法,还有质心,DV-HOP(Distance Vector-Hop),APIT、Amorphous、 凸规划定位、Ring-Overlapping等几种无需测距的定位算法。无线定位具有实施相对容易、测量精度低的特点。 定位性能 UWB:30cm 学校应用-室内外无逢监空 (以定位相 度为例) 视觉:mm级 100米 地磁 激光:m级 庄位器口 其它:亚米级 含标签的胸卡 10米 RFID: 超 计算 机视 米级 进学校了 定位精度 WI-FI 1米 LED 蓝好 亚米级 定位精度 ·。。定位器 0.5米 、规模化难易程度 短信通知 体育场 分米级 宽考虑成本等因素) 定位精度 液带 光 自己教室里 易 难 各种定位技术精度、商业难易程度 96.羽毛球机器人定位与视觉系统设计 9 无线定位技术 无线定位是利用电磁波在空中传输时间差和信号强度衰减规律来测量发射点与接收点的间距,多路发射接收组合来 实现目标位置的定位。测量方法有蓝牙、Wi-Fi、(UWB)超宽带定位、LED定位、有超声波定位、手机自主惯性传感 器定位、RFID、ZIGBEE和地磁定位。测量原理有到达时间(TOA)、到达时间差(TDOA)、到达角度(AOA)、接收 信号强度(RSS)四种基于测距的定位方法,还有质心、 DV-HOP(Distance Vector-Hop)、APIT、Amorphous、 凸规划定位、Ring-Overlapping等几种无需测距的定位算法。无线定位具有实施相对容易、测量精度低的特点。 各种定位技术精度、商业难易程度 UWB:30cm 视觉:mm级 激光:mm级 其它:亚米级